
Submitted:
29 December 2025
Posted:
04 January 2026
You are already at the latest version
Abstract
If the invariance of light speed is absolutely universal in covariant space rather than contra variant space, the following researches and conclusions on general covariance would be so far as to catch up with very high probabilities and reliabilities. As has been verified, it is. General covariance is tested controversial after the investigations on gravitational redshift and acceleration. Further inspections on differential geometry indicate the opportunities of inequality of mixed derivatives of bases for the transformations between Riemannian spaces that will then lead to failure of the classical equations of Christoffel symbols, which is one of the reasons that causes controversies on general covariance. Even the negative form of time metric could be proved to be false setting in that transformations do nothing with the negative sign inherited from that of Minkowski space. Nevertheless, after discussions on transformations between original spherical space, distance expressed spherical space and Cartesian space, it has been seen that the distance factors of a spherical space are improper to be employed the metrics in general relativity, instead of that, the concepts of gravitational metrics were suggested. In fact, Christoffel symbols and base derivatives both are valid methodologies for analysis in a non-Euclidean space. The concepts of trajectory derivatives were carried out to define the derivations on trajectory of matter’s motions that could help to revise those equations and calculations. Measurable experiments on gravitational redshifts and accelerations have been carried out to support the theoretical results. Conclusions have been drawn that light speed keeps general covariance in gravitational fields but light energy momentum would not, may as well, the motions of massive matters in gravitational fields do not perform general covariance thoroughly. It is impossible to geometrize the gravity effects of massive matters with position depending metrics in that the variable velocities cannot be eliminated thoroughly. Consequently, inferences on kinematics and relativistic release were carried out, which have been forcefully verified in applications. With the ingenious proposition of the concept of gravitational metrics, the so-called geodesic equations have been falsified to be kinematic equations anymore. The conservativeness of light angular momentum has been discovered in most surprising form. Renovated solutions for light rays as well as massive matters have been carried out that forcefully impact the traditional methodologies on kinematics of trajectory and time delay because they are the correct interpretations of the realities. It should be highlighted that the exponential mass expressions could completely demonstrate energy variations in gravitational fields that help to create more general dynamic equations, especially that could lead to an irrelativistic solution of planet perihelion precession. In contradiction proof, the traditional solution must involve errors. Newtonian ballistic method was put forward to make numerical analyses on close-to-light-speed motions, and the invalidity of that method on light propagation could be seen as another support to the conclusions and inferences. Another forceful falsification on energy momentum conservativeness carried out in the discussions on the traditional treatment of time delay of close-to-light-speed particles, has thoroughly exposed the essential mistakes in the way of methodologies. Dynamic models of fluid planet rings were founded to interpret the evolutions of accretions of quasars and active galactic nuclei and the mechanism of relativistic release. The equation of relativistic release was developed after the conclusions and inferences. It is predicted that the peak release of an inflow is at 1.5 of gravitational radius and the peak luminosity of an accretion may locate at the position of about 1.33 of gravitational radius. Relativistic frequency shift interprets the mechanism of giant redshifts that predict the probability of observational redshifts might be up to a particularly higher level with respect to that have been observed in the past years. The width equations of emission and absorption lines indicate the mechanism and the positions of broad line regions and narrow line regions. It could be imagined that the relativistic emissions and relativistic absorptions with relativistic redshifts would have involved with fantastic mystery of intrinsic structures of matters that we know less.
Keywords:
general covariance
; general relativity
; gravitational redshift
; gravitational acceleration
; differential geometry
; covariant differential
; Christoffel symbols
; gravitational metrics
; trajectory derivatives
; Lagrangian
; energy momentum conservativeness
; light angular momentum
; geodesic line
; light ray kinematics in gravitational fields
; dynamics of massive matters in gravitational fields
; planet ring model
; relativistic release
; relativistic emission
; relativistic absorption
; relativistic redshift
; broad line region
; narrow line region
1. Preface
Einstein carried out the equivalence principle after discussing the equivalence of gravitational mass and inertial mass, and then he generalized the equivalent principle to create general relativity [1], which predicts same physics in curve space of gravity geometrization as that in no gravity space, that could be called general covariance. Theoretically, general covariance should include but not be limited in the performances of motion inertia, energy and momentum conservations as well as equilibrium states in complicated systems. However, we will find that quite amount of observations and evidences perform against general covariance.
It is believed that Riemannian geometry has been employed in general relativity for gravity geometrization [2]. But in fact, a transformation of a space does not really determine physics, what on earth the realities do. It is said that it is not the geometry but only the general covariance that matters. In fact, we could find out plenty of contradictions in classical theory of general relativity. It could be verified that even the motions of matter’s freefalling on the Earth cannot be well interpreted in the frames of the classical theory. So that it is time to sponsor a series of inspections and perceptions to insight into the topics on general covariance.
The gravitational redshift and gravitational acceleration are of the two typical effects that gravity acts on the light rays and massive matters respectively. Hence, researches on these topics would be greatly forceful to probe into the investigations and realizations on general covariance.
To discover realities is more important than to carry out new equations and theorems. I do not think these scientific investigations and perceptions will promptly reach the final truth, but any efforts and consistence involved would cast deep insight into realities that might bring about approaching, opportunities and probabilities.
2. Contradictions on Gravitational Redshift and Acceleration
2.1. Newtonian Gravitational Redshift
The equation of gravitational redshift can be drawn via Doppler redshift in a thought experiment that a light ray be emitted from the ceiling to the bottom or that is reversely performed from bottom to the ceiling, in a freely falling elevator cabin in a center source field [3]. It could be verified that any observer in the cabin would detect no frequency shift whatever the ways the light emitted. Suppose another observer outside the cabin keeping rest so that to have a relative velocity against the cabin, who will then detect a frequency shift other than the freefalling observer. What I want to say is that whoever freefalling will detect no frequency shift, no matter inside or outside the cabin. It is the relative motion that eliminates the gravitational frequency shift. Once the relative velocities catch up to a relativistic velocity, the gravitational frequency shift will then cannot be eliminated anymore.
As a light ray is down ward emitted from a cabin ceiling and at the same time the cabin is released to freely fall, the light front should spend a very short time interval to reach the bottom that
where, is the distance that the light ray travels from the start to the end which may approximately equal to the height of the cabin, is light speed.
Thus, the cabin velocity increase is
where is gravitational acceleration, which approximately equals to gravity case velocity does not reach relativistic level. We know it exactly has a minus value as its direction pointing to center source.
Doppler redshift is frequency shift between two observers that one has a relative motion to another, to detect frequency. Here the rest observer outside would have a relative velocity or to the cabin so that when they receive the light ray at the same time with the inner, the Doppler redshift could be calculated as
With the calculation of Doppler redshift, we know that the gravitational redshift has happened in the same value. Notwithstanding, I prefer to suggest a new methodology to get an equation for gravitational redshift, in which a proposal should be given that every photon at any position in a center source field could be assumed to have experienced a travel from a farthest point to the current position. This attempt may bring about more physical significances and comprehensive understandings.
A photon in one source field at position with frequency is set to have an imaginary primary frequency at a farthest point
where is Planck’s constant. NB, we are not talking about quantum character of photons so that photonic energy momentum mentioned refers to statistic quantities.
The corresponding dynamic mass comes from the mass-energy equation is
where is light speed.
Then the gravitational potential at position , especially as is in weak field with , could be written as
where is gravitational constant, is the mass of the center source with , is photonic mass at position , is the mean mass for the integral and it could be approximately replaced by case in weak field, and is Schwarzschild radius written as .
The current dynamic energy is the summation of primary dynamic energy and released potential
Case a light ray travels from positions to , as is shown in Figure 1, gravitational redshift happens.
Gravitational redshift could be defined traditionally as
Considering weak field effects, the gravitational redshift is
They are the forms of frequency shift of wave length based expression in weak fields, called redshift, where and are wave length and frequency tensors in contra variant space. Of course, a frequency shift could also be defined based on frequency. But we have been used to the forms previous in tradition. In the wave length based equation, redshift may go up to more than 1.0, while blueshift must have been limited in -1 to 0. Case in the form of frequency based equations, one could get blueshift greater than 1.0 but redshift limited in -1 to 0.
We could also carry out new forms of frequency shift for conveniences in special discussions, that a differential of wave length based redshift could be defined as
So that the integral form for to
Or a differential form of frequency based
So that
Considering the energy expression of the Eq. (509) in to the Eq. (11), one can gain the redshift result as same as the Eq. (9). But they are based on different definitions of frequency shift so that they would perform physical implications a little different.
It is said that after the definitions of Eq. (11) and Eq. (13) there is
We have seen that they have shown difference from traditional equations. But for small frequency shift, both the two integral equations could be use instead of traditional equation.
Moreover, with Eq. (7), the gravitational frequency differential
Then the differential frequency shift goes
This equation will be also taken into further discussions in the next sections. In following sections, the subscripts of frequency shift symbols will be neglected for convenience and in most cases we use the concept redshift to present frequency shifts.
2.2. Errors in the Equation of the So-Called Revisit Gravitational Redshift
A thought experiment has ever been employed to present the concept of the so-called revisit gravitational redshift [3,4], in which a pulse of light ray is supposed to be emitted from position 1, lasting for a time interval , and be received at position 2 within a time interval . The world lines of the of photons are shown in Figure 2. We then know that the two drawn lines are literally the world lines of the first photon and the final photon of the light pulse.
Believing that the two world lines besides the and are parallel, it is known that the time interval equals to that of . As the light frequency being inversely proportional to proper time interval , the proper forms of frequency ratio were written in some textbooks as [3,4]
where and are proper frequencies corresponding to position 1 and position 2, is time metric of Schwarzschild, if the value is defined negative initially it should be modified to be positive. The right hand side of this equation is an approximate result with Schwarzschild solution of metric in condition that .
Thus, the so-called revisit redshift is
It is seemingly that the revisit form of equation for gravitational redshift was worked out.
But there are quite many errors in above equations. (i) The two world lines belong to the first photon and the final photon respectively, thus they might be controlled by emitter, so that the time intervals between the two lines do nothing with any light frequencies. (ii) Any time intervals between neighboring photons could be randomly assigned, so that these intervals also do nothing with any light frequencies. (iii) Frequency of a photon is the reciprocal of its photonic period and is the intrinsic property of a photon, so that it is independent to its positions relating to other photons and any variation of the frequency will not change its position in the pulse of photons. (iv) Detections of frequencies must involve with wave numbers and time intervals together, while this equation has made a mistake by comparing time intervals only. (v) It is said that the time intervals and do nothing with the physical events of frequency shift, they are just the records of the physical event of emission and receiving.
2.3. Further Investigation into the Revisit Gravitational Redshift
Following the rules in classical frames, the tensor of light wave period is a tensor with upper index
where, is contra variant light period that is described by coordinate time, and is coordinate time lasting in which the number of waves may have traveled across a specific position. And the proper form of wave period
where, is proper time lasting for number of waves to cross the position. So that there is
where, is the first component of covariant time base, and it should be noted that the base is a vector but the component is not vector even though it is still a tensor. One can get more understandings for these expressions I would sponsor here and in followings.
In this way, we know that different values of the contra variant period and proper period correspond to a same physical issue of wave counting. Then it leads to a frequency tensor
We have seen that, is called covariant tensor traditionally, and is a proper tensor. This may have brought about confusions in that is actually covariant and yet has been named the name. I am not going to change the naming methodology thoroughly right now because that may cause more difficulties and sounds more trivial.
Generally, some pure one-order tensors seem to be infinite small quantities such as, but for , it is divided by , so that it is not an infinite small quantity. As for velocity tensors, they are really mixed tensors.
Theoretically, the covariant derivative of a frequency in a falling process into a center source can be written as
where, is Christoffel symbols.
We know that, as has been presented in Eq. (15), the contra variant derivative is
Let us calculate the Christoffel symbols in Eq. (23) that
The Einstein summation convention has been and will be adopt unless additional declarations.
It is found that only in the condition of there is a nonvanishing item in the bracket of right hand side of Eq. (25), so that with Schwarzschild metrics as is given traditionally, it turns to be
The covariant derivative will(27) be calculated to be
We could get an approximate solution for weak field that
As we have seen, it shows that the values of covariant redshift doubles that of the contra variant redshift.
2.4. Additional Discussions on the Thought Experiment of Freefalling Elevator Cabin
The thought experiment that observer in freefalling elevator cabin will detect no frequency shift is usually employed to discuss the equivalent principle for the support of general covariance. But in fact, that issue does nothing with covariance. It is just because that the gravitational redshift happens to be offset by Doppler redshift. In fact, this experiment is a comprehensive event that relates both to gravitational redshift and gravitational acceleration.
