Submitted:
29 May 2025
Posted:
30 May 2025
You are already at the latest version
Abstract
The development of wearable robotic exoskeletons has seen rapid progress in recent years, driven by the growing need for technologies that support motor rehabilitation, assist individuals with physical impairments, and enhance human capabilities in both clinical and everyday contexts. Within this field, elbow exoskeletons have emerged as a key focus due to the joint’s essential role in upper limb functionality and its frequent impairment following neurological injuries such as stroke. With increasing research activity, there is a strong interest in evaluating these systems not only from a technical perspective but also in terms of user comfort, adaptability, and clinical relevance. This review investigates recent advancements in elbow exoskeleton technology, evaluating their effectiveness and identifying key design challenges and limitations. Devices are categorized based on three main criteria: mechanical structure (rigid, soft, or hybrid), actuation method, and sensing technologies. Additionally, the review classifies systems by their supported range of motion, flexion-extension, supination-pronation, or both. Through a systematic analysis of these features, the paper highlights current design trends, common trade-offs, and research gaps, aiming to guide the development of more practical, effective, and accessible elbow exoskeletons.
Keywords:
elbow exoskeleton
; assistive
; rehabilitation
; augmentation
; sensor
; actuator
1. Introduction
The human upper limb, particularly the elbow joint, plays a critical role in performing a wide range of daily activities, from simple tasks like eating to complex functions in professional settings [1]. However, injuries, aging, neurological conditions, or physical impairments can severely affect the functionality of the elbow, limiting mobility and independence [2,3,4]. As the demand for assistive technologies grows, elbow exoskeletons have emerged as a promising solution for both rehabilitation and augmentation of human motion. These wearable robotic systems are specifically designed to assist users in performing elbow-related movements, improving the joint’s mobility and function. Based on the natural biomechanics of the human elbow, these systems enable the mechanical transfer of power to produce two primary types of joint motions: flexion-extension and pronation-supination.
An exoskeleton, in general, wearabl is a device aimed at supporting and assisting designed to move in harmony with the movements of the human body [5,6]. Numerous models of exoskeletons have been created and developed to serve various purposes, from rehabilitation to industrial applications. Elbow exoskeletons, as a subset of this technology, are created to provide support during elbow motions, either assisting with movement or aiding in rehabilitation processes.
Elbow exoskeletons are mechatronic systems including actuators, sensors, and control systems to facilitate smooth interaction between the user and the device. The actuators actuate or support natural limbs’ and joints’ movement, while sensors monitor system status, for example joint angles, muscle activity, forces, and other key variables. Control algorithms then interpret this sensor feedback to provide the appropriate level of assistance or resistance. As these devices evolve, their design has become increasingly sophisticated, incorporating advances in robotics, biomechatronics, and sensor technologies.
This review paper aims to provide a comprehensive overview of the current state of elbow exoskeletons, with a focus on their design, actuation systems, sensor technologies, control strategies, and evaluation methods. We will examine the major actuation types, including pneumatic, hydraulic, cable-based, and electric systems, and their suitability for various applications. Additionally, we will explore the key sensors used for feedback and control, such as force sensors, torque sensors, EMG sensors, and IMUs. Finally, the paper will discuss the challenges faced in their development and the emerging trends in the field. The review concludes with a discussion on future directions, including the integration of artificial intelligence, soft robotics, and the commercialization of these technologies for broader use in clinical and industrial settings.
1.1. Methodology
To ensure a comprehensive and relevant review of current advancements in elbow exoskeleton technologies, a systematic literature search was conducted using Google Scholar as the primary research database. This platform was chosen for its wide coverage of scholarly materials across disciplines, including engineering, biomechanics, and rehabilitation sciences. The keywords used during the search process included combinations of terms such as elbow exoskeleton, upper arm exoskeleton, rehabilitation, assistive, and augmentation. These terms were selected to capture a broad yet focused set of studies related to both clinical and non-clinical applications of upper-limb exoskeletons.
The inclusion criteria for selecting sources emphasized academic rigor and relevance to the topic. Therefore, we prioritized peer-reviewed journal articles and conference papers. In total, 50 research papers were selected after screening for relevance, technical depth, and contribution to the understanding of elbow exoskeleton design and development. From this pool, we identified and analyzed 15 individual elbow exoskeleton devices. These devices were selected based on the availability of detailed technical specifications and their representation of various design approaches. Each device was studied and compared across several key dimensions, including mechanical structure, degrees of freedom (DOF), type of actuators used, and the types and roles of sensors integrated into the system.
The reviewed literature spans the last 15 years, from 2010 to 2024, allowing us to trace the evolution of elbow exoskeleton technologies over time. This time distribution also provides insight into emerging trends, shifting research focuses, and the gradual maturation of technologies from prototype stages to more refined and potentially market-ready systems. By analyzing how the designs and purposes of elbow exoskeletons have changed over the years, we aim to present not only a comparative analysis of current technologies but also a contextual understanding of how this field has developed and where it may be heading.
2. Anatomy of Human Elbow
The human body is divided into two main sections: the upper limb and the lower limb. The upper limb itself consists of three sections: the upper arm, forearm, and hand. Within these sections, we find important structures crucial for movement, such as the shoulder complex, elbow complex, wrist joint, and fingers. These structures work in harmony to provide the dexterity and flexibility necessary for complex tasks. The human upper limb features seven degrees of freedom (DOFs): three in the shoulder, two in the elbow, and two in the wrist. As noted by Gull and colleagues, most studies model the elbow as having only one degree of freedom, but it actually has two: one for extension-flexion and the other for supination-pronation. While research often focuses on extension-flexion due to its simpler implementation, supination-pronation is equally important, particularly for tasks like eating and drinking, which require the rotation of the forearm. [7]
2.1. Bones and Joint Structure
The elbow joint itself is a complex hinge joint formed by the articulation of three bones: the humerus, radius, and ulna. These bones are connected by ligaments that provide stability while allowing for movement. The humerus, the long bone of the upper arm, connects to the radius and ulna in the forearm. The articulation between the humerus and ulna creates the primary hinge motion for flexion and extension, while the radius enables pronation and supination movements at the forearm. This joint structure allows for two critical types of motion: flexion-extension and pronation-supination, which are vital for performing everyday tasks [8].
2.2. Muscles and Tendons
Key muscles involved in elbow movement include the biceps brachii, triceps brachii, and brachialis, among others. These muscles work together to control the motion of the elbow. The first one is biceps brachii, primarily responsible for elbow flexion, the biceps help bend the arm at the elbow joint. Second one is triceps brachii, the triceps oppose the action of the biceps and are responsible for elbow extension, straightening the arm. Then, the third one is rachialis, a muscle located beneath the biceps, it assists in flexion of the elbow, particularly when the forearm is in a pronated position. Additional muscles, such as the pronator teres and supinator muscles, play key roles in forearm rotation, supination and pronation [9].