We know that in a freefalling cabin, freefalling observer will not detect any frequency shift no matter the light ray emitter is on the bottom or on the top to emit up or down to the receiver. Nevertheless, even if the light ray is not vertical, freefalling observer would also observe no frequency shift in the cabin.
For a case that a light ray is emitted to the top with an angle to the vertical line
The time interval for light ray from bottom to the top is
And the velocity increase of freefall cabin is
Then the velocity increase component at the direction of light ray
So that we get the Doppler redshift again as
In fact, the Doppler redshift for the detector in freefalling cabin could eliminate the gravitational frequency shift, even if the emitter is either outside of the cabin or with any low initial velocity. The real reason for non-detectable frequency shift in freefalling cabin is that the relative motion formed Doppler redshift just has a minus approximate value of gravitational frequency shift.
I prefer to put forward the case that the gravitational frequency shift cannot be eliminated by Doppler redshift. In the case that cabin has a relativistic initial velocity, the geometrical acceleration is not the total gravitational acceleration again as that in Eq. (319) as
Thus, for light rays passing across the cabin there is the Doppler velocity of detector
so that
While the gravitational frequency is still the form
so that in this case
We will see that in some situations in freefalling cabin one could detect frequency shift again, so that the thought experiment cannot support general covariance thoroughly. Of course, one can continue to argue that relativistic motion may bring about more sophisticated conditions on frequency shift.
2.5. An Investigation into Gravitational Acceleration
For a freefalling massive matter in gravitational field, the component of the velocity at the direction of radius of center source is
where, is number one component of vector of moving distance, in this case it is .
There is the covariant derivative at one of coordinate direction
Because , and , where is the nonvanishing component of the base . Thus, the covariant derivative by is
where, is the contra variant acceleration of the matter, is light speed.
NB, accelerations we have mentioned and will discuss refer to geometrical accelerations, which will be something different from gravity , in that the latter sometimes may also be called gravitational accelerations in some writings but in fact matters may not experience accelerating as that.
With the equation of Christoffel symbols
case in this equation, there is . Then considering the condition of , it is
In this condition, only in the case of there is the nonvanishing item in the bracket of right hand side, so that with Schwarzschild metrics and in traditions there is
And with , Eq. (40) turns to be
As a matter freefalls on to the earth, its acceleration could be calculated to be
Thus, there is the weak field solution
What deserving of more discussions is that the metric designated to be negative form might have involved with errors. In fact, metrics are defined to interpret transformations between contra variant space and covariant space for the geometrical and physical quantities, such as time and distance intervals, velocities, curvatures and covariant derivatives etc. One can find that the minus sign in the equation of invariant distance is not of the transformation. The correct form of must be of positive value. We could have more detailed discussions about this issue in next sections.
With the revised metrics and , would be drawn to be a negative value with respect to that in Eq. (43), one can calculate the covariant derivative in Eq. (44) to be
This result is the real consequence of the equation of Christoffel symbols so that it sounds more reasonable with respect to the result in Eq. (28). But the calculations have revealed more problems in that the entire calculation shows irrelevant with velocity itself, while at the start we expected a variation depending on velocity in the equation of covariant derivatives.
2.6. Discussions and Controversies
Now we have got more complex results that the revisit gravitational redshift calculated doubles that of contra variant value while covariant acceleration of freefalling goes to zero in traditional methodology. The latter seems to fit with general covariance but the calculations might have involved with wrong defined metrics. The revisit gravitational redshift solved in the way of covariant derivation goes contradictory to that of classical solution. Moreover, the negative value of traditional involves problems that have led to the result of zero acceleration in traditional method and then revised could lead to a nonvanishing value, that deserves of further discussions in next sections.
In general, the covariant derivative of light frequency should go nonvanishing in the view of general covariance. Someone may argue that the frequency is not a tensor, but that makes no sense because light frequency is the reciprocal of its wave period which involves with time coordinate.
What I urgently want to say is that these discussions are not enough. The most significant problem is that, the items in original covariant differentials in Eq. (44) show that matter’s velocities expected to be multiplied with the base differentials, have been calculated to do nothing with the realistic velocity. We should know that the multiplied items in Eq. (39) originally indicate base variation ratio multiplied with the very tensors, but the final equation has skipped the influence of velocity that does lead to contradictions, and the time speed is a virtual velocity which might have been abused. These contradictions really bothered me until it is occasionally gone through one day, that the real problem is deeply hidden in the equations of Christoffel symbols.
Notwithstanding, a differential of velocity is the differential of that on the trajectory of matter’s motion. Thus, the covariant time derivatives of something moving in rest fields cannot be treated directly as ordinary derivatives anymore as in Eq. (40). I am going to carry out detailed discussions on trajectory derivatives in next sections so that to interpret covariant time derivatives correctly.
3. Theoretical Investigations on Christoffel Symbols
3.1. Classical Equations of Christoffel Symbols
Christoffel symbols have been defined in the equation
There is nothing wrong with the definition in that the derivative of a base must have a direction and so that to be written as a linear combination of the total bases. The key problem is what the Christoffel symbols are.
In this and following sections, all symbols of vectors and matrix would be boldly written while their components and that of other quantities may be simply written, no matter they are tensors or not.
In most conditions, Christoffel symbols could be discussed by the derivation of metrics as
For the derivative forms with alternative indexes mathematically, there will be
In the case the so-called torsions are set zero, the summation of the previous two equations minus the last one that
Generally, Eq. (50) to Eq. (52) could also be rewritten as the original forms
We will find that in some conditions the torsions do not always equal to zero. It is said that the mixed derivatives of bases and do not always equal, and then the Christoffel symbols with mixed subscripts and do not always equal, so that the Eq. (54) might be invalid in those conditions.
3.2. The Inequality of Christoffel Symbols of Mixed Subscripts
In Riemannian differential geometry, the equality of Christoffel symbols of mixed subscripts is usually adopt the doctrine. But no forceful researches could provide reliable supports for it to be applied in general relativity. The truth is that the problem of mixed derivatives of bases in a pseudo Riemannian space are far different from the problem of normal mixed derivatives of a 3-dimensional surface in Euclidean geometry.
We could find out the truth that in the deduction of in Eq. (43), has been used instead of so that to gain . But we can easily calculate that and are not equal. It is said that the Eq. (43) has been calculated to be a nonvanishing value of , which really relates to time derivatives of bases that must be determined to be zero in rest field originally. We might have found out the problems.
3.2.1. Coordinate Transformations and Bases
Any points in a Riemannian space of Riemannian manifold of dimension has a neighborhood homeomorphic to a subset of Euclidean space of dimension , so that there must be probable maps between the neighborhoods and the corresponding subsets. It is just to say that the coordinates of any points in Riemannian space could be expressed with the coordinates of corresponding points of Euclidean space, and reversely. If a part or the entire of a Riemannian space are continuous and differentiable, Euclidean coordinate lines could be drawn in the part or the entire of the Riemannian space. On the other side, coordinate lines of Riemannian space could also be drawn in the corresponding Euclidean space. For convenience, the Riemannian space could be called covariant space, and the corresponding Euclidean space could be called contra variant space. A contra variant space is curved in the view of its covariant space, and the covariant space is also curved in the view of contra variant space.
It is obvious that transformations of spaces are actual coordinate transformations. These transformations could happen between covariant space and contra variant space, as well as they could happen among homeomorphic Riemannian spaces. Coordinate transformations may perform in the way with unequal metrics as well as the way with equal metrics.
The more effective method for coordinate transformation is to define bases and distances for spaces. Two examples would be presented firstly for definitions and for following discussions.
- Example 1: Bases of Riemannian manifold of super surface
The derivative vectors of 3-dimensional surfaces were usually employed to form bases in classical differential geometry. The curve space has an extra dimension than a plane space that could be called the super surface. The Riemannian manifold of the super surface in the 3-dimensional space would have a homeomorphic Euclidean space in the space . The coordinate lines and in contra variant space could be transformed to be and in covariant space, while , and in covariant space be transformed to be , and in the space as shown in Figure 3 and Figure 4.
The super surface could be determined by a vector function
And the function could also be written as
or
At the same time, the contra variant space could be defined by
There will be varieties of available ways to develop the expressions of bases and distances. I prefer to put forward the followings might as well.
The way in super space:
In super space, the differential has 3 components
That of differential could be simplified to be 2 dimensional because it just locates in the space
To define a set of covariant bases for a position in covariant space by
It should be pointed out that, in some publications, coordinate and vector symbols have been used reversely like and , which would have brought about confusions.
In covariant space, the differential expressed by with covariant bases
Differential distance could be defined as
If the bases are orthogonal, there is
We have seen that the covariant bases are defined in covariant space to help contra variant coordinates to form covariant distances.
There are more complexities for a transformation between a super surface in 3-dimensional space and that the 2 covariant bases would have 3 components
Define the contra variant bases for a point in the plane that
The 3 contra variant bases all have 2 components as
The differential expressed by in contra variant space
Of course, one can create transformation matrix to perform the relationship between and directly.
The distance could be defined as
If the bases are orthogonal
One could imagine that this condition you cannot give the relationship of metrics that equals to , in that the covariant bases have 3 components and contra variant bases have 2.
The way in tangent space:
Consequently, the issues could be simplified in tangent spaces. At a position in the covariant space, there is a neighborhood which will be labeled with coordinate lines of and , at the same time at the position , there is a corresponding neighborhood in contra variant space labeled with coordinate lines of and , as shown in Figure 5 and Figure 6. Generally, coordinate lines could be set orthogonal. In most of publications, and were seen as and , but one should realize that the difference really matters.
One could define the differential vector in covariant space
As a result, the bases
Again, there is the distance
The differential keep the form as Eq. (63), so that the contra variant bases could be defined as
Also, there is
In this case, the relationship of metrics go harmonized that equals to . It should be pointed out that the ways of expressions of bases are all equivalent except that the substitutions of coordinate lines and might have hidden some information of super surface, so that I would like to make analysis within super space in most cases.
- Example 2: Bases of Riemannian manifold of equal dimension
As a Riemanian manifold has equal dimension with its contra variant space, it could be called equal dimension manifold. A plane space maps to a plane space could be taken for granted, as shown in Figure 7 and Figure 8.
A differential vector in covariant space is
The differential vector in contra variant space is
Thus, the definition of contra variant bases could be
To express with
Also, there is the definition of covariant bases
So that the expression of by should be
Something different is that a covariant base has 2 components
And a contra variant base also has 2 components
In the case that bases are orthogonal, the distance
and
3.2.2. Inequalities of Mixed Derivatives of Bases
Now it is the time to carry out the first discussion on the inequality of mixed derivatives of bases. The mixed derivatives of bases are just special defined for bases alternative derivations. As transformation from contra variant space to covariant space is concerned, the covariant bases could be considered to be derivated by the coordinate lines in chain rule
where, and are the direction derivatives along the coordinate lines and in covariant space, and and are their differential lengths in covariant space, which could be called the covariant lengths. And there will be a setting that Einstein summation convention does not act on double and double .
It should be pointed out that, in most mathematics and physics, mixed derivatives being confirmed to be equal is because in the Eq. (89) and is incorrectly understood to be the differential length in covariant space , but they are really the lengths in contra variant space . That is the reason we have carried out the concept of covariant length and .
Thus, the mixed derivatives will be
and
Consequently 3 conditions could be focused on:
- Condition 1:
If there is an equality between the first items of the two equations that
For example, in the super surface, the mixed derivatives of course have the equality just as the equality of normal mixed derivatives of a 3-dimensional surface in a Euclidean space.
In this case and if there is another equality for the last items of the two equations that
Then that must come to the conclusion
Otherwise, that depends.
It should be pointed out that and do not equal in general conditions because they have different directions and, in most cases, they are usually set orthogonal, so that if that equality of Eq. (93) happens, it asks for
We will see that in some cases it is really well satisfied.
- Condition 2:
Most special if
that indicate the first items of the two equations are not equal, but at the same time if the total equations are still equal that
We will still obtain the equality that
- Condition 3:
This is the condition after the previous two conditions and else to them. Generally if
No matter the first items of the two equations are equal or not, the mixed derivatives will perform inequality
Then, turn to the issue of geometrical influence that the inequality of mixed derivatives will cause closure errors [6,7]. I prefer to give a brief presentation. Consider a differential in a curve line coordinate system expressed by bases along different coordinate paths as shown in Figure 9 that
in path 1,
The irregular expressions of same symbols of integral variables and integral range could be adopted in special cases.
By Taylor’s approximation, it could be written as
We could also get the differential in path 2,
Trimming off the 3-order infinite small quantities, the difference of and is
There will be a closure error in close path if the mixed derivatives of bases do not equal.
This result let me think about the probable closure error in the thought experiment of emission and receive of a light pulse in gravitational field that has been mentioned in section 2.2. It could be proposed that two closed lines of line ABD and line ACD present two physical events in space . In Figure 10, the line ABD named path 1 could be imagined of the event for a photon emitted from position A to B and waiting for . Another line ACD named path 2 is of the event for another photon emitted from position C to D after a waiting for . A question could be asked for who are imagined waiting, never mind, it could be the world. It has been mentioned that it is believed . That is easily described that the two emission lines AC and BD are parallel in that the velocities of must be same for the two lines at same space positions A and C or B and D or whatever of corresponding positions. One can see one of the two lines is a copy of the other and experiences a vertical displacement.
It is natural to transform the path 1 of abd’ and path 2 of acd from the space to the space , as shown in Figure 11. We know that light speed is invariant in covariant space, so that the emission lines in space must be parallel and straight lines ab and cd. On the other side, we have known that
so that
If it is believed that as discussed previous, there must be closure error between path 1 and path 2 in covariant space that
This is really a paradox that the two path arrive at the different points d and d’ in covariant space while they are the same point in contra variant space. The inequalities of mixed derivatives of bases could provide the geometrical interpretations, but the problem is whether and how does it perform realities. Is that new surprise of light? The topics we are mainly focusing on have not been linked to this issue. I just carried out the problem in curiosity.
3.2.3. Verifications and Discussions
- Example 1: Original polar coordinate system to Cartesian coordinate system
A polar coordinate system that we are familiar with is a transformation from its contra variant space of original polar system , as shown in Figure 12 and Figure 13.
A position in contra variant space could be expressed by vector
and the differential is
Corresponding position in covariant space, will be expressed by
and the differential is
In the contra variant space, the differential distance between two positions could be defined as
The system we have used to is the really the Cartesian coordinate system that has been transformed from original polar space with
The bases
so that
Thus, there is the covariant distance
The mixed derivatives of bases
We have seen the mixed derivatives got equal
It could also be verified in Eq. (90) and Eq. (91) that
and
The vector is
Because is radius length , and is arc length , then
Thus, the first item of Eq. (121) is
The second item is
And the first item of Eq. (122)
The second item
so that
and
Obviously there is
and
but the mixed derivatives are equal totally that
Again, we have got the equality of mixed derivatives. But to our surprise is that this solution really subject to condition 2. It is said that the first items of Eq. (121) and Eq. (122) do not equal. One of the reasons in this case, is that there is no super surface.
- Example 2: Original spherical surface coordinate system to Cartesian coordinate system
A transformation original spherical system to Cartesian coordinate system are shown in Figure 14 and Figure 15, in which
Differential distance is
And the coordinates of covariant space will be expressed with
The original spherical coordinates could be transformed to Cartesian coordinates,
The bases could be defined as
and
Thus, there is the covariant distance
The derivatives
so that
It could also be verified in Eq. (90) and Eq. (91) that
and
The vector is
Because is arc length , and is arc length , then
Thus, the first item of Eq. (144) is
The second item is
And the first item of Eq. (145)
The second item
With Eq. (149) to Eq. (152) we found that
and
so that there is
One can see that this is of condition 1.
- Example 3: Original spherical coordinate system to Cartesian coordinate system
A transformation from original spherical system to Cartesian coordinate system has been shown in Figure 16 and Figure 17, in which
Differential distance of original spherical space is
And the coordinates of covariant space will be expressed with
The original spherical coordinates could be transformed to Cartesian coordinates,
Their differentials are
and
They could be seen as of the transformations from , , of the vector .
Thus, the invariant distance could be written as
The bases could be calculated as
and
Thus, the invariant distance could also be calculated as
The derivatives
so that
It could also be verified in Eq. (90) and Eq. (91) that
and
The vector is
Because is radius length , is arc length , and is arc length , then
Thus, the first item of Eq. (170) is
The second item is
And the first item of Eq. (171)
The second item
With Eq. (176) and Eq. (179) we found that
but there is
One can also calculate that
At the end we can obtain
One can see that one of them is of condition 1 and the others of them are of condition 2.
- Additional discussion: deformed bases of example 3
If one of the bases in example 3 be set deformed as
where, is a function of coordinate .
One will find that the derivatives
and
while and will still keep the results as in Eq. (168), that will cause
This result reminds us that the same performance would have happened in gravitational space time that will be put into discussions in next section.
4. Metrics and Covariant Derivatives in Space Time
4.1. Metrics in Pseudo Riemannian Space
Pseudo Riemannian space is raised for the description of space time for general relativity after Minkowski space [8,9] in which the invariant distance is
The invariant distance in general relativity with Schwarzschild solution is
so that there could be a brief expression of invariant distance
in which , , , .
As we have discussed, they are not correct definition of metrics. In fact, that is one of the reasons that cause the wrong result of acceleration calculation in Eq. (44).
Former researchers have made efforts on the topics, for example, the concept of plural employed to reform the base [6]. But plural bases for relativity is not a good idea. Another treatment is to define , which looks like more reasonable [7]. But we know that the negative sign of the first items of Eq. (189) does not come from transformations of spaces or coordinates. It is a kind of mathematical and physical setting.
The issues we are talking about are of transformations of tensors as time and distance differentials, covariant derivatives and curvatures that interpret the variations between covariant tensors and corresponding contravariant tensors. Those transformations do nothing with negative signs. The Christoffel symbols and metrics are employed to present the derivatives of bases and they do nothing with negative signs yet, because that a derivative of a base by a corresponding space time coordinate just relates to a transformation of time or distance differentials that do nothing with minus signs.
In fact, the distance factors and in Eq. (189) have involved in metrics in Eq. (190) and Eq. (191) is improper.
In order to clarify how does a contra variant space transformed to a covariant space that influence the definition of metrics, I want to present various of transformations from different forms of contra variant space to specific covariant space. The invariant distance under Schwarzschild solution could be taken for example.
- Condition 1:
The transformation from contra variant space of original pseudo spherical space to covariant space of distance expressed pseudo spherical space will be taken into investigations. The spaces have been labeled with their tangent spaces for convenience. We know that the metrics are of the multipliers that transform the contra variant distance to covariant distance. So that the invariant distance is
in which , , , .
We have seen that the original pseudo spherical space is not of same unit coordinate system in that in Riemannian geometry the distance could be written as
This is a definition of insufficient physical value.
The differentials of space time in contra variant space
For covariant space, the differentials will be
Thus, the covariant bases
Obviously, we are not satisfied with the definitions in this kind of contra variant space. It will be interesting to step to the next condition for the consideration.
- Condition 2:
There could be a transformation from contra variant space of distance expressed pseudo spherical space to the covariant space of distance expressed pseudo spherical space so that to have same unit coordinate system in contra variant space. So that the invariant distance is
in which , , , .
Thus, the contra variant space will be of the same unit coordinate system in that the distance could be written as
The differentials of space time in contra variant space
For covariant space, the differentials are the same as the previous
The covariant bases could be presented as
- Condition 3:
There could be a transformation from contra variant space of original pseudo spherical space to the covariant space of Cartesian space , in which , , are of spherical coordinates , , , the contra variant coordinates and , , are of Cartesian coordinates , , , the proper coordinates. It is not convenient to give the parametric equation for those proper coordinates directly just as it is difficult to give a specific value for the covariant coordinate , however, there are the different vectors and .
The last three components of are of transformation of the differentials of , , as that in Eq. (160) to Eq. (162)
The invariant distance could be calculated as
in which , , , .
The covariant bases could be presented as
They could be calculated furtherly that
It could be verified that
One can study one more condition for a transformation from contra variant space of distance expressed pseudo spherical space to the covariant space of Cartesian space , that could give briefer metrics and more complex bases. I prefer to cast further more discussions and seek for a few preliminary conclusions for the subsequent studies.
In the three conditions, we have seen the differences for metrics and bases from contra variant spaces to covariant space. In fact, the transformations are of that from a specific coordinate system transformed to another. Obviously, if a coordinate differential of contra variant space is directly expressed by angular quantity solely such as or , the velocity tensor must be an angular velocity rather than linear velocity. Consequently, if the metrics and bases are employed to calculate descendant tensors such as Christoffel symbols, curvatures or exactly the linear velocities, that could lead to confusions and errors.
The negative time metric in traditional methodologies must be revised to be positive value to avoid false results as that in Eq. (44). We have realized the minus sign of the first item in the equation of invariant distance is of physical settings, that do nothing with gravitational transformation.
The coordinate setting of and for covariant space would have equivalent metrics and invariant distances. But they would have different bases, in most cases, the Cartesian coordinate system for covariant space of one source fields is too trivial and not necessary.
In general, Christoffel symbols and metrics are just employed to present the calculations of bases, they are not necessary. Bases could take the effect in every equation composed of Christoffel symbols and metrics. We will see the same answer while bases be employed instead of Christoffel symbols and metrics in the discussions in next sections. In fact, the calculations based on bases could be taken for the verifications to that based on Christoffel symbols and metrics. That is to say if any differences happen in the verifications, there must be something wrong in the calculations.
In general relativity, it could be suggested to simplify the presentation that we only focus on the gravitational transformation. It is a transformation from contra variant space of distance expressed pseudo spherical space to the covariant space of distance expressed pseudo spherical space that just has been performed in condition 2 in previous. Thus, the transformations of any tensors only present gravitational effects. The invariant distance could be expressed as
In which, . The most particular, must be a positive quantity.
These metrics could be called the gravitational metrics, while the other metrics could be called total metrics and the metrics before gravitational transformation could be called original metrics or pseudo spherical transformation metrics.
For gravitational metrics of Schwarzschild solution, the bases are
It could be calculated that
so that
This is of the condition 3 that we have discussed in Section 3.2.2. One can also calculate the inequality of mixed derivatives of bases of total metrics.
That reminds us that the inequality of mixed derivatives of bases will cause closure errors in space time, which would be left for more discussions elsewhere.
4.2. Calculations on Bases, Tensors, and Their Derivatives
Tensors could be recognized as the quantities relating to coordinates in space time. Case a tensor varies in space time, the variation ratio could be inspected by derivation. The simplest tensor is position vector . You have seen that we are going to use middle subscriptions to express coordinates and tensors in covariant space time, though they are rarely mentioned in most of references. To study its variation in space time, one could define the distance variation ratio to form the bases
For any tensors involved with bases, such as a proper tensor
where, is the number component of the total contra variant tensor.
The derivatives of the tensor are
The differential of a proper tensor could be defined to be covariant differential labeled as , and then the derivative to be covariant derivative
In these equations, the middle subscriptions of proper tensors maybe neglected conventionally so that it is expressed as . And the tensor could be called proper tensor because has already been named covariant tensor conventionally. Because or is just a component, we could imagine that there must be the total quantity. That will be expressed to be or for convenience. Sometimes, row forms of expressions of vectors are employed to interpret components which are equivalent to the column forms.
Bases sometimes look like one-order tensors since they have a single index in expressions. But in fact, they really are two-order mixed tensors. For example, a component of contra variant base of collinear transformation, i.e., coordinate lines of contra variant space and covariant space coinciding, could be written as
where the contra variant base and proper coordinate differential are all labeled with middle index .
So that the base really is
If =0 case , we could use instead of for convenience, as it is the only nonvanishing component.
For any one order tensors there is a transformation
But for two order tensors, there are some things different. For example, a component of contra variant velocity could be transformed from proper velocity
We know that it may be seen as one-order tensor in practice, but it is really two order tensor.
As for whole contra variant velocity as , that would not be worked out by direct vector product. In fact, it could be composed independently by and .
where, and are components of and , which are of the simplified forms of and as we have discussed on Eq. (218) previously.
As has been shown in Eq. (221), it is impossible to get the value from and the latter is zero. Notwithstanding, a velocity is a derivative on matter’s trajectory rather than a direct derivative. That will be further discussed in next sections.
4.3. Derivation via Christoffel Symbols
Christoffel symbols were put forward to perform geometrical relationship that takes similar effects with that of bases. They are defined in the equations [3,13]
Taking the first one for example, the purpose of the equation is to consider the derivatives to be a function of bases, so that the right hand item is really a kind of trivial types. In the summation items, just act as direction indicators that would give out whole basic vectors of entire dimensions. And then, provide the coefficients of all directions. It is said, this definition has just provided an error-free frame for the functions of derivatives. It means there may be redundant designs for the coefficients.