2.3. Ligaments
The stability of the elbow joint is maintained by several key ligaments. The Ulnar Collateral Ligament (UCL) provides medial support, preventing excessive sideways movement of the elbow, particularly during overhead activities. On the lateral side, the Radial Collateral Ligament (RCL) resists forces that might push the elbow outward, ensuring lateral stability. Additionally, the Annular Ligament encircles the radius and enables it to rotate smoothly with the ulna during supination and pronation movements. [10]
2.4. Movement, Range of Motion, and Force
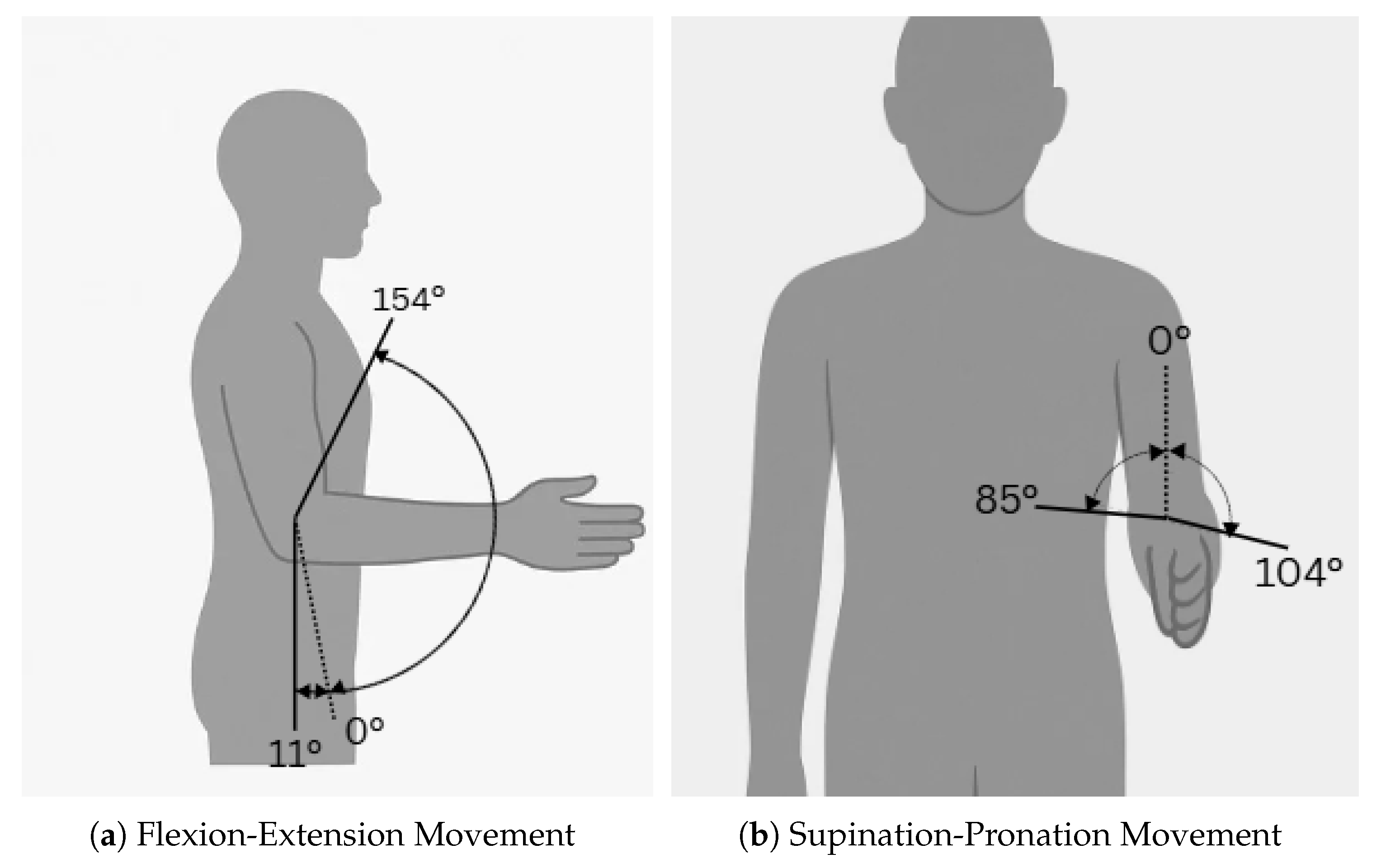
The primary movements of the elbow joint are flexion and extension, occurring along the sagittal plane. The normal range of motion for elbow flexion is from 0° (full extension) to around 154°, allowing for various everyday motions such as lifting and reaching. In addition, the elbow permits pronation and supination, rotational movements primarily between the radius and ulna, facilitating activities like turning a doorknob or holding a cup. The typical range for pronation is 0° to 85° and supination is 0° to 104° [8]. Moreover, understanding the torque required for these movements is essential for biomechanical analysis. Pronation and supination typically require about 0.06 Nm of torque [11], whereas flexion and extension demand considerably more, approximately 2.7 Nm [12].
Figure 1.
Elbow Movement Scheme: (a) Flexion-Extension, (b) Supination-Pronation.
3. Elbow Exoskeleton Application
The concept of exoskeletons was first developed in the late 1960s for military purposes. The first successful prototype introduced in the 1960s was called Hardiman. At that time, the actuator system used was a hydraulic actuator, designed to provide strength assistance to the user [13]. Since this initial introduction, significant developments have been made in the design of elbow exoskeletons due to their potential, not only in military applications but also in improving users’ quality of life and serving various other purposes, such as in industrial applications.
Elbow exoskeletons are commonly found in three main scenarios: assistive, rehabilitation, and augmentation [14].
3.1. Assistive Application
According to the World Health Organization (WHO), approximately 16.5 percent of the global population suffers from motor impairments, limiting their ability to engage in physical activities. To address this, lightweight and comfortable elbow exoskeletons have been designed for daily use as an assistive device [15]. These devices are also frequently used by elderly individuals with reduced physical strength to ease their daily routines [16]. In these scenarios, elbow exoskeletons serve as assistive devices, helping users perform daily activities more easily, such as lifting objects, reaching, or carrying groceries. The primary goal is to improve the quality of life for individuals with motor disabilities by providing them with the extra strength and stability they need to perform routine tasks with less effort.
3.2. Rehabilitation Application
In addition to being assistive devices, elbow exoskeletons can also be used in rehabilitation. One example is in the case of stroke. Stroke, as we know, is one of the most dangerous illnesses and the second-leading cause of death worldwide. According to WHO, 15 million people suffer from stroke each year [17]. However, stroke is still a condition that can be managed and treated if immediate action is taken, and today, many stroke survivors can be found. Despite this, stroke remains a leading cause of upper limb impairment, with many survivors losing the ability to move their arms. For this reason, several elbow exoskeletons have been specifically designed to assist therapists in performing rehabilitative exercises, helping survivors regain mobility [18]. These exoskeletons are equipped with sensors and actuators that allow for controlled, repetitive motion, aiding in neuromuscular recovery. By using exoskeletons in therapy, patients can receive targeted assistance to restore motion, reduce the effects of muscle atrophy, and improve motor control, all while ensuring proper biomechanics during the recovery process. [19]
3.3. Augmentation Application
Beyond the healthcare applications mentioned earlier, elbow exoskeletons also play an important role in the augmentation field. Building on the original idea first implemented in Hardiman [7], and with technological advancements, elbow exoskeletons are increasingly being used for augmentation purposes, such as assisting industrial workers with lifting and carrying heavy loads or aiding soldiers in military operations. This not only provides additional strength to the user but also protects them from both minor and severe injuries. In industrial settings, for example, workers often face physically demanding tasks that require heavy lifting or repetitive movements, leading to long-term physical strain. Elbow exoskeletons can mitigate the risk of injury by supporting the arm during lifting and improving endurance. Similarly, in military applications, exoskeletons enhance the strength and stamina of soldiers, enabling them to carry heavier equipment for extended periods and reducing fatigue. These devices help improve the overall performance of users in environments where physical exertion is high, making them valuable tools for a wide range of industries and sectors. [14,20]
4. Elbow Exoskeleton Classification
Elbow exoskeletons can be classified into different types based on their mechanical structure and the nature of the assistance they provide. These classifications highlight the fundamental design differences and the types of assistance these devices offer to the user.
4.1. Rigid, Soft, and Hybrid Elbow Exoskeleton
Based on its mechanical structure, exoskeletons can be categorized into rigid, soft, or even hybrid exoskeletons[21].
Figure 2.
The drawing of three different mechanical structures of Exoskeleton: (a) Rigid Exoskeleton , (b) Soft Exoskeleton and (c) Hybrid Exoskeleton [21].
Figure 2.
The drawing of three different mechanical structures of Exoskeleton: (a) Rigid Exoskeleton , (b) Soft Exoskeleton and (c) Hybrid Exoskeleton [21].