Since there is the probability of inequality of mixed derivatives of bases, we should define a specific sequence for subscripts of Christoffel symbols. For the traditional reasons, will be defined as the coefficient of a derivative of that is derivated by , on a direction of , that requires unexchangeable subscripts of .
We know that a covariant differential is exactly a differential of a proper tensor
This highlightable concept is essentially carried out to perform general covariance.
The contra variant form also performs the same covariance as that
You might have found that the tensor component that has been expressed by a total tensor is exactly partial expression rather than a whole expression. It is just of traditional operations. One can of course carry out whole form expression of expressed by with base matrix . But too more renovations in a performance will bring about more reading difficulties. So I prefer to present equations in traditional forms as far as possible.
A component of contra variant tensor transformed from covariant one
Its derivatives is
so that
It is easy to study those covariant derivatives for covariant tensors
We have seen that the methodologies of Christoffel symbols and the derivation directly from bases are actually equivalent treatments that present the covariant derivatives. That of course may be use to inspect the problems of equations of Christoffel symbols. Since we have known that part of Christoffel symbols with mixed subscripts do not equal in space time, it is necessary to do more discussions.
It is convenient to discuss the case that a space is defined by orthogonal bases. In practice, metrics are usually taken in to Christoffel connections analysis. For a series of bases , there is the metric
For whole orthogonal coordinate spaces,
The nonvanishing derivatives
Then the equation could have nonvanishing value, that
Then
This equation could be called revised equation for Christoffel symbols in general relativity. In the equation, it also needs for the to get nonvanishing.
For a result, this equation could be verified in a covariant derivative directly as that in Eq. (227) that
It should be pointed out that the Christoffel symbols are not necessary because that the issue only started from derivatives of bases, as consequences they surely might be taken the place by the operations of bases.
4.4. Derivatives on Matter’s Trajectory
The calculation of time derivatives may cause to another mathematical abuse in classical theory. For a one source field, it could be seen as rest field in general. Thus, a time derivative of a field quantity should be zero. Case a matter moves in a space, it is the issue that the matter changes its position in a time interval and forms a motion trajectory. In this condition, to learn the acceleration is to study the position variation rather than the field variation. It is one of the reasons that make errors in covariant derivative calculation in Eq. (43), in that the direct derivative has been used instead of trajectory derivative.
It is valuable to reclassify tensors to be field tensors and motion tensors, thus field tensors may vary with field while motion tensors should vary both with field and matter’s motion. For example, the bases only depend on gravitational field, while velocity of a matter may vary due to positions changed. For example, case in one source field, a space derivative of a base may be nonvanishing, but a time derivative of a base must be zero, nevertheless, the base relating to the matter’s moving in space time would vary because the coordinates varied on trajectory.
A trajectory of motions of a matter should be a directed curve line in a space, from the start to the end. It is said that the trajectory must be single parametrical curve line. Theoretically, the parameter maybe natural i.e., the line it passes through, and as same it could be time that the motion experienced. What worthy of highlight is that these parameters are simultaneous. That is said a record of the parameter corresponds to a sole record of another. The parameter indicates the sequences.
It is no harm to discuss the trajectory vector as a curve line in contra variant space, in that the trajectory is a function of single variable. There is
where is the length of trajectory.
It is said that the trajectory is of
A tensor variation ratio during a time interval on trajectory could be defined to be trajectory derivative that
For example
where, Einstein summation convention does not act on double because trajectory is just a single line. The differential length d is the differential of matter’s trajectory, so that is the covariant differential of tensor between two neighbourhood positions on the trajectory. Thus, the so-called trajectory derivative is really a kind of line derivative that is derivated by a parameter of trajectory.
It should be noted that a trajectory of matter’s motion indicates time sequences corresponding to positions on the trajectory. There is the substantial difference between trajectory derivatives and primary derivatives. A differential on trajectory is the distance interval that a matter has past across, so that the velocity is a trajectory derivative
As mentioned above, bases are defined by direct derivatives such as
where, is a proper coordinate differential, so that it is middle labeled.
For the velocity, the differential is exactly defined on a trajectory of a matter, so that there is the probability that
It is said that velocity tensor itself is literally trajectory derivatives. Trajectory derivatives of general tensor should be labeled for discrepancy. For example, the bases along a trajectory in rest field
while direct derivatives with
Eq. (238) could be calculated as
and is also time derivative, and there is
where, Einstein summation convention does not act on double .
Thus, we have seen the difference between a trajectory derivative and a primary derivative.
On the other hand, the value of matter’s velocity
so that
where, Einstein summation convention does not act on double , and is the direction cosine on the direction of vector line , so that is of component of on that direction and is vector form of so that it could also be written as equivalently in this equation specially for matter’s motion on the trajectory.
It could be expanded to be
The expression in component forms could also be worked out as
The expression in the way of Christoffel symbols as
In rest fields, there will be , so that . It is said that for one source field, a trajectory derivative could be based on a real trajectory that
and
It should be highlighted that the trajectory derivatives could also be defined in distance derivatives as
which just performs a special appearance of trajectory derivatives.
For free falling trajectory, it is
Trajectory derivative is derivative on a curve line in space time. Sometimes it is presented with time because that the time variable is used in the parametric equation. Christoffel symbols in the equations owe to derivatives of space differentials rather than trajectory differentials. We will see that the concept of trajectory derivative help to describe frequency shift and acceleration, as well as to falsify the concept of geodesic line in section 8.2.
5. Theoretical Verifications on Gravitational Redshifts and Accelerations
Because of the inequality of Christoffel symbols of mixed subscripts, the classical Christoffel symbol equations could not be used any more in the theory of general relativity. The covariant derivatives in gravitational field should be considered in their correct forms.
5.1. On Gravitational Redshifts
Taking light propagation at vertical direction for granted, a distance derivative of contra variant frequency is exactly trajectory derivative
where, the first item of right side of the equation is contra variant derivative that has been drawn in Eq. (15).
It is sure to consider the tensor of frequency and its derivative to be vectors, but in traditions it is not of a rare necessity. It has been mentioned that Christoffel symbol were employed correctly with the form as has been shown in Eq. (26). As a result, it will lead to a real answer
The covariant derivative will be calculated to be
The approximate solution for weak field is that
It is said that the solution Eq. (27) is confirmed again, and it reveals that the covariant redshift is approximately double of the contra variant one in weak field, which departs from general covariance.
Notwithstanding, one can also make another derivative as
For light rays at that trajectory, . It becomes
The first item of right hand side can also be transformed to be
so that
5.2. On Accelerations
One can take matter’s freefalling for example to study the acceleration in gravitational fields. We have pointed out that accelerations we discussed refer to geometrical accelerations. The entire contra variant acceleration is the derivative of whole contra variant velocity as that
And entire covariant acceleration is a pure covariant derivative
One may find that some tensors have been labeled with detailed middle index hence they may help to provide explicit expressions, in which the symbol / is employed to divide the middle upper and middle lower indexes.
With the relationship between covariant derivatives, it could be drawn that
To study the covariant derivative expression with Christoffel symbols, there is
With , it becomes
With , , and , it is
With Eq. (265), we obtain
One can find that we have use and in the calculation of , rather than that has been used in Eq. (44). As we have discussed, the value of is really of zero.
As has been said that covariant derivatives could also be developed in a direct way without Christoffel symbols
It could be found that this equation has been far different from the Eq. (44), because errors in Christoffel symbol equation have been eliminated and at the same time the concept of trajectory derivate help to calculate an acceleration in right way. These discussions have presented further verifications for the revised equation of Christoffel symbols of Eq. (233).
By the way, it is interesting to take some discussions on some trivial concepts such as and the covariant form of massive matters. Since and are the velocities of contra variant time and proper time but not the real velocity of light
and
Then their derivatives are just the accelerations of time coordinates that
while
so that
As light propagation at a direction of a radius is concerned, we know that light speed keeps invariant in covariant space, so that there is
Case discussing the performance of contra variant light speed, with invariant distance, there is
and then the light speed in contra variant space will be
where, positive is set instead of a negative as has suggested previous.
Then the acceleration
With Eq. (268) the covariant derivative is
Of course, with Eq. (268) and Eq. (265), we could obtain the result only by a judgment that
6. Experimental Verifications on Gravitational Redshifts and Accelerations
Every tensor involved with measurable quantities could have probabilities to be performed in practice with measured quantities to verify their theoretical expressions. In space time, space intervals and time intervals are all measurable quantities so that they surely could be employed to perform the space and time dependent tensors.
The methodology of the so-called revisit gravitational redshift encourages me to sponsor a realistic analysis method to further verify the general covariance, which will present solutions all based on physical events of realities. Physical events always have substantial existence so that they can help to create irrefutable conclusions. We know that physical events may be record both in contra variant space and covariant space that might provide different values for physical quantities, but both of them actually represent the same physical realities.
6.1. On Measurable Experiments
Measurable quantities could be used to describe physical events, which may be coordinate independent or not. Coordinate independent quantities of course show invariance in physical events in different spaces, such as wave numbers, which could be record as images or texts at specific times and positions. However, coordinate dependent quantities measured in site may really depend. For examples, distance measurements not only depend on in-site space coordinates but also depend on the in-site rulers, so as well, time measurements also depend on both in-site time coordinates and the in-site clocks. We may imagine that the space rulers and clocks their selves maybe also vary. Logically, records of these quantities are recognizable even if they are in farthest distance to the bystanders.
Case a measurement equipment varies with time space, whether the measurement quantity measured is in contra variant space quantity or covariant space quantity? With general covariance, it has been believed that rulers will shrink when they go closer to the center source corresponding to the space interval to become shorter. And also, it has been expected that clocks will go variant corresponding to their dynamic conditions.
However, after those inspections in previous sections, we know that general covariance does not work in some circumstances. Energy and momentum of a matter may not keep covariant in covariant space, while light speed may keep covariant spectacularly. On another side, our discussions may have led to a theoretical inference that matters may experience relativistic emission when they go to a center source and then shrink because of the variation of energy structure. That could be called covariant deformations.
Once we measure space and time intervals at a position, maybe they are not committed to be contra variant quantities or covariant quantities, because our clocks and rulers may vary uncommitted. Anyway, we deem we can measure. In another word, we could indeed measure something so that they might relate to the corresponding ones. Thus, it is not harmful to suppose one of the series of measurable quantities could be measured in following discussions, for example, the contra variant distances or contra variant time intervals. And then they will be valid to be transformed from one to another. That will help us to do more analysis for comparisons and discussions.
6.2. Measurable Verifications for Gravitational Redshift
For the issue of redshift, we are going to sponsor the physical events of wave number counting. It is known that light frequency investigation should be accomplished by indirect techniques and sometimes it may come out with deviations. But it is supposed here that the wave number of the light is countable, or it is believed that light wave could be seen and record. This assumption actually may not do harm to our understanding to the realities, because that indeed will not change the realities and the events of wave counting in that the measurements themselves are also physical processes.
The event of wave number counting could be specified as the record of a number of waves to past a position in a time interval, and it could also be simplified to be one wave corresponding to a time lasting of the light ray propagating a wave length distance. On another side indirectly, one can get wave number by measuring wave length, based on the assumption of invariant light speed. But the apparent light speed might be variable so that the indirect method is not a good idea.
If there is a photon propagating from position 1 to position 2 in a one source field as shown in Figure 18, which correspond to coordinates and ,
The wave number counting events should be carried out at the time that the photon passes the position 1 and position 2. In very short time and , we will count the corresponding wave number and . It should be pointed out that the time intervals here do nothing with the time intervals in Figure 2 in Section 2.2, in that they belong to different physical events that the ones we are talking are of the records of wave counting events and the ones in Figure 2 are of the records of pulse emission and receiving events.
Since the frequencies should be calculated as
Redshift has been defined as
With the measurable records, it could be rewritten as
In the event of wave counting, wave numbers are invariant in both contra variant space and covariant space, but the time intervals and will vary to be and . In fact, every physical event keeps the only one event, whereas the different describing metrics lead to different results in the different spaces.
Naturally, gravitational redshift in covariant space is
where, this redshift symbol labeled with revisit is because it corresponds to that one named in classical equations.
As we know,
It turns to be
As in a field of a center source, the metrics take the forms of Schwarzschild solution, the equation will be drawn as
We know that the in Eq. (284) could have been measured in the physical event of wave number counting that of course equals to that in Eq. (9), so that
Thus, the covariant redshift in weak field is obtained
It is said that, the revisit gravitational redshift is double of that of contra variant one.