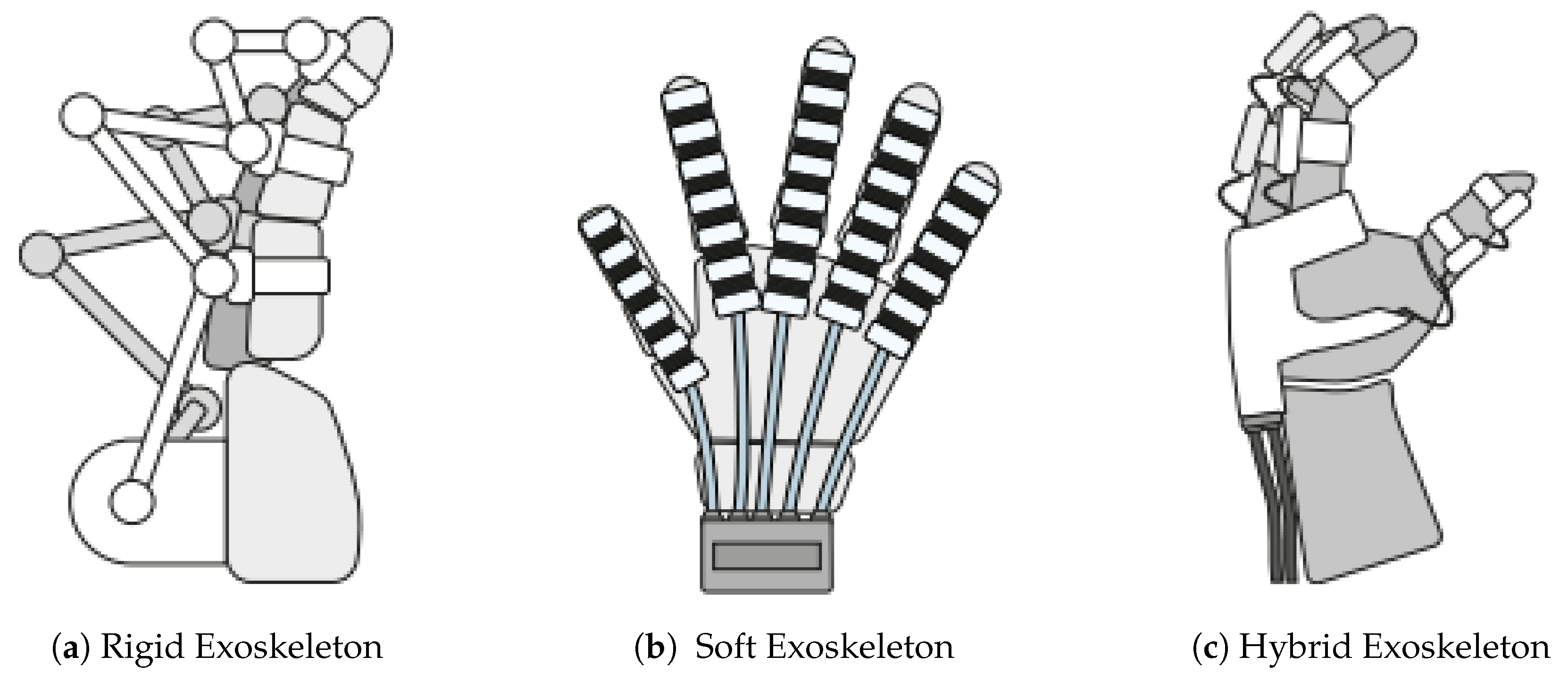
Rigid exoskeletons provide strong structural support and precise control but tend to be heavier and more expensive due to material choices. These exoskeletons are often made from PLA, metal, carbon fiber, or other strong materials that offer higher levels of force output and support. They are designed to assist with tasks requiring greater strength and stability, making them ideal for rehabilitation and augmentation applications [1].
While rigid exoskeletons give strong support, soft exoskeletons prioritize comfort and flexibility. They are made from lighter, flexible materials like textiles or polymers, which are easier to wear and better integrated into the user’s daily activities. These exoskeletons provide less mechanical force but offer greater adaptability to the human body, making them especially beneficial for assistive applications. Soft exoskeletons are generally lightweight, breathable, and more comfortable for prolonged use. [22,23,24,25]
On the other hand, a hybrid exoskeleton designed to support and enhance human movement while maintaining a balance between flexibility and structural support. Unlike fully soft exoskeletons, which use soft materials for maximum comfortability, hybrid exoskeletons usually use hard material for their structural support and use soft material actuator for its actuation syestem [26,27,28,29].
4.2. Active and Passive Elbow Exoskeleton
In addition to the rigid-soft classification, exoskeletons can also be categorized into active and passive systems. Active exoskeletons use powered actuators to actively assist the user’s movements. These devices provide greater control and allow for precise, adjustable support, making them ideal for tasks that require significant strength or precision, such as lifting heavy objects or performing rehabilitation exercises. Active systems are commonly used in rehabilitation and augmentation settings, where user performance and strength are enhanced through powered assistance. In contrast, passive exoskeletons rely on springs, damping mechanisms, or other passive elements to assist motion. These systems do not have powered actuators and instead provide support through mechanical advantage, allowing users to move more easily without generating additional power. Passive exoskeletons are typically lighter, less expensive, and simpler in design. They are ideal for users who need less intensive support or for use in less physically demanding activities. [30,31]
5. Elbow Exoskeleton Actuation System
In an elbow exoskeleton, the actuator serves as the core driving element that generates motion and force to assist, augment, or rehabilitate the elbow joint. Its primary function is to mimic or support the natural flexion and extension of the elbow. The choice of actuator significantly influences the exoskeleton’s performance, comfort, and suitability for specific applications. There are some types of actuators commonly used in elbow exoskeletons: pneumatic, hydraulic, cable-based, electric, and Shape Memory Alloy.
5.1. Pneumatic Actuator
Pneumatic actuators operate using compressed air to create movement and are known for their lightweight structure and rapid response. In elbow exoskeletons, this makes them particularly appealing for assistive settings where safety and compliance with the user’s natural motion are important. Since air is compressible, pneumatic systems are generally softer and more forgiving, reducing the risk of injury. However, their reliance on external air sources like compressors or tanks limits portability, and precise motion control is difficult due to the compressibility of air. [32]
5.2. Hydraulic Actuator
Hydraulic actuators use pressurized fluids to produce high levels of force, offering exceptional power density and fine-grained control. However, their main drawbacks are size, weight, and the complexity of fluid systems, which require pumps, reservoirs, and hoses. These systems can also leak, creating safety and maintenance issues. Due to these limitations, hydraulics are not ideal for mobile or wearable applications, but they shine in stationary, heavy-duty use cases. [33]
5.3. Cable-Based
Cable-based actuators, such as Bowden cable systems or Twisted String Actuators (TSA), use remotely placed motors to transmit force via flexible cables or strings, allowing the joint itself to remain lightweight and minimally encumbered. In TSA systems, a motor twists a pair of strings, causing them to shorten and generate linear motion that can be converted into joint rotation making the setup compact and mechanically simple [34]. These systems are ideal for soft or wearable exoskeletons where low joint weight and flexibility are critical, such as in assistive daily-use or rehabilitation devices. However, they often suffer from mechanical losses due to friction, cable stretch, and hysteresis, especially in Bowden cables, and they require periodic maintenance to maintain performance [23]. Despite these drawbacks, their ability to offload weight from the joint and conform to the human body makes them a popular choice in ergonomic and user-friendly exoskeleton designs.
5.4. Electric Actuator
Electric actuators, like servo or brushless DC motors, convert electrical energy into mechanical motion and offer high precision, control, and reliability. They’re commonly used in portable and battery-powered exoskeletons for both assistive and rehabilitative purposes, thanks to their ease of integration with digital control systems. However, delivering high torque directly at the elbow often requires motors that are relatively heavy and may need cooling solutions to prevent overheating. Despite these trade-offs, electric actuators are favored for applications that demand smooth, precise, and responsive movement in a compact and mobile format. [35]
5.5. Shape Memory Alloy
Shape Memory Alloy (SMA) actuators are smart materials that can return to their original shape when heated. They work by changing shape in response to temperature, which creates movement. This makes them useful for small, lightweight, and quiet devices, like wearable exoskeletons. SMAs are especially good for soft and compact designs because they don’t need motors or gears. However, they can be slow to cool down and may not be strong enough for heavy tasks. [4,36]
6. Elbow Exoskeleton Sensor Technologies
In an elbow exoskeleton, sensors play a crucial role in enabling intelligent interaction between the user and the device. They provide real-time data that allows the system to interpret user intention, monitor movement, control actuators, and ensure safety. Depending on the purpose of the exoskeleton be it assistive, rehabilitative, or industrial different types of sensors are integrated to gather information on muscle activity, joint motion, external forces, and environmental conditions. Among the commonly used sensors in elbow exoskeletons are force sensors, torque sensors, electromyography (EMG) sensors, and inertial measurement units (IMUs). Each of these serves a specific function in enhancing the responsiveness, adaptability, and effectiveness of the exoskeleton system.
6.1. Force Sensor
Force sensors are used to measure the amount of linear force being applied, either by the user or the exoskeleton itself. In elbow exoskeletons, load cells are often embedded at the attachment interfaces such as straps or rigid frame connections to monitor how much force is being exerted during movement or assistance [37]. This information is essential for modulating the actuator’s output in real-time, ensuring that the device provides the appropriate level of support or resistance. Force sensors also contribute to user safety by detecting unexpected loads that could indicate misuse or a malfunction.
6.2. Torque Sensor
Torque sensors provide measurements of rotational force at the joint. These sensors are particularly important in robotic exoskeletons where the control system needs to know how much torque the actuator is delivering or how much torque is being applied by the user [38]. By integrating torque sensors at the joint or motor, the system can precisely balance its assistance or resistance, leading to smoother, more natural movements.
6.3. EMG Sensor
EMG sensors detect the electrical activity produced by muscle contractions. Surface EMG sensors, which are non-invasive and placed on the skin, are commonly used on the biceps and triceps in elbow exoskeletons [26,27,28]. These sensors allow the system to interpret the user’s muscle activation patterns, effectively reading their intention to move. This capability is particularly valuable in assistive and rehabilitative devices, where user-driven control enhances engagement and effectiveness.
6.4. IMU Sensor
IMUs combine accelerometers, gyroscopes, and sometimes magnetometers to measure orientation, acceleration, and angular velocity [39]. IMUs are lightweight and compact, making them ideal for wearable systems. They are particularly useful in scenarios where continuous motion monitoring is required, such as during rehabilitation exercises or physical assistance tasks.
7. Existing Technologies of Elbow Exoskeleton
The development of elbow exoskeletons has advanced significantly, resulting in a variety of designs that differ in actuator mechanisms, sensor integration, degrees of freedom, and portability. Each configuration serves unique rehabilitation and assistive purposes. Table 1 presents a comprehensive list of elbow exoskeletons that are discussed in this paper, including their key features and specifications. Corresponding images of the devices are provided in Figure 3 to support visual understanding of the designs.
Introduced in 2020, the ExoSuit by Hosseini et al. [22] is a fully soft, assistive wearable device designed for flexion-extension tasks. It utilizes a TSA, in which an electric motor twists a string to generate linear tension. This compact and lightweight mechanism eliminates the need for bulky gears or pulleys, resulting in a low mechanical impedance system that reduces resistance and enhances user comfort. The ExoSuit is particularly well-suited for daily assistive use due to its modularity and gearless simplicity. It integrates surface electromyography (sEMG) sensors that monitor muscle activity in both the biceps and triceps, enabling adaptive, muscle-effort-sensitive control during both load application and removal. A similar TSA-based design was introduced earlier in 2013 by Popov et al. [29], featuring a rigid two-link structure mimicking human upper and forearm anatomy. This earlier design also benefits from the compactness and efficiency of the TSA, with the actuator connected via a coaxial pulley aligned with the elbow joint. However, its rigid structural materials may limit flexibility and long-term user comfort when compared to the fully soft construction of the ExoSuit.
The Soft Elbow Exoskeleton, developed by Wu et al [2] in 2023, is a soft-suit system designed for rehabilitation training, particularly targeting flexion-extension movements. It employs compliant tendon-sheath actuators driven by integrated servo motors, with real-time control implemented via a Matlab/xPC platform. The soft structure eliminates issues of joint misalignment, enhancing human-robot coordination and making the device comfortable and suitable for extended use. The system integrates sEMG sensors to monitor muscle activity in the biceps and triceps, along with IMUs to track motion, enabling intention-based adaptive assistance. Fastened with Velcro straps for a secure and wearable fit, this sensor-driven, soft-material design is particularly well-suited for long-term rehabilitation applications.
The Ultralow Impedance Exoskeleton (ULIX) [3], developed by Chen et al. in 2019, is a semi-rigid rehabilitation device designed to assist with elbow flexion-extension and forearm supination-pronation. It features a cable-driven differential transmission paired with Series Elastic Actuators (SEAs), enabling high torque output while keeping the total worn mass under 0.9 kg. By decoupling the actuation hardware from the user via Bowden cable transmissions, the system significantly reduces inertia and enhances user comfort during rehabilitation tasks. The SEAs incorporate nonlinear torsional springs that provide low impedance during free movement and high stiffness under load, allowing for precise and responsive torque control. To further improve control fidelity, ULIX integrates dual encoders in each SEA to measure spring deflection and torque, along with an additional encoder on the forearm ring to compensate for control delays caused by cable slack and stiction. This dual-degree-of-freedom, sensor-rich design makes ULIX particularly well-suited for comprehensive upper-limb rehabilitation.
Several soft exoskeletons such as Soft Exoskeleton by Wei et al. (Figure 3a), Soft Wearable Exosuit by Xiloyannis et al. (Figure 3b), and Lightweight Exosuit by Missiroli et al. (Figure 3e) also utilize Bowden cable transmissions. The designs employ Bowden cable transmissions similar to the ULIX system but differ in their fully wearable and mobile configurations. These devices prioritize flexibility and user mobility by utilizing soft fabric structures, thereby enhancing comfort and wearability. In the 2018 design, designed by Wei et al., the motor is mounted remotely to minimize bulk at the joint, with force transmitted through Bowden cables [23]. Ergonomic considerations are central to the system, with carefully positioned anchor points on the textile interface and Velcro straps ensuring a secure yet comfortable fit. These exoskeletons are typically classified as soft elbow devices and vary in their sensor setups some use force sensors, while others incorporate IMUs for motion detection enabling different modes of assistive support depending on the application [6,23,24].
Among EMG-responsive systems, the Elbow Exoskeleton (2023) by Emir Mobedi highlights the effectiveness of surface EMG sensors in detecting user intention. This device also focuses on improving ergonomics in industrial tasks involving repetitive and high-effort movements, building on prior work demonstrating the value of EMG-based control. It features a lightweight, cable-driven actuator using a series elastic actuation (SEA) system with a bungee element that mimics the damping and compliance of human muscles. Designed to support a single degree of freedom (elbow flexion/extension), the system incorporates a custom spool mechanism, an encoder for joint position tracking, a load cell for cable tension measurement, and an EMG interface for adaptive force control based on muscle activity [26,27,28].