As the equation of contra variant redshift is concerned, we know that it could be of course drawn by counting two wave numbers in two equivalently specified time intervals. For example, set which are measured at positions of and , then and should represent the difference of frequency without time intervals. So that
We know that and present the wave numbers with respect to .
As for revisit redshift, one will still get different covariant time intervals because the metrics go varied. Thus, it is always doubled of the previous.
It should be pointed out that in some experiments on gravitational redshift, only one timing clock was designed for time interval measurement. In this case, a wrong setting of proper time intervals may be taken into consideration, for example some sole clock timing experiments, so that the experimental redshift may be presented as
where, is base component at clock position of or or any position others to them.
We can find out those completed experiments observations [14,15,16] on gravitational redshift will be easy to be verified to have only worked out the results of contra variant frequency shift.
Of course, one can calculate the real proper time intervals by time interval transformation between sole timing position and frequency shift positions. That will finally help to work out revisit gravitational redshift as have discussed.
6.3. Measurable Verifications for Acceleration
6.3.1. Measurable Quantities and Measurable Acceleration
Firstly, I prefer to rise a controversy of a free falling on the Earth that if a matter freefalls from rest with velocity as well as by nature, we do know that it will move quite faster with velocity after traveling a distance in a time interval because of gravity. In traditional theory, we know that the proper velocity . Considering the weak field effect, there is . Hence comes the controversy that the covariant acceleration must be great than zero because the matter has started from rest to a quite apparent motion. That is really contradicted with the principle of general covariance with a requirement of zero covariant acceleration. Nevertheless, considering that and are still non-relativistic velocities, it is easy to estimated that the accelerations are also approximately equal that . The following works of so-called realistic verifications in this section are exactly to be sponsored to solve these controversies thoroughly.
A freefalling test with initial velocity is going to be put forward, in which a matter freely falls to source center from a position to a position as shown in Figure 19. Once the velocities at the two positions are measured, the average values could be estimated with the velocities difference and the interval distance. Considering the condition on the surface of the Earth, a freefalling with a rarely big velocity and a rarely small traveling would be performed. For example, a velocity of more than 10000 m/s, could be seen as a constant accelerating motion even in covariant space, in that a covariant derivative is expected to be linear with velocity.
It is supposed that contra variant distances and time intervals are measurable as has been discussed previous. Based on the measurements, velocity at position 1 could be written as
where the and are measured distance and time intervals when the matter goes by the position , so that they are both tensors of contra variant space. For reasons of convenience their bracketed sub indexes here are only employed to represent positions.
As well as that at position 2
Because the velocity at position 2 is the result of acceleration, it could be written in integral form
where, the mean acceleration is the integral point value, and is time interval for the matter traveling from to .
So that the mean acceleration is
On the other hand, with covariant bases there are the relationships of contra variant quantities and proper ones
One can use the mean metric to calculate the proper time intervals from position 1 to positon 2
where the is the value at integral point, and it is suggested to be evaluated approximately as following in weak field
The proper velocities
And the integral relationship in covariant space that
And also, we get the mean covariant acceleration with Lagranian mean value theorem of integration that
It could be rewritten as
It is of course the measuring forms of covariant acceleration of a freefalling. And then it could be compared to that of contra variant one.
We would like substitute the equation of contra variant velocity 2 of Eq. (296) into this equation. That is
It could be transformed to be
Here we have got the transformed form of covariant acceleration of freefalling.
Nevertheless, with Lagrangian differential mean value theorem, we can write down the differential form as
Or the form of reverse bases
Thus, by the way, another kind of proof of differential analysis of the Eq. (269) or Eq. (270) has been completed, in the way of measurable experiment. It should be highlighted that the accelerations we have discussed refer to geometrical accelerations.
6.3.2. Examples
Some terrestrial experiments are going to be put forward, that matters with initial velocity freefall in vacuum circumstance with in 1000m height to the ground. Both at the start point position 1 and end point position 2, the matter’s velocities will be measured. And of course, the space and time intervals between position 1 and 2 that depend on the so-called geodesic line will be measured together so that to calculate the mean accelerations.
Some basic data of the Earth have already been tested certainly, so that we can take the standard value for our experiments, such as the total mass of the Earth , and the position on the ground could be assigned to have a radial coordinate . We could also take the gravitational constant , with the light speed thus the gravitational radius will be calculated as
With Newtonian equation and Schwarzschild’s solution, some positional data could be listed in Table 1.
So far as we have discussed, the accelerations and are really geological quantities, and now it is necessary to make an extending study.
We know that all kinds of interactions could be seen as momentum exchanges between matters, as that
For the convenience, some quantities discussed in this section will not be marked with tensor index anymore.
In conditions of low velocity motions, the theory of special relativity indicates small mass variations, thus
For the cases of high velocity motions, one should take a total analysis. Now the total acceleration could be defined
It is said, the total acceleration includes mass variant acceleration and velocity variant acceleration, and the latter also could be called geometrical acceleration.
With a momentum variation, kinetic energy will vary a difference
At the same time, the mass energy equation of differential form is
Thus, there will be
To be divided by time differential, that will lead to the expression of acceleration
Now one can define a coefficient of geometrical acceleration
In one source field, single acting gravitational geometrical acceleration is
where is the total acceleration of gravity.
We will see that geometrical acceleration declines as velocity goes up to a relativistic level, and it goes to zero as velocity closely catches up to light speed.
If a matter is accelerated from rest, the total energy includes rest part and kinetic part
where is relativistic mass and is rest mass.
We know that in special relativity there is
Back to Eq. (320), there is
Then the total kinetic energy
Case is a small value, would be close to 0.5, so that
On the occasion of freefalling the variation of kinetic energy
Again with Eq. (316) the energy difference in an experiment
Thus, there is
Considering in experiments and is quite big, the difference of kinetic energy could be written as
so that
Thus,
Unfortunately, this solution cannot come up with a higher accuracy than that
After then, we are going to sponsor series of freefalling experiments. Contra variant accelerations and covariant accelerations for every position are easy to calculate. While measurable covariant acceleration could be obtained with measured distances and time intervals via Eq. (305). But it is convenient to calculate with Eq. (306), in that the latter is just a transformation of the previous. And in this equation, space intervals would be gained with Newtonian equations and time intervals with Eq. (331) for convenience. One may argue that the measured quantities might come from calculation. That doesn’t matter, because the equation has been verified for hundreds of years, therefore it is sure that the calculated quantities have equal value with that by measuring. And then the mean covariant acceleration will be taken to compare with the contra variant acceleration calculated with Eq. (319) and covariant acceleration calculated with Eq. (267) or Eq. (270). Calculation results have been listed in Table 2 and Table 3.
7. Conclusions and Inferences and Their Applications
7.1. Conclusions
Previous discussions will lead to two conclusions for matters’ motions in gravitational fields:
1) For light: Light speed keeps general covariance in covariant space, but light frequency keeps conservation in contra variant space.
2) For massive matters: Massive matter’s velocity does not perform general covariance, but it will keep conservation in contra variant space.
These conclusions indicate the partial breaking of general covariance and the failure of gravity geometrization. In fact, gravity geometrization has succeeded in motions of light rays but failed in that of massive matters. One of the reasons is that covariant derivatives of massive matter’s velocities depend on the values of velocities corresponding, while velocities are variable even in covariant space, so that it is impossible to geometrize the massive matter’s gravity only with source-depending metrics.
7.2. Inferences
The conclusions are really different from classical theory of general relativity and they will then lead to natural inferences. I prefer to focus on the inferences on kinematics and relativistic release:
1) For kinematics: General covariance goes break by a large range. During the motions in gravitational field, all matters, including light rays, will keep energy and momentum conservation in contra variant space rather than that in covariant space. Only for light rays they may keep velocity invariant in covariant space, but their energy and momentum will still keep conservation in contra variant space. Energy momentum conservations are the conservations under the condition of gravitational potential conversions. It is said that there is only one exception in realities, the light speed invariance, which will lead to the validity Lagrangian of light ray propagation. While for massive matters, Lagrangian goes invalid. At any positions in gravity fields, massive matters always have opportunities to be accelerated up to and keep velocities close to absolute-light-speed.
2) For relativistic release: Since apparent light speed may vary in gravitational field, that will bring changes to interaction efficiency between and within particles of massive matters so as to influence fine structures. For electromagnet forces, there will be of variations of momentum exchanges. It is also reasonable to predict that the speed of gluons relating to the strong interactions is general covariant like that of photons. On the other side, these interactions keep energy momentum conservations at the same time. Therefore, case massive matters inflow enough distance in gravitational fields, they might get to excited state and release energy, which could be called relativistic release, just as excited electrons in atoms might do. The difference is that relativistic releases might be releases experiencing thoroughly exciting of the matters both in intrinsic structures and exterior structures, including exciting of electrons. Matters may also experience covariant deformation after relativistic release because of new equivalent state. Moreover, relativistic emissions and absorptions may reveal the mystery of intrinsic structures just as the exciting electrons in atoms might do.
7.3. Applications
Detailed discussions on some applications will be sponsored consequently that will greatly support the conclusions and inferences.
1) On kinematics: General covariance and physical quantity conservativeness are of the handles to rectify the classical equations, especially the principle of moment and mass energy conservations. It would be seen that those efforts to employ the geodesic equation or covariant derivatives to build kinetic equations have already gone failed, in that covariant derivatives might be nonvanishing. Renovated solutions on light ray propagations and massive matter’s motion as applications might provide forceful verifications on conclusions and inferences.
2) On relativistic release: The concept of equivalent state would be carried out to estimate the energy exceeding for inflow matters so that to discuss energy release, which will then lead to relativistic redshift of emission and absorption. Equivalent state also relates to relativistic deformation that might perform another kind of covariance. Researches on relativistic release will bring about fantastic interpretations on tremendous observations on quasars and active galactic nuclei.
7.4. On Conservativeness
If a physical quantity being conservative in covariant space or contra variant space is to say the quantity keep invariant at any positions. Consequently, the forms of conservative quantities must be expressed in subsidiary conservatives. It should be highlighted that a position in gravitational fields refers to a definite physical reality no matter how does it be described in covariant space or contra variant space. Thus, a quantity at a position always refers to a definite physical quantity whatever described in any coordinate space. A physical quantity in a gravitational field could be conservative or not in one of those descriptions. For example, light speed is a conservative quantity at any positions in covariant space but it is variable in contra variant space. If a physics expressed by conservative quantities, one could give their values directly, else if not, the variations should be performed by coordinates of space time. In a word, the physical quantities defined should perform physical realities.
Momentum and energy keep conservations in contra variant space is something special that they are keeping conservations after considerations of the momentum and energy exchanges with gravitational fields.
A quantity conservative in a space may be formed with subsidiary quantities in another space or not. We will see in next section that the angular moment of light rays keep conservation in contra variant space but the expression would be written in form of covariant light speed.
8. Kinematics and Dynamics
8.1. The Most Important
The second Newtonian law interprets the mechanism of accelerative motions of massive matters so that to form the dynamics. Case in the conditions that matters have relativistic velocities, forces acting on matters will cause not only the variations of velocities but also the variations of matter’s mass. It should be highlighted that a force really is of a statistic quantity rather than an essential physical quantity. In fact, a force is just a performance of exchange of momentum, as well as mass energy at the mean time. Thus, that physics could be called the relativistic dynamics.
But for light propagations, the second Newtonian law will not take effects anymore. Even in the case that a force is vertical to a light ray, we will see that the second Newtonian law remains invalid. That is the reason we suggest the concept of kinematics that others to the concept of dynamics. If we persistently employ the concept of dynamics, it should be a new one.
No matter the space time been determined by what kind of metrics and labeled by what kind of coordinates, it is just a methodology for descriptions for physical events. None of them would have priorities. Physics is on earth depends on its nature rather on spaces defined. The most important is the conservative principles in realities.
It is easy to imagine that geodesic line could be employed for the solution of kinematic trajectories of matters, because general relativity expects conservations in curve space. But we will find out that geodesic equation or covariant derivatives have not really taken effect in the solving of the kinematics in the past century. We know the reason is that covariant derivatives may be nonvanishing so that those imposed settings of vanishing covariant derivatives might cause discrepancies with respect to realities.
Most of methodologies for kinematic trajectories published were based on the so-called Lagrangian. Besides these conditions, contra variant angular momentum conservation has been used in all those solutions. One can imagine that this condition is apparently contradicted with general covariance. In fact, it is always the greatest reason for me to persist in this issue with more efforts.
Finally, the Lorentz covariance is also a kind of constraint condition, since it has been involved in the settings of Minkowski space and pseudo Riemannian space.