The Elbow-sideWINDER, developed by Park et al. in 2023, is a semi-rigid exoskeleton designed to support elbow flexion-extension during dynamic tasks in industrial environments, particularly those involving confined spaces. It employs a tendon-driven actuation system using Bowden cables, which enables compact force transmission while minimizing inertia and bulk. Control is achieved through a Myo armband that integrates eight sEMG sensors and a 3-axis accelerometer. These sensors estimate external loads based on muscle activity and track arm kinematics, respectively, feeding into a medium-level controller that dynamically adjusts assistive torque in real time. This streamlined, sensor-driven approach allows for effective load compensation with minimal hardware complexity, making the Elbow-sideWINDER well-suited for practical, real-world ergonomic applications. [41]
The Exoskeleton Arm, developed by Dezman et al. in 2023, is a rigid, modular device designed specifically to support forearm supination-pronation in rehabilitation contexts. It employs Bowden cable actuation and introduces a novel guided-rod mechanism in place of traditional C-ring bearings, enabling efficient rotational movement while reducing overall volume and weight. This design allows the system to be used independently or as a supplementary module alongside flexion-extension exoskeletons. While Bowden cable slack and stretch remain technical challenges, the device’s modularity makes it particularly well-suited for targeted rehabilitation where pronation-supination recovery is essential. [42]
The NEUROExos, developed by Vitiello et al., is a rigid elbow exoskeleton designed for neurological rehabilitation, particularly post-stroke recovery, offering one degree of freedom focused on elbow flexion and extension. It employs a custom-designed smart Series Elastic Actuator (SEA) that enables compliant and precise force control, critical for safe physical human–robot interaction. The SEA design facilitates impedance and admittance control strategies, allowing the device to adapt to patient-specific needs during therapy. The system integrates various sensors, including torque sensors within the actuator, position sensors (encoders), and force sensors, which together enable accurate joint torque measurement, motion tracking, and real-time monitoring of user-robot interaction forces. These features support adaptive therapy modes and ensure both safety and effectiveness in upper-limb rehabilitation [43].
Upper limb rehabilitation exoskeletons designed by Copaco et al (Figure 3d) uses special SMA actuators that are light (less than 1 kg) and quiet, making it comfortable to wear. These actuators work in pairs to control the elbow’s bending (flexion-extension) and twisting (pronation-supination), which means the exoskeleton can move in multiple ways like a natural arm. The design is simple and adjustable, so patients can easily put it on, and it’s made with low-cost parts including 3D-printed pieces. The device can either help move the arm (active mode) or just record movement data while the patient moves on their own (passive mode). Sensors inside the exoskeleton track the arm’s position accurately, helping the actuators work smoothly. This combination of sensors, actuators, and multiple movement options makes the exoskeleton a useful and affordable tool for arm rehabilitation. [40]
A range of innovative elbow exoskeletons has emerged in recent years, exploring both motor-tendon and pneumatic actuation methods for assistive and rehabilitation purposes. The Soft Elbow Exoskeleton (Figure 3c) features a dual-degree-of-freedom motor-tendon actuator system combined with infrared sensors[25]. In the pneumatic category, designs like the Robotic Elbow Sleeve [17] and the Carry exoskeleton (Figure 3f) provide high compliance and safe force delivery through air-powered actuators enclosed in textile sleeves. Specifically, the Carry system is designed for industrial and assistive tasks such as load holding and carrying, delivering up to 11 Nm of torque at 3.65 bar. Pressure sensors operating at 100 Hz enable responsive torque control, while the system demonstrates reductions in EMG activity, metabolic cost, and user fatigue. However, all pneumatic systems face limitations in portability and dynamic responsiveness due to reliance on external compressors, actuator filling/release cycles, and pressure constraints. [32]
While the Table 1 focuses solely on elbow exoskeletons, there are also upper-limb exoskeletons designed to accommodate a wider range of degrees of freedom (DOF), including shoulder and hand movements. In 2020, Yongtae et al. [30] developed an upper-limb exosuit intended for both industrial and rehabilitation applications. This exosuit is equipped with EMG sensors, a cable-driven actuation system using Bowden cables, and a voice recognition interface.
In 2021, Gull et al. introduced a 4-DOF upper-limb exoskeleton designed to assist individuals with disabilities. This system aimed to provide effective motion support across multiple joints [44]. In 2022, Paterna et al. proposed a passive upper-limb exoskeleton utilizing pneumatic artificial muscles, specifically targeting industrial use cases to reduce physical strain during repetitive tasks [31].
Various actuation mechanisms have also been explored in recent designs. The Harmony exoskeleton, for instance, employs Series Elastic Actuators (SEA) and offers 7 DOF—comprising 5 active DOF for the shoulder, 1 for the elbow, and 1 for the wrist—providing comprehensive upper-limb assistance [45]. In the same year, Park et al. developed a soft exosuit that uses Shape Memory Alloys (SMA) as actuators, offering a lightweight and compliant solution for upper-limb support [4].
Two additional full upper-limb exoskeleton systems worth noting are ETS-MARSE and the EXOTIC Exoskeleton. ETS-MARSE is a 7-DOF exoskeleton designed for rehabilitation purposes, assisting movement across the shoulder, elbow, forearm, and wrist joints [19]. In contrast, the EXOTIC Exoskeleton provides 5 DOF and features adjustable link lengths. Thøgersen et al. emphasized user safety in the EXOTIC design by incorporating mechanical stoppers, current limiters, an open-brace configuration, and a control system that only actuates upon user command. Additionally, the device is lightweight and includes a unique tongue-control interface for enhanced accessibility [15].
Elbow exoskeletons vary widely in their mechanical and control strategies. Soft, cable-driven systems dominate wearable, home friendly solutions, while rigid or pneumatic systems serve more specialized or clinical needs. Each system contributes uniquely to the evolving landscape of upper limb rehabilitation technologies.
8. Design and Engineering Challenges
The development of elbow exoskeletons involves not only the optimization of mechanical performance and control [44] but also a comprehensive consideration of human factors, usability, and practical deployment. The challenges are multifaceted, spanning actuator mechanics, signal processing, and user-centered design elements such as comfort, adjustability, and appearance.
This section integrates challenges identified across literature with analysis from current exoskeleton technologies (see Section 7).
8.1. Actuator and Responsiveness
A critical engineering challenge lies in designing actuators that deliver sufficient torque for elbow flexion and extension while maintaining a compact, lightweight form factor. Pneumatic actuators, as demonstrated in the soft robotic elbow sleeve by Koh et al. [17], offer safe and compliant motion, but require external air compressors, increasing overall system weight and reducing portability. Cable-driven systems, like those used in Elbow-sideWINDER [41] and ULIX [3], address portability by offloading motor mass to remote locations, but introduce frictional losses and control complexity. TSA-based systems like ExoSuit [22] offer a compact and cost-effective solution, though they face non-linear behavior and string fatigue over time [29,46].
8.2. Comfort and Wearability
For exoskeletons intended for prolonged use, especially in rehabilitation, comfort is paramount. Rigid or bulky components can cause discomfort, fatigue, or even misalignment with human joints. Designs must minimize contact pressure, use breathable and soft materials, and consider weight distribution. Soft wearable systems such as those by Wu and Chen [2] and Xiloyannis et al. [24] show promise.
8.3. Weight and Device Placement
Weight distribution affects both usability and safety. Devices must avoid placing excessive weight on the forearm or shoulder. Poor placement can lead to strain, reduced range of motion, or unnatural joint alignment. In soft robotic designs, there is a push toward decentralizing components (e.g., compressors, batteries) to the waist or back, as seen in TSA- and Bowden-based systems [2,22,41]. This improves ergonomics but might introduces cabling and connection management issues.
8.4. Safety and User Protection
Safety is a non-negotiable aspect, especially in rehabilitation. Devices must prevent hyperextension, respond appropriately to involuntary user motion, and fail gracefully in case of malfunction. Similarly, in the Elbow Exoskeleton designed by Ismail et al. [25] and Upper Limb Exoskeleton designed by Thorgesen et al. [15] user safety is a primary consideration during both wear and operation.
8.5. Sensor Accuracy and Stability
Effective control systems require stable and accurate sensor inputs. sEMG signals, while promising for intent detection, suffer from signal variability, placement sensitivity, and susceptibility to noise. This challenge requires robust filtering, threshold calibration, and session-specific tuning. Alternatives like joint torque sensors (e.g., in Elbow-sideWINDER [41]) and IMUs (e.g., [2,6]) provide consistent motion data but introduce complexity in mechanical integration and signal drift mitigation.
8.6. Cost and Accessibility
Many current exoskeleton prototypes are expensive to produce, limiting accessibility outside research or hospital settings. High costs stem from custom components, high precision actuators, and integrated electronics. Future engineering must focus on low-cost materials, modular assembly, and open-source electronics to enable community rehabilitation and assistive use at scale. Lightweight fabrication techniques like 3D printing and textile based integration offer promising avenues[22,40].