8.2. Falsification of the Employment of Geodesic Line for Kinematic Equation
We have drawn the conclusion that covariant accelerations of matters in gravitational fields may be nonvanishing so that the geodesic lines which ask for zero value of the covariant derivatives cannot be employed to be the kinematic equation for matter’s motions. We will find great many faults in those equations with which they declare the kinematic equations coming from geodesic lines.
And then, with , the so-called kinematic equation, were finally drawn as
where, and are set constants.
To one’s surprise, it could be found that the metric and both have been set positive in Eq. (334) to Eq. (337). That is far different from that in any other areas.
It seems that the kinematic equation has been created by covariant derivatives. But it should be pointed out that Eq. (334) to Eq. (338) have gone wrong. Because we have discussed that the covariant derivatives could be nonvanishing in some occasions, so that there must be something wrong involved.
We have been told that the Eq. (333) is the equation of geodesic lines. In this equation, What kinds of differentials will be defined that determines the final forms of calculation deserve of more attentions. One can find out that in calculations above, they are defined as
We are going to sponsor investigations in two ways for a comparison. Firstly, might as well, a transformation from the original pseudo spherical space defined as to the distance expressed pseudo spherical space defined as , just as the same as previous discussions, could be put into considerations. For convenience, the invariant distance should be rewritten as
where, signs in the equation have been modified to traditional forms which are a little different from Eq. (332) and the metrics would be defined as , , , , in which all metrics have been set positive as has been discussed so that to lead to correct results.
In fact, this kind of transformation is to make analysis from original spherical space with unequal units of , , in demensions to the distance expressed spherical space with equal units of , , in demensions. That might cause a little confusions, but this treatment is to define as same as that in Eq. (334) to Eq. (337) so that for comparison. I would like make the comparison to show the correct methodologies for the calculations on covariant derivatives. The very important is that the covariant derivatives we are talking about are the derivatives of velocities on the trajectories of matter’s motions.
The Eq. (250) could be employed for the solution, so that the derivative components could be performed with and then
where, , and becase the result of time derivatives in rest fields, and with and , there will be an only nonvanishing item .
where, , and , and , so that there will be an only nonvanishing item .
where, , and and , so that there will be two nonvanishing items that and .
where, , and , and , so that there will be an only nonvanishing item .
We have seen that some errors in the Eq. (334) to Eq. (337) have been rectified. In fact, it is easy to find out calculation errors. If any the Christoffel symbol of =0, in that the bases we discussed are orthogonal.
Secondly, we are going to study another condition that the physical quantities could be transformed from the contra variant space of distance expressed space to the covariant space of distance expressed space . The invariant distance could be written as
Thus, , , , . As has mentioned previous, in this condition, only gravitational metrics has been considered in the expressions, and as result, these metrics will really make sense in physics. More surprising, this kind of settings would easily help us to verify the calculation previous. One may argue that this transformation has overcome Riemannian manifold definition because the contra variant space is not a . But on earth in mathematics, that doesn’t matter because we know that the space could map to a if you will. The derivation regulars are still available. Then the derivatives should be performed with Eq. (250) that
where, , and , and , so that there will be an only nonvanishing item .
where, , and , , , because that .
where, , and , , , because that . The has been calculated by chain rule is because the trajectory derivative is what a derivative on the parametric motion line.
where, , and , and , so that there will be an only nonvanishing item .
In comparisons of the previous two calculations, we could find subtle nuance in that they are settled by different and . But they have really given the equivalent results, in that both of them could be transformed to uniform covariant derivatives . The latter calculation is very easy to be done. The most important is that the comparison of calculations have verified the conclusions on inequality of mixed subscript Christoffel symbols. One could easily make a checking computation for the latter calculation so that to use the simplified expression of the latter to verified the solution of the previous. That will finally indicate the errors in classical theory, as well as that in Weinberg’s calculations on geodesic equations.
Many efforts [11,12,17] have been made to attempt to prove the conservative principles after the equation of geodesic equations. They attempt to show that
are of the results of the Eq. (336), and the Eq. (337).
It is easy to find that these works involve with errors. In comparison on the results of and in previous two kinds of strategies, we will find that these two derivatives do nothing with gravity influence, and they are just come from transformation of spherical coordinates so that any doctrines after that to form angular momentum conservative principle would be lack of supports. We will make further verifications in next sections that these two equations are all of false ones. In fact, the Eq. (350) is not a correct form of angular momentum, and the Eq. (351) does nothing with energy. We will see that, motion trajectories could be calculated based on neither zero covariant derivatives, nor the so-called the geodesic lines.
8.3. Classical Equations of Light Ray Deflection
It is indicated in some books that the Lagrangian relates to Euler-Lagrangian equation and geodesic equation [3,4]. It is trivial to continue the discussions on whatever of the origins. I will say that the Lagrangian for light rays is absolutely correct, because we will see that it is just the expression of composition of light speed components in covariant space. I think that many people may have realized the problems in the calculations of geodesic equation. Perhaps, it is the reason that the Lagrangian is employed for the equation of matter’s trajectories in more and more publications. In fact, the methodology of velocity composition could also be employed to solve the trajectory of massive matter’s motions. But it should be highlighted that the Lagrangian equation is not proper for massive matters, which will be presented in following discussions.
Incomprehensibly, traditional solving process for Lagrangian equations seem like to do nothing with geodesic line equation and covariant differentials. On the other side, we could find that those solved trajectories all involved with contra variant angular momentum conservation, which also indicates that the solved trajectories may be not real geodesic lines.
To take the problem of the light rays passing across the Sun for granted, as shown in Figure 20.
8.3.1. Classical Equations after Traditional Settings
It is expected in classical theories that for the motion of light rays, the Lagrangian is zero
where, Schwarzschild metrics has been concerned. Thereby, trajectory derivatives by proper time have been special expressed for conveniences as , and , which will also be employed in following expressions.
Because of the multiplier used, is really an equivalent contra variant angular momentum rather than a covariant one, so that this setting seems like to insert the contra variant conservation in. It is said that the setting of does not actually coincide with general covariance. Even so, we will find out that it is exactly wrong setting together with the setting of constant to have given not bad results, which may have performed two negatives making a positive.
Then the Lagrangian would be reformed to be
Setting , , and then , there is
Derivated by , it is
At a farthest position the right hand item goes to zero, then the equation will have a solution , where is a distance from solar center to the asymptotic line, that could be called asymptotic distance. Replacing the very small right hand item with the solution, there is
There is a particular solution
Then the approximate solution of Eq. (357) is obtained
For an infinite large , the is infinitesimal one, there is
Observational deflection of light rays passing by the edge of the Sun is
At the position and , there is
or
That will bring about contradictions for the setting of Eq. (353) that at peak point there is
while at a very far point, there is
It is said that the equations have been solved incorrectly. Might as well, we would find out an inevitable solution after the inappropriate setting of Eq. (353) in next section.
8.3.2. Errors Hidden in the Solving Process
It is obvious that a wrong setting has been made in Eq. (355), because in gravitational field, really varies with . In fact, the Eq. (352) could be solved directly only based on the setting of Eq. (353) as following.
Considering , the Lagrangian really is
or
It is really the composition of light speed in covariant space. Any equation that leads to is unacceptable, as that has been done in Eq. (355).
Transform the equation by multiplying a
If setting peak point radius as and setting the angular moment at that point , with , it becomes
To be derivated by , it is
With instead of , it becomes
Because, it could be solved as
One will obtain the solution of the equation as
At the peak point as , we will get the constant that
so that
And the setting of Eq. (353) has been well kept that
and
This is really the inevitable solution for classical equations but it is not a true result for realities. We have seen that the classical equations to have been solved to an answer Eq. (360) accurately up to the observation results is just caused by the wrong settings of the declared energy momentum conservations of Eq. (353) and Eq. (354). We will see in next sections that the angular momentum in Eq. (370) is not correct as well.
8.4. Momentum, Energy, and Angular Momentum Conservativeness
We have drawn the conclusion that light momentum keeps conservation in contra variant space rather than covariant space, and then of course, so does the light mass energy. In fact, apparent light speed or so-called contra variant light speed may varies in contra variant space, but light momentum and energy will not be affected by apparent speeds. In fact, neither geodesic equation nor the derivations of Lagrangian could help proving the Eq. (353) and Eq. (354), in that Eq. (353) and Eq. (354) are substantially not correct.
Considering a light ray goes a vertical distance on the Earth, one could gain the mass variation as
It could be called simplified equation of mass in gravitational field.
Light momentum could be expressed as
or the momentum square
Case in contra variant space, apparent light speed varies with position so that that speed cannot be used in expressions of light momentum directly. The invariant light speed could be employed to present invariance of momentum. Eq. (380) performs full variation with gravity by , which is the performance of momentum conservation. In fact, light momentum depends on frequency, just as does. If we ask more for a deep reason, that should be mass energy equation.
Case in covariant space, if light momentum will also be expressed by frequency, that will vary with bases additionally.
We know the Lagrangian
With Lagrangian substituted in conservative momentum square, it turns to be
or
As we have discussed, light speed cannot be directly composed in contra variant space but can be done in covariant space. This is a reason the Lagrangian is employed in conservative momentum square.
In one source fields, the momentum vector could be discomposed to be components of centripetal and tangent
or
Obviously, the tangent momentum relates to tangent velocity and centripetal momentum relates to centripetal velocity. It could also be inferred that the tangent component varies with the corresponding velocity, and so does the centripetal one.
So that there must be
and
In one source field, the angular moment conservation could be expressed as
It should be highlighted that we are talking about the moment conservation in contra variant space. It is amazing that the angular momentum should be expressed in the form of or rather than the form of , or we have seen that contra variant light momentum could be only directly composed in covariant form. The real reason is that the invariant light speed is just employed for the expressions by invariance.
The issues of light momentum have always been one of the controversies in physics for more than a hundred years [18]. The problem is the difficulty of assessing the light momentum in transparent materials between Minkowski’s equation [19] and Abraham’s equation [20]. To one’s surprise, we would have made the conclusion different from both of them, after the discussions in previous sections, because of Lorentz covariance.
Nevertheless, angular momentum brings about new surprises on it. We will find that the surprises not only have been picked up from the expressions, but also hide behind the kinematics of light propagations in gravitational fields. These efforts might bring about tiny contributions for the attempt to answer the question of Einstein about ‘What are light quanta?’ [21] I appreciate what Leonhardt has said that light continues to surprise [22].
8.5. Revisit Equations for Light Ray Trajectory
8.5.1. Renovation and Resolution
We have recognized that it is conservative principle that really controls the solutions. In fact, light rays in gravitational field may undergo mass energy variation.
As has mentioned previous, the light mass at the peak point is
And it varies at position
These two equations involve with the energy conservation in contra variant space rather than that in covariant space.
For a light ray passing by a one source field, there is the angular momentum conservation as
It should be highlighted again that the contra variant light momentum has been expressed by and which are of covariant space quantities rather than and of contra variant ones. In fact, it could be proved that and cannot be taken to form momentum conservation, if one takes efforts to have a try. That is because momentum variation depends on that perform the effect of gravity, or in another words, the gravity input energy into the . The invariant light speed employed reveals that light momentum variation really depends on frequency rather than real velocity, just as that light propagates in transparent materials. That perhaps is really surprise.
Considering the Eq. (390) and Eq. (391), Eq. (392) will lead to
Set . In weak field, the item , thus
I prefer to present the Lagrangian again
Define , so that . There is
Insert the Eq. (394) into Eq. (396), the latter becomes
With , it is
With , and it turns to be
We have seen the similar form of Eq. (356), but this equation comes from the settings of the real conservative principles.
Make a secondary order derivation for the equation,
Considering is very big value so that the last item is very small so that the solution will be close to horizontal line at near positions, the following equation could be presented
It could be solved to be
It is a horizontal line with a perpendicular distance to the center of the Sun.
The right item of Eq. (400) could be replaced with the simple solution, because the deviation is also very small. So that the equation could be reformed to be
Case at positions far from , the right item could be an approximation of the right item of Eq. (400) to close to zero.
Once again, we could obtain the solution for the differential equation that
And then the deflection angle
Case , there is
Because it becomes
or
To verify the momentum conservativeness that
At a position
It seems that we have got the same results as that of classical equations. But the truth is that the solution is the results after the conclusions of momentum and mass conservations which completely others to that of classical theory and at the same time the assumptions of Eq. (353) and Eq. (354) are thoroughly given up. It is said that the angular momentum keep conservation rather than that in previous. This solution is real solution.