8.7. Adjustability and Fit
One size does not fit all. The customizability of joint alignment, strap tension, and arm dimensions is crucial, especially for systems targeting diverse populations such as elderly individuals or stroke patients. Many designs still lack simple, tool-free adjustment mechanisms. Modular architectures or self-aligning joints, like those proposed in NEUROExos [43], provide a solution, albeit at the cost of added complexity.
8.8. Ease of Use and Setup
The devices should be easy to don and doff independently. Primarily to avoid time-consuming setup, especially requiring a therapist’s assistance (rehabilitation application). Future systems must aim for plug-and-play usability, minimal calibration, and ideally self-guided instructions. Systems like [2], show progress in this area with user-friendly interfaces.
8.9. Design Appearance and Social Acceptability
Appearance may seem secondary but plays a significant role in user adherence, especially for wearables used outside clinical settings. Devices that resemble medical or industrial equipment may deter consistent use due to social stigma or aesthetic discomfort. Incorporating slim profiles, textile coverings, or clothing-like integration (as in soft systems [2,6,24]) may improve adoption and comfort, especially in social or work environments.
9. Future Direction and Trends
As elbow exoskeleton technology advances, new frontiers are emerging that aim to enhance user comfort, functionality, and accessibility across both clinical and daily life settings. Driven by interdisciplinary innovation across robotics, materials science, and neuroscience, the future of elbow exoskeletons will likely be defined by smart adaptability, seamless human-robot interaction, and integration into everyday rehabilitation and assistive routines.
9.1. Toward Fully Wearable and Portable System
One of the clearest trends is the miniaturization and portability of components. Future exoskeletons will increasingly abandon stationary or bulky support systems, such as external air compressors used in pneumatic actuators, in favor of self-contained, battery-powered units. Innovations like lightweight fabric-based actuators or twisted string systems have the potential to replace traditional rigid motors and bulky pneumatics while maintaining comparable torque outputs. Similar to several exoskeleton devices that have been developed, such as the soft actuated glove [47] and the MGlove-TS [48], which are exoskeletons for the hand and wrist, TSA has demonstrated good and promising performance, particularly in the field of rehabilitation. The use of TSA in these devices creates a more flexible and lightweight environment compared to other types of actuators. [49,50]
9.2. Smart and Adaptive
A shift toward intention-aware exoskeletons is evident in recent work, such as the soft elbow exoskeleton that uses sEMG-based control to interpret muscle signals for active assistance and IMU [2]. Future systems will leverage machine learning algorithms to classify and adapt to individual movement patterns, fatigue levels, and rehabilitation goals over time.
Combining multi-modal sensing including other sensors such as pressure sensors, torque sensors, and biosignals will enable context-aware exoskeleton behavior, adjusting support levels dynamically during use. Such closed-loop, adaptive control will reduce the need for frequent manual recalibration and enhance user comfort and safety.
9.3. Cost-Effective Manufacturing
Despite the promising clinical results, most elbow exoskeletons are limited to research labs or specialized clinics due to high costs and limited scalability. A future trend will be focused on low-cost, modular designs using 3D printing, open-source control electronics, and readily available materials. Modular exoskeleton kits that can be custom fitted or 3D printed on demand could democratize access, particularly in underserved or remote healthcare settings. The use of low-cost actuators is also a viable solution, in this regard, TSA offer a more cost-effective alternative compared to other actuator types [48].
10. Discussion and Conclusion
Elbow exoskeletons have emerged as essential tools in modern rehabilitation and assistive technologies. Their ability to support, augment, or restore arm movement makes them valuable across diverse applications from clinical recovery programs and daily assistive use to industrial support tasks. This review has highlighted the broad spectrum of mechanical structures, actuation systems, sensor integrations, and control strategies that define the current landscape of elbow exoskeleton development.
A prominent trend in recent years is the growing interest in cable-driven actuation mechanisms, particularly Bowden cables and TSA. While Bowden cable systems are widely adopted for their flexibility and remote actuation capabilities, TSA remains relatively underutilized in elbow exoskeletons despite its promising attributes. TSA systems offer a compact, lightweight, and low-impedance alternative that enhances user comfort and could become more prevalent as research into soft, adaptive devices advances.
Another notable observation is that most elbow exoskeletons currently focus exclusively on flexion-extension movement. This is likely due to the mechanical complexity involved in incorporating both flexion-extension and supination-pronation within a single device. Designing systems that accommodate these combined degrees of freedom remains a significant engineering challenge, often requiring trade-offs in size, weight, and usability.
A recurring theme across the reviewed systems is the trade-off between precision and usability. Rigid exoskeletons often achieve superior control accuracy and torque delivery but may compromise comfort, mobility, and long-term wearability. In contrast, soft-material and cable-driven designs enhance ergonomics and user experience but sometimes fall short in delivering the responsiveness or force required for intensive rehabilitation scenarios. Balancing functional performance with human-centered design remains a critical focus for future innovations.
Despite notable progress, technical challenges persist. These include improving the accuracy of user intention detection (particularly via EMG ), ensuring reliable power autonomy for untethered use, enhancing the stability of sensor readings, and optimizing actuator efficiency. Furthermore, the variability among users such as anatomical differences, varying degrees of impairment, and personalized therapy needs calls for adaptable, modular solutions that can be fine-tuned to individual users. The integration of machine learning and intelligent control systems offers promising pathways to address these complexities.
In conclusion, elbow exoskeletons are transitioning rapidly from experimental prototypes to practical, user-centric solutions. The convergence of soft robotics, advanced sensing technologies, and personalized control algorithms is driving the field toward more accessible and effective systems. By embracing interdisciplinary collaboration, focusing on affordability, and maintaining a strong commitment to user-centered design, future elbow exoskeletons can achieve seamless human-machine integration. These advancements hold the potential to restore independence, improve rehabilitation outcomes, and significantly enhance the quality of life for individuals with upper limb impairments around the world.
Author Contributions
Conceptualization, C.S.A.S. and M.D.; methodology, C.S.A.S.; formal analysis, C.S.A.S., M.D. and M.M.; investigation, C.S.A.S., M.D. and M.M.; writing—original draft preparation, C.S.A.S., M.D. and M.M.; writing—review and editing, M.M.; visualization, C.S.A.S., M.D. and M.M.;.; supervision, M.M. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the European Union by the Next Generation EU project ECS17 “THE - Tuscany Health Ecosystem” (PNRR MUR M4 C2 Inv. 1.5, CUP B63C22000680007, Spoke 9: Robotics and Automation for Health).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| EMG | Electromyography |
| IMU | Inertial Measurement Unit |
| DOF | Degree of Freedom |
| UCL | Ulnar Collateral Ligament |
| RCL | Radial Collateral Ligament |
| WHO | World Health Organization |
| PLA | Polyactic Acid |
| TSA | Twisted String Actuator |
| SMA | Shape Memory Alloy |
| sEMG | Surface Electromyography |
| SEA | Series Elastic Actuator |
References
- Pehlivan, A.U.; Sergi, F.; Erwin, A.; Yozbatiran, N.; Francisco, G.E.; O’Malley, M.K. Design and Validation of the RiceWrist-S Exoskeleton for Robotic Rehabilitation after Incomplete Spinal Cord Injury. Robotica 2014, 32, 1415–1431. [Google Scholar] [CrossRef]
- Wu, Q.; Chen, Y. Adaptive cooperative control of a soft elbow rehabilitation exoskeleton based on improved joint torque estimation. Mechanical Systems and Signal Processing 2023, 184, 109748. [Google Scholar] [CrossRef]
- Chen, T.; Casas, R.; Lum, P.S. An Elbow Exoskeleton for Upper Limb Rehabilitation With Series Elastic Actuator and Cable-Driven Differential. IEEE Transactions on Robotics 2019, 35, 1464–1474. [Google Scholar] [CrossRef] [PubMed]
- Park, S.J.; Park, C.H. Suit-type Wearable Robot Powered by Shape-memory-alloy-based Fabric Muscle. Scientific Reports 2019, 9, 9157. [Google Scholar] [CrossRef]
- Sambhav, R.; et al. An Integrated Dynamic Closed Loop Simulation Platform for Elbow Flexion Augmentation Using an Upper Limb Exosuit Model. Frontiers in Robotics and AI 2022, 9, 768841. [Google Scholar] [CrossRef]
- Missiroli, F.; Lotti, N.; Xiloyannis, M.; Sloot, L.H.; Riener, R.; Masia, L. Relationship Between Muscular Activity and Assistance Magnitude for a Myoelectric Model Based Controlled Exosuit. Frontiers in Robotics and AI 2020, 7, 595844. [Google Scholar] [CrossRef]
- Gull, M.A.; Bai, S.; Bak, T. A Review on Design of Upper Limb Exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef]
- Perrelli, M.; Lago, F.; Garofalo, S.; Bruno, L.; Mundo, D.; Carbone, G. A critical review and systematic design approach for innovative upper-limb rehabilitation devices. Robotics and Autonomous Systems 2025, 183, 104835. [Google Scholar] [CrossRef]
- Javed, O.; Maldonado, K.A.; Ashmyan, R. Anatomy, Shoulder and Upper Limb, Muscles. Available online: https://www.ncbi.nlm.nih.gov/books/NBK482410/ (accessed on 18 May 2025).
- Olsen, B.S.; V|sel, M.T.; Søjbjerg, J.O.; Helmig, P.; Sneppen, O. Lateral collateral ligament of the elbow joint: Anatomy and kinematics. Journal of Shoulder and Elbow Surgery 1996, 5, 103–112. [Google Scholar] [CrossRef]
- Dragusanu, M.; Guinet, N.; Suthar, B.; Baldi, T.L.; Prattichizzo, D.; Malvezzi, M. A 3 Degrees-of-Freedom Lightweight Flexible Twisted String Actuators (TSAs)-Based Exoskeleton for Wrist Rehabilitation. IEEE Robotics and Automation Letters 2025, 10, 6520–6527. [Google Scholar] [CrossRef]
- Eastman, J.; White, H.; Evans, J.; Augsburger, S.; Wallace, J.; Riley, S.; Iwinski, H. What is the minimum torque required to obtain passive elbow end range of motion? Gait & Posture 2022, 93, 235–239. [Google Scholar] [CrossRef]
- Anam, K.; Al-Jumaily, A.A. Active Exoskeleton Control Systems: State of the Art. Procedia Engineering 2012, 41, 988–994. [Google Scholar] [CrossRef]
- Bardi, E.; Gandolla, M.; Braghin, F.; Resta, F.; Pedrocchi, A.L.G.; Ambrosini, E. Upper limb soft robotic wearable devices: a systematic review. Journal of NeuroEngineering and Rehabilitation 2022, 19, 87. [Google Scholar] [CrossRef] [PubMed]
- Thøgersen, M.B.; et al. User Based Development and Test of the EXOTIC Exoskeleton: Empowering Individuals with Tetraplegia Using a Compact, Versatile, 5-DoF Upper Limb Exoskeleton Controlled through Intelligent Semi-Automated Shared Tongue Control. Sensors 2022, 22, 6919. [Google Scholar] [CrossRef] [PubMed]
- Guatibonza, A.; Solaque, L.; Velasco, A.; Peñuela, L. Assistive Robotics for Upper Limb Physical Rehabilitation: A Systematic Review and Future Prospects. Chinese Journal of Mechanical Engineering 2024, 37, 69. [Google Scholar] [CrossRef]
- Koh, T.H.; Cheng, N.; Yap, H.K.; Yeow, C.H. Design of a Soft Robotic Elbow Sleeve with Passive and Intent-Controlled Actuation. Frontiers in Neuroscience 2017, 11, 597. [Google Scholar] [CrossRef]
- Waheed, Z.A.; et al. Control of Elbow Rehabilitation System Based on Optimal-Tuned Backstepping Sliding Mode Controller. Journal of Engineering Science and Technology 2023, 18, 584–603. [Google Scholar]
- Rahman, M.H.; Rahman, M.J.; Cristobal, O.L.; Saad, M.; Kenné, J.P.; Archambault, P.S. Development of a whole arm wearable robotic exoskeleton for rehabilitation and to assist upper limb movements. Robotica 2015, 33, 19–39. [Google Scholar] [CrossRef]
- Taal, S.R.; Sankai, Y. Practical Design of Full Body Exoskeletons - Stretching the Limits of Weight and Power. In Proceedings of the Proceedings of the Third International Conference on Biomedical Electronics and Devices. SciTePress - Science and Technology Publications, 2010, pp. 133–138. [CrossRef]
- Achilli, G.M.; Amici, C.; Dragusanu, M.; Gobbo, M.; Logozzo, S.; Malvezzi, M.; Tiboni, M.; Valigi, M.C. Soft, Rigid, and Hybrid Robotic Exoskeletons for Hand Rehabilitation: Roadmap with Impairment-Oriented Rationale for Devices Design and Selection. Applied Sciences 2023, 13. [Google Scholar] [CrossRef]
- Hosseini, M.; Meattini, R.; San-Millan, A.; Palli, G.; Melchiorri, C.; Paik, J. A sEMG-Driven Soft ExoSuit Based on Twisted String Actuators for Elbow Assistive Applications. IEEE Robotics and Automation Letters 2020, 5, 4094–4101. [Google Scholar] [CrossRef]
- Wei, W.; Qu, Z.; Wang, W.; Zhang, P.; Hao, F. Design on the Bowden Cable-Driven Upper Limb Soft Exoskeleton. Applied Bionics and Biomechanics 2018, 2018, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Xiloyannis, M.; et al. Design and Validation of a Modular One-To-Many Actuator for a Soft Wearable Exosuit. Frontiers in Neurorobotics 2019, 13, 39. [Google Scholar] [CrossRef]
- Ismail, R.; et al. Soft Elbow Exoskeleton for Upper Limb Assistance Incorporating Dual Motor-Tendon Actuator. Electronics 2019, 8, 1184. [Google Scholar] [CrossRef]
- Mobedi, E.; Kim, W.; Momi, E.D.; Tsagarakis, N.G.; Ajoudani, A. A Soft Assistive Device for Elbow Effort-Compensation. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2021; pp. 9540–9547. [Google Scholar] [CrossRef]
- Mobedi, E.; Kim, W.; Leonori, M.; Tsagarakis, N.G.; Ajoudani, A. Design and Control of an Assistive Device for Elbow Effort-Compensation. IEEE/ASME Transactions on Mechatronics 2023, 28, 3446–3457. [Google Scholar] [CrossRef]
- Mobedi, E.; Hjorth, S.; Kim, W.; De Momi, E.; Tsagarakis, N.G.; Ajoudani, A. A Power-Aware Control Strategy for an Elbow Effort-Compensation Device. IEEE Robotics and Automation Letters 2023, 8, 4330–4337. [Google Scholar] [CrossRef]
- Popov, D.; Gaponov, I.; Ryu, J. A preliminary study on a twisted strings-based elbow exoskeleton. IEEE World Haptics Conference Proceedings, 2013; 473–484. [Google Scholar] [CrossRef]
- Kim, Y.G.; Little, K.; Noronha, B.; Xiloyannis, M.; Masia, L.; Accoto, D. A voice activated bi-articular exosuit for upper limb assistance during lifting tasks. Robotics and Computer-Integrated Manufacturing 2020, 66, 101995. [Google Scholar] [CrossRef]
- Paterna, M.; Gisolo, S.M.; Benedictis, C.D.; Muscolo, G.G.; Ferraresi, C. A passive upper-limb exoskeleton for industrial application based on pneumatic artificial muscles. Mechanical Sciences 2022, 13, 387–398. [Google Scholar] [CrossRef]
- Nassour, J.; Zhao, G.; Grimmer, M. Soft pneumatic elbow exoskeleton reduces the muscle activity, metabolic cost and fatigue during holding and carrying of loads. Scientific Reports 2021, 11, 12556. [Google Scholar] [CrossRef]
- Lee, D.; Song, B.; Park, S.Y.; Baek, Y.S. Development and Control of an Electro-Hydraulic Actuator System for an Exoskeleton Robot. Applied Sciences 2019, 9, 4295. [Google Scholar] [CrossRef]
- Palli, G.; Hosseini, M.; Melchiorri, C. Experimental Evaluation of Guided Twisted Actuation. IFAC-PapersOnLine, 2016. [Google Scholar] [CrossRef]
- Kapsalyamov, A.; et al. State of the Art Assistive Powered Upper Limb Exoskeletons for Elderly. IEEE Access 2017, XX. [Google Scholar] [CrossRef]
- Park, S.J.; Choi, K.; Rodrigue, H.; Park, C.H. Fabric muscle with a cooling acceleration structure for upper limb assistance soft exosuits. Scientific Reports 2022, 12, 11398. [Google Scholar] [CrossRef] [PubMed]