The most important is that the real kinematics of light propagation has been worked out.
8.5.2. Detailed Discussions on the Coordinates of the Light Ray Trajectory
The trajectories of light ray in gravitational fields have more details behind the previous solution. More discussions may help to discover more realities.
Further discussions are going to be sponsored to make more detailed analysis for understanding of two issues, positions and angles.
The first one is to recognize the various kinds of lines. The most important line is the real light ray that is emitted from a farthest star to the observers on the Earth. This line should be curved as it goes closely to the Sun. Prolonging the straight parts of the light ray, one will gain the crossed straight lines, the asymptotic lines of light trajectory. They will be parallel to the two radial coordinate vectors left and right. There is another important line is the straight line from farthest star to the observer, that will present the real star direction from observer to the star.
The second one is to recognize those angles. is the second coordinate of farthest point on the light ray. Because the Earth is far enough to the Sun, the elevation angle of observer view line could be seen as . And because the star is very very far from the Sun, the angle between straight line to the star and horizontal line could be also seen as . Thus, the total deflect angle of is approximate . They could be shown in Figure 21.
For the coordinate of the Earth, , where is astronomical unit, the simple solution could be used
where, is second coordinate of the Earth.
Thus, there is
Because we know that , where is solar radius, so that
The height of the horizon line to light ray
It is difficult to get a not bad accurate solution. However, we can turn to discuss the value of instead. For the approximate of , it could be gain
in the upper height .
There is a very small difference between real ray trajectory and asymptotic line, the . For the condition that light rays run from farthest position to the position they pass by the Sun, there is the equation after angular momentum conservativeness
NB, is perpendicular length to asymptotic line, which is the moment distance for farthest positions, and only in approximate cases, it could be seen as . is peak point radius, and it need not be determined to be in these discussions theoretically.
Then it is easy to obtain
Peak difference between and is
It is more difficult to investigate such a fine distance in practice that not only because of the observational accuracy but also due to the coordinating of the peak point of light ray. The development of very-long-baseline interferometry have the capability of measuring angular separations and changes in angles as small as 10-4 seconds of arc [23]. That shows probabilities for the quite good accuracy for fine angle measuring. This issue perhaps cannot be solved easily.
We can study the right branch of asymptotic line with an overplayed as shown in Figure 22.
There is the asymptotic equation as
or
Case , we will see that the top point is just a little bit higher than horizontal line
Case is not very close to , considering is very small, an approximate form of sine function is
Thus, the deformed equation of asymptotic line could be written as
It should be mentioned that the equation or is a horizontal line with a distance to the Sun center.
For the case that a light passes closely by the edge of the sun, there might be some influences from solar corona. It is a good idea to left a distance from the edge, for example, the position of or even further.
8.5.3. A Wrong Treatment for Light Propagations
If the angular momentum conservativeness would be insisted for light propagations as
It is seemingly that presents the contra variant angular velocity of photons which is expected to correspond to contra variant angular momentum. And moreover, it could be argued to take as expressions of contra variant angular momentum, that will exactly lead to conservation break as gravitational redshift is concerned.
Now for the equation Eq. (424), there is
Set . In weak field, the item , and , thus
Because the Lagrangian with coordinate time is
It could be transformed to be
or
or
To be derivated to be
Considering , it could be solved as
One will obtain that
One can verify the peak point on the case of , and , and then will gain
It is obvious that this solution of cannot keep the conservation of angular momentum. The main reason is that the angular velocity defined in the angular momentum is not the direct component of light speed in Eq. (427). As a comparison, that in Eq. (395) is. Naturally, the solution in Eq. (434) is a wrong answer for light ray propagations after a wrong setting.
8.6. Trajectories of Massive Matters
8.6.1. Discussions on Lagrangian
It is believed in classical theory that Lagrangian for massive matters have a special form [3,10] that others to that of light rays that
As has discussed that for the first item in Eq. (435) , it will naturally lead to
So that
It is totally unacceptable that the covariant velocity results in absolute zero. But we know that the two settings of Eq. (353) and Eq. (354) seem to have been employed to solved the problem. Consequently, the Eq. (435) will be then reformed with them that
It is the traditional form of dynamic equation for massive matters. Of course, it is of fantastic expressions of no sense.
On another side, even the original Lagrangian cannot work for massive matters
in that for massive matters we know that the last two items are definitely unequal to in most cases.
In fact, you know there is no more appropriate dynamic equation for massive matters better than that
where, is modulus of space velocity of massive matters.
The Eq. (440) really performs velocity composition rather than the Eq. (438) and Eq. (439). The covariant velocity composition could be shown as
But it is difficult to be employed for dynamic equations, in that the velocity is not conservative quantity so that it cannot be employed in expressions of kinetic energy.
As has discussed above, it is easily to carried out the momentum equation for massive matters that
and the angular momentum equations for massive matters that
where, at the peak point.
8.6.2. Classical Methodology for Planet Orbits
As the two settings of Eq. (353) and Eq. (354) adopt for the Lagrangian Eq. (435), there will be
One could find that the main item of might sounds literally unreasonable, although the problem will not bring about great obstacles in process of calculation, because constant items in Eq. (444) will be eliminated by a further derivation. Never mind, we will promptly pick up the problem in the issues of time delay in next section.
Set and with and it could be reformed as
To make further derivation, there is
For a planet orbit, the so-called angular momentum , so that in right side of the equation the item is a very small quantity than that of , where, in traditional settings. Zero order approximation of the equation is
It is the famous Binet equation. That has a solution
where, and is orbit eccentricity.
The item could be replaced by the solution approximately that
Then, the Eq. (446) becomes
Considering the conditions of very small eccentricity, in right side, the last item as a variable in absolute value is far less than the third item, as well as the second item as constant is far less than the first item. There will be an approximate form of the equation
We could try to solve the split equations of Eq. (451) of small eccentricity that
with
and the other equation
with
There is the general solution
where as absolute value is far less than . By Taylor equation or sine equation of two angles, we have
So that
This equation presents the perihelion precession that
Thus, the precession in a revolution
as shown in Figure 23
It should be noted, that there will be more conditions in which the Eq. (451) might be invalid in that the orbits may have greater eccentricities, such as some of asteroids and comets in solar system would be. In the case of greater eccentricities, one must entirely solve the Eq. (450) to gain more precise solutions. In fact, for the orbit of Mercury, it has an eccentricity of about 0.206 which implies a considerable deviation from the Eq. (451).
Neglecting the very small constant item in Eq. (450), it could be rewritten as
We could try to solve the split equations of Eq. (461) that the first one
with a solution
and the second one
with
and the third one
As the same form of the Eq. (403) with the solution Eq. (404), a special solution of Eq. (466) could be drawn as
Thus, we could give the general solution of Eq. (461) as
Because the last three items in right hand side are all small items than the first, neglecting the small constant item of third one, it is easy to gain an approximate solution as
This equation presents the orbit precession that
We have gained more precise solution with an additional orbit precession, which could be called in-revolution-vibrating precession.
The orbit precession could be rewritten as
in which the main precession is
and the in-revolution-vibrating precession is
Thus, the orbit precessions in a number revolution at specific coordinate could be calculated as
We have seen that the in-revolution-vibrating precessions are fixed on specific directions, so that the maximum precession may not happen at perihelion or aphelion. As aphelion of revolutions go from to , their aphelion in-revolution-vibrating precessions increase from zero to maximum, as shown in Figure 24.
Surely, in-revolution-vibrating precessions are very small for planet orbits in solar system. However, they could be more obvious for motions in strong fields.
The most interesting is that the solution of in-revolution-vibrating precessions may have caused symmetry breaking. We can figure out the giant circulation as aphelion advances up to an entire circle, shown as Figure 25. One can find out that the aphelion of revolutions goes densified at positions near to and , and goes loosened at positions near to and . It is a breaking of geometrical symmetry, because physical realities of one source field do not provide inhomogeneous conditions. Maybe the geometrical symmetry breaking caused by classical methodology is a self-falsification. If the methodology is reliable and its solution is correct, one can observe in-revolution-vibrating precessions in observations on strong field motions.
8.6.3. Traditional Treatment for Close-to-Light-Speed Particles
Studies on the motion of close-to-light-speed particles in gravitational fields rarely have been seen in any publications probably due to sophisticated situations. I decide to study the issue firstly on traditional methodology is because that more faults would be found out in the process that may forcefully support the conclusions in section 7.
It is believed in traditional methodologies that the Lagrangian Eq. (435) also could be applied in the dynamics of the motion of close-to-light-speed particles that
So as well, the differential equation will be gained as same as Eq. (446) that
But it should be highlighted that the Eq. (479) will be far different from Eq. (446) in that the angular momentum in Eq. (479) is which is far greater than that in Eq. (446). Thus, one will see that the two items in Eq. (479) is in same order of magnitudes while the first item in Eq. (446) is a very small quantity with respect to the latter item.
Using light speed to perform close-to-light-speed is an approximate treatment in numerical analysis.
We know that the trajectory is very close to the horizontal line at positions that is not very farther than . Otherwise at positions that is very farther than , the item will go to zero. Thus, the equation could be reformed to be
The reform will not greatly influence the result of the original equation in that in very farther area together with both are very small with respect to .
There is the solution
And then the deflection angle
Case , there is
Because it becomes
or
The asymptotic line will be
To verify the issue of momentum conservativeness that
At a position
The deflection angle seems something strange. The peak difference shows un-conservative of angular momentum. This result is not far beyond expectation in that this traditional solution involves with errors. We will see more detailed problems on the trajectory in the study of corresponding time spending in next sub-sections.
8.6.4. Renovated Equations for Close-to-Light-Speed Massive Particles
We have got the conclusion that massive particles will not run with general covariance. They run with Newtonian laws. The velocity composition for close-to-light-speed massive particles really is
The conservativeness of angular momentum is as discussed previous
One will find that the momentum defined is rare different from that of light rays. The constant is not the speed of light while it really is the approximate speed of massive matter. So that the in Eq. (489) is just a velocity composition of close-to-light-speed motion. The Eq. (489) and Eq. (490) perform the differences of conservations between light fly and the motion of massive matter. We will see these differences in the equations of low velocity motions of massive matters in next sub-sections.
The angular velocity
Set and in weak field, the item , and . Thus,
Together with , the Eq. (489) turns to be
or
With , and , there is
To take further derivation on, it turns to
Considering , it could be solved as
Obviously, there is
It is easy to calculate in Eq. (497) that at the peak point, , and , so that
Or with angular momentum conservation there is
Again, we obtain
The asymptotic line
It is said that the trajectories of light rays and close-to-light-speed particles present different but they present the same peak difference . The same peak difference is because of the result of momentum conservation.
In fact, these studies have help to create the dynamics of close-to-light-speed particles in gravitational field. By the way, one can compare the solution Eq. (497) with the Eq. (481) in section 8.5.3 that they have given far different result of and different value of , that indicates errors involved in the Eq. (479).
8.6.5. Renovated Equations for Un-Close-to-Light-Speed Massive Matters
Let us investigate a motion of a massive matter from any specific position to another position in one source fields. A matter moving in a gravitational field will be simplified to be a mass point. Considering a variable dynamic mass , the gravity
Dynamic energy converted from gravitational potential by a free motion from to is
and the total energy
where, dynamic mass and correspond to possible velocities.
The function of total energy could be written as
Setting energy at position as a known quantity, this equation could be derivated to be
It could be integrated to be
Then we gain the expression of variable mass that
where, and are dynamic mass corresponding to specific velocities, and is defined as an imaginary concept corresponding to a reduction mass at a farthest position. This equation is general expression of mass variation with respect to the simplified expression in Eq. (379). Particularly for massive matters in some cases the mass could have imaginary velocity. This equation could be called general mass equation in gravitational fields.
And we would like to carry out the expanded expression of gravity equation that
One could find that the relativistic mass may not keep mass conservation any more that may surprise us, but it really has been revealed in realities. This is another kind of comprehensive physics which I will not make further discussions in this section. Mass of matter does matter [24]. The truths stay in realities.
Dynamic energy will be converted during a moving of a matter that
It should be highlighted that the expression of exponential function of mass variation of course could be used for light ray propagations and close-to-light-speed massive particles for higher accuracy analysis case in strong fields.
For massive matters, with special relativity, the equation of dynamic energy at a position is
where, , see Eq. (322).
In gravitational field the dynamic energy varies with positions that
Conversion energy could be positive case potential release or negative case potential withdrawn. However, dynamic energy will be always greater than zero, so that the variable will be limited in some specific cases that depends on initial conditions.