- Tiboni, M.; Borboni, A.; Vérité, F.; Bregoli, C.; Amici, C. Sensors and Actuation Technologies in Exoskeletons: A Review. Sensors 2022, 22, 884. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.H.; et al. Design of a Knee Exoskeleton Using Foot Pressure and Knee Torque Sensors. International Journal of Advanced Robotic Systems 2015, 12, 112. [Google Scholar] [CrossRef]
- Neťuková, S.; et al. Lower Limb Exoskeleton Sensors: State-of-the-Art. Sensors 2022, 22, 9091. [Google Scholar] [CrossRef]
- Copaci, D.; Martin, F.; Moreno, L.; Blanco, D. SMA Based Elbow Exoskeleton for Rehabilitation Therapy and Patient Evaluation. IEEE Access 2019, 7, 31473–31484. [Google Scholar] [CrossRef]
- Park, D.; Natali, C.D.; Sposito, M.; Caldwell, D.G.; Ortiz, J. Elbow-sideWINDER (Elbow-side Wearable INDustrial Ergonomic Robot): design, control, and validation of a novel elbow exoskeleton. Frontiers in Neurorobotics 2023, 17, 1168213. [Google Scholar] [CrossRef]
- Dežman, M.; Asfour, T.; Ude, A.; Gams, A. Exoskeleton Arm Pronation/Supination Assistance Mechanism With A Guided Double Rod System. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids); 2019; pp. 559–564. [Google Scholar] [CrossRef]
- Vitiello, N.; et al. NEUROExos: A Powered Elbow Exoskeleton for Physical Rehabilitation. IEEE Transactions on Robotics 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Gull, M.A.; et al. A 4-DOF Upper Limb Exoskeleton for Physical Assistance: Design, Modeling, Control and Performance Evaluation. Applied Sciences 2021, 11, 5865. [Google Scholar] [CrossRef]
- Kim, B.; Deshpande, A.D. An upper-body rehabilitation exoskeleton Harmony with an anatomical shoulder mechanism: Design, modeling, control, and performance evaluation. The International Journal of Robotics Research 2017, 36, 414–435. [Google Scholar] [CrossRef]
- Popov, D.; Gaponov, I.; Ryu, J. Bidirectional Elbow Exoskeleton Based on Twisted-String Actuators. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Proceedings 2013, pp. 5853–5858. [CrossRef]
- Dragusanu, M.; Troisi, D.; Suthar, B.; Prattichizzo, D.; Malvezzi, M. Development of a Soft Actuated Glove Based on Twisted String Actuators for Hand Rehabilitation. In Proceedings of the 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob); 2024; pp. 1702–1708. [Google Scholar] [CrossRef]
- Dragusanu, M.; Troisi, D.; Suthar, B.; Hussain, I.; Prattichizzo, D.; Malvezzi, M. MGlove-TS: A modular soft glove based on twisted string actuators and flexible structures. Mechatronics 2024, 98, 103141. [Google Scholar] [CrossRef]
- Dragusanu, M. , 2025; pp. 21–96. https://doi.org/10.1007/978-3-031-84823-0_2.Exoskeleton. In Design of Soft–Rigid Devices for Rehabilitative and Assistive Robotics; Springer Nature Switzerland: Cham, 2025; pp. 21–96. [Google Scholar] [CrossRef]
- Dragusanu, M.; Saeed, A.; Guinet, N.; Troisi, D.; Prattichizzo, D.; Malvezzi, M. Development of the Modular Finger Elements of an Actuated Glove for Hand Rehabilitation. In Proceedings of the Advances in Italian Mechanism Science; Quaglia, G.; Boschetti, G.; Carbone, G., Eds., Cham, 2024; pp. 563–570. [CrossRef]
Figure 3.
Prototypes of the elbow exoskeletons. (a) Soft exoskeleton actuated by a cable-driven mechanism (Bowden cable), incorporating a force sensor for feedback control [23]. (b) The soft wearable exosuit utilizing a cable-driven actuator (Bowden cable), also integrated with a force sensor for motion assistance [24]. (c) A Soft elbow exoskeleton employing a motor tendon actuator, equipped with an infrared sensor, capable of both flexion-extension and supination-pronation movements [25]. (d) An elbow exoskeleton actuated by shape memory alloy (SMA) wires, supporting both flexion-extension and supination-pronation [40]. (e) The Lightweight exosuit with an inertial measurement unit (IMU) sensor, actuated via Bowden cable for motion assistance [6]. (f) "Carry" a pneumatic elbow exoskeleton that uses force sensors to provide assistive support [32].
Figure 3.
Prototypes of the elbow exoskeletons. (a) Soft exoskeleton actuated by a cable-driven mechanism (Bowden cable), incorporating a force sensor for feedback control [23]. (b) The soft wearable exosuit utilizing a cable-driven actuator (Bowden cable), also integrated with a force sensor for motion assistance [24]. (c) A Soft elbow exoskeleton employing a motor tendon actuator, equipped with an infrared sensor, capable of both flexion-extension and supination-pronation movements [25]. (d) An elbow exoskeleton actuated by shape memory alloy (SMA) wires, supporting both flexion-extension and supination-pronation [40]. (e) The Lightweight exosuit with an inertial measurement unit (IMU) sensor, actuated via Bowden cable for motion assistance [6]. (f) "Carry" a pneumatic elbow exoskeleton that uses force sensors to provide assistive support [32].


Table 1.
Existing Elbow Exoskeleton Devices
| Name | DoF | Actuator | Sensor | Ref. |
|---|---|---|---|---|
| ExoSuit | FE | TSA | Force Sensor, sEMG | [22] |
| Soft Elbow Exoskeleton | FE | Tendon-Sheath Actuator | sEMG, IMU | [2] |
| ULIX | FE, SP | Cable-Driven Actuator (Bowden Cable) | Position Sensor | [3] |
| Soft Exoskeleton | FE | Cable-Driven Actuator (Bowden Cable) | Force Sensor | [23] |
| Elbow Exoskeleton | FE | Series Elastic Actuation | EMG Sensor | [26,27,28] |
| Elbow-sideWINDER | FE | Cable-Driven Actuator (Bowden Cable) | Torque Sensor | [41] |
| Exoskeleton Arm | SP | Cable-Driven Actuator (Bowden Cable) | Non Specified | [42] |
| Soft Wearable Exosuit | FE | Cable-Driven Actuator (Bowden Cable) | Force Sensor | [24] |
| Exosuit | FE | Cable-Driven Actuator (Bowden Cable) | IMU | [6] |
| NEUROExos | FE, SP | Electric Motor | Position, Torque Sensor | [43] |
| Elbow Exoskeleton | FE, SP | SMA | None Specified | [40] |
| Soft Elbow Exoskeleton | FE, SP | Motor Tendon Actuator | Infrared Sensor | [25] |
| Carry | FE | Pneumatic | Force Sensor | [32] |
| Soft Robotic Elbow Sleeve | FE | EPneumatic | Force Sensor | [17] |
| Elbow Exoskeleton | FE | TSA | Non Specified | [29] |
Notes: FE = Flexion-Extension, SP = Supination-Pronation.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