NB, for the convenience of expressions, the tensors of velocities, frequencies or the components maybe not written in tensor format anymore case they may not bring about confusions for understandings, for examples, and refer to the velocity at position and .
It should be further discussed here that we have seen dynamic mass energy may come from the release of gravitational potential. That will then perform as inertial mass and gravitational mass. If in two source system, they move closer or farther will cause mass increase or lose in that we incline to realize that potential does not act as mass. We are not sure that in this condition mass conservativeness is available or not. I am inclining to say no. Maybe this discussion involves with new physics. In this section, this controversy does not really matter. This discussion just presents the issue for more concerns.
With Eq. (509) and Eq. (513), velocity square is obtained that
Case the velocity in a section of the trajectory is close to light speed so that , there will be
where, is a known position in the section. That will lead to the dynamics of close-to-light-speed particles in section 8.6.4.
Now we will be focusing on the motions more generalized than that of close-to-light-speed, the motions including them of un-close-to-light-speed.
The velocity composition for them could be expressed as
With angular momentum conservativeness, there is
where, is radius of the perihelion and is the corresponding velocity and that is vertical to the radius.
Of course, the angular momentum conservation for lower velocity motion will be the same as that of close-to-light-speed massive matters. But they are really different from that of light rays.
So that
Together with the Eq. (514) and , the Eq. (516) becomes
or
Setting , it is
To derivate this equation once more, there will be
This is a general equation for the dynamics of massive matters moving in gravitational fields, no matter the velocity is close-to-light-speed or un-close-to-light-speed. One can solve the equation by numerical method or linearize the exponent items with nonlinear coefficients and solve it by segments, for example, the methodology of Newtonian tangent lines.
We can yet simplify the equations in some special conditions.
Case in the conditions that and , in which we know that and are both close to zero, the Eq. (522) could be rewritten in an approximate form that
or
Neglecting small items, it becomes
With this solution being substituted back into Eq. (525), it is obtained that
For periodic motions, one-order approximation of Eq. (521) in the condition of and could be presented as
Neglecting very small items, it is
With Eq. (527), it becomes
where, is orbit eccentricity.
Case there is
where, is orbit eccentricity.
This equation is the velocity composition equation at the position of . The first three items correspond to the component of minus total systematic dynamic energy, in which, the previous one is of the initial condition and the other two comes from potential conversion. The last item is of the component from angular dynamic energy. The fourth item is of the component from radial dynamic energy.
So that the eccentricity could be written as
It should be highlighted that, in the motion with , one cannot apply one solution of the Eq. (527) into the entire trajectory because may vary in a long run. A solution could only be presented for a limited segment of the trajectory.
In conditions that the variation from to is considerable not very big, we will see that . The Eq. (524) turns to be
With small items trimmed, there is
Setting
Case is very close to 1.0, there is an approximation that
The equation would have a solution
where, is orbit eccentricity.
With this solution being substituted back into Eq. (535), it is obtained that
The eccentricity becomes
Sometimes, we prefer to pay more attentions on the performances on irrelativistic velocity motions in which is far less than and at the same time , as that of the motions of planets in solar system. The dynamic equation Eq. (535) becomes
and
For planets in solar system, is close to , so that
The solution for the Eq. (541) as
where, is orbit eccentricity.
It could be calculated that
One will see that in this equation is a little greater than that in Eq. (458).
The eccentricity is as same as Eq. (540)
Some publications have given the following expression for eccentricity
where, has been set the angular momentum, is the long semi-major axis, is gravitational constant and is the mass of central source. But this is not a real solution for eccentricity, because that the solved in Eq. (544) is which is a reformation of Eq. (547). The eccentricity cannot be solved with by the Eq. (547).
The perihelion precession of solar planets could be presented as
or the precession per revolution as
That could be shown as in Figure 26.
The most surprising is that this solution of perihelion precession is non-general-relativistic. It is a half of the value of the classical solution. Obviously, the classical solution is involved with errors in that once the relativistic mass being considered will absolutely lead to another result. It is practicable to carry out more experiments of motions closely around the Sun to verified the conclusions of Eq. (548).
One can focus on more sophisticated conditions for massive matters traveling in gravitational fields, especially for those motions in strong fields and with relativistic velocities.
Perhaps this result is the only one in which we have focused on that is in contradictions with the observations that have declared perihelion precessions of planets in solar system [17]. Some observations on PSR J0737-3039A/B [26,27] have shown quite big deviations from classical predictions, which had been expected to have perihelion precession together with geodetic precession. Nevertheless, the experiment of Gravity Probe B [28] shows that geodetic item has got accurate results while frame-dragging item has not, in which it could be recognized that the geodetic item is really the effect of special relativity. Observations on PSR 1913+16 [29] have provided more evidences on energy conversions rather than perihelion precessions. The observations have not been well done for the verifications of perihelion precessions of S2 and S62 [30,31] in our galaxy. It could be expected that more observations on them and so on would be sponsored to furtherly verify the results of perihelion precessions.
8.6.6. Dynamics within the Event Horizons
We know that we know less about the physics with in the event horizons. But it is interesting to imagine the possibilities that might happen. It could be predicted that a massive matter with initial velocity high enough will have opportunities to escape from a black hole.
The massive matters would have velocity limit of light speed. That indicates a minimum radius for circular motions in one source fields. It has been discussed in previous that vertical component of gravity would lead to Newtonian geometrical acceleration at that direction. This will then support the equation of centrifugal motion case the matter catches up to the velocity close to light speed. The equilibrium equation could be written as
The minimum radius
It indicates that there will be three conditions for the close-to-light-speed motion on close to circle. Condition 1 is that matters move along a circle orbit under which the matter keep circular motion. Condition 2 is that matters move at inner inclined direction at a start time so that they cannot keep periodic motion and will fall to source center finally. Condition 3 is that at the initial state, the motion direction is outer inclined, which could lead to complex results dependently.
It could be imagined that the dynamics in all the regions within event horizon and close outer space will be greatly sophisticated. I would like to make more discussions on radial escape. With the Eq. (528), the total mass for a matter escape to event horizon from inner area is
and the mass to escape to free is
where, is defined due to velocity after escape that has been set zero.
One can calculate the minimum escape energy for matters at different positions. A brief calculation is shown in Table 4.
8.7. Time Spending Problems
For a light ray passing by the Sun, the apparent light speed varies with the positions and directions on the trajectory. There should be a difference between the real time spending and that time spending calculated based imaginary light speed instead of apparent light speed so that to seem like a time delay for a light ray arrival. Shapiro proposed the tests of time delay of radar signals which transmitted from the Earth to pass by the edge of the Sun to another planet or satellite and then they would be reflected back to the Earth [32,33]. The observations on time delay of radar echoes would forcefully support the theory of general relativity as well as that of light ray deflect.
However, the solutions of time delay must have involved in the problems with light trajectory, that the solution process has inherited the errors in classical equations of light trajectory, so that it is necessary to make a detailed discussion to investigate.
8.7.1. Classical Solution for Radar Echoes
In classical procedure, with the assumptions of and , the Lagrangian could be transformed to be
as that in Eq. (355).
And again with , the could be deformed to be
Of course, this treatment is unreasonable as well as that acted on in Eq. (554). Obviously, this will bring about additional influences than that in light deflect problem. Now, we are just reviewing the classical methodology for further investigations.
Thus, the Lagrangian becomes
At the peak point, so that there is
Where, is the coordinate of the peak point.
Taking it back into the Eq. (556), there is
or
Then, the time spending from coordinate to coordinate could be integrated as
Because and are very small, it could be written as
It has an approximate solution [4] as
8.7.2. Errors in Classical Methodology
We have known that the assumption in classical equations is incorrect. In fact, the equation could be solved without the assumption. Such as the Lagrangian
With it is
And we know that
so that
In this equation the postulation Eq. (354) has been given up. That will cause a natural solution after the setting momentum conservation, Eq. (353).
The differential relationship could be integrated that
Approximate solution is
One can find that this treatment has just brought about a little deviation from the previous. That is because the trajectory is only a little different from that one at deflect angle. This investigation has revealed the different treatments on conservativeness between Eq. (554) and Eq. (564). We will present the result under correct expressions of light momentum conservation and mass conservation in next subsections.
8.7.3. Renovated Equations for Radar Echoes
The revisit equation of trajectory may help to get new performances of the issue.
For the Lagrangian
In previous section, we have got the angular velocity expression based on energy momentum conservativeness as discussed in previous sections that , so that
Setting and in weak field the item , there is
Then the Lagrangian becomes
With , it could be rewritten as
With it becomes
so that there is
or
or
The time spending from coordinate to coordinate could be written as an integration as
or
For a function
where, , the derivative
Considering is very small, the rear part in the integral Eq. (579) could be simplified as
Then the time integration will be reformed as
where in the last item, a multiplier has been simplified to be 1.
The first part of the integration could be calculated to be
and the last part is done as
so that the total integration is
8.7.4. Falsification of Traditional Methodology on Time Spending of Close-to-Light-Speed Particles
Time delay of close-to-light-speed particles is the same issue as the trajectory. Nevertheless, we could see more problems revealed in this issue.
As Lagrangian is employed in traditional methodologies as Eq. (438) with the two settings as
it could be rewritten as
And with the setting in traditional method as that has been applied in the Eq. (555) for issue of radar echoes
it is
At the peak point, , and so that there is
where, is the coordinate of the peak point.
It could be imagined that in the traditional solution of light ray, constant could be calculate to be an approximate of as that in Eq. (557), but in this condition it should go to about .
Therefore, the equation is
It could be reformed as
The time spending could be drawn from the integration
Some small items could be neglected that
or
or
It is a good idea to reform the items in root function above that for the function
where, which could present main quantity of the function with respect to the rear part which just performs a higher order small item. The derivative
Considering and are very small, the rear part in the integral Eq. (597) could be simplified as
Then the integration could be gain as
where in the last item, a multiplier has been simplified to be 1.
The first part of the integration could be calculated to be
while the third part is
Then, the second part is
It is better to be split to two parts for integrations
The last item would be involved with an infinite problem at lower bound, but it could be solved by an offset with another infinite problem in next equation.
The final solution could be drawn as
It is an unacceptable solution with coefficient in those items, especially in the first item the approximate will cause a giant time delay with respect to the expected time interval . That is because of the treatment in Eq. (589) that the left item has got a double value by mistake. This result has revealed a very strong clue that the settings treatment of Eq. (589) so as well the setting in Eq. (354) involves with errors certainly.
If the Eq. (354) will not be persisted in we will see that by definition rather than by Eq. (591). Thus, we can repeat the calculation for the Eq. (588) that
Case , we get the same
It could be reformed as
Time spending could be solved by integration
It could be reformed as
Because
The time integration could be rewritten as
in which,
To split part 2 to two parts
and
The final solution could be drawn as
This solution sounds more acceptable than the previous but it is still involved with errors.
8.7.5. Renovated Solution for Close-to-Light-Speed Particles
Now, let us discuss another kind of no-delay time spending, the time spending of close-to-light-speed particles. The velocity composition of close-to-light-speed particles could be expressed as
With angular momentum conservativeness as that in Eq. (425), there is
or
so that the time spending integration could be built as
8.7.6. Equations of Time Delay
We have found that the revisit solution of time spending of radar echoes is the same with classical. The reality is that the classical treatment has got the same trajectory by additional settings, so that it is undoubtful to gain a same time spend with. In fact, the problem of time delay of radar echoes is just a kind of performance of light deflection. The results in these discussions are also just extensions of that in the problem of light deflection. The classical equation for time delay of radar echoes is to defined the difference between time interval of light rays and that of an imaginary motion of absolute light speed, and the half length of the trajectory has been coarsely set to be
So that the classical equation of half branch time delay could be calculated with Eq. (586) as
But the half branch time delay of light rays, with respect to the time spending of close-to-light-speed particles Eq. (622), will be a little different that
One may argue that the trajectory of close-to-light-speed particles will be different to light rays. In fact, the real length of the light trajectory also does not equal to . One can easily take measures to work out the real length of that trajectory. I prefer to give a more accurate value than Eq. (623) that could be estimated by geometrical relationship as shown in Figure 22 while that
where, is deflect angle of light ray.
So that a real half branch time delay of light rays with respect to an absolute motion on the very trajectory is
We know that the time delay has been verified to be very high accurate value with respect to the classical equation, that is because the trajectory length has always been set to be , which is indeed not accurate length of trajectory line.
If consider the close-to-light-speed particles, the real length of its trajectory line could be estimated to be
where, is deflect angle of particles.
With Eq. (622), the half branch time delay of close-to-light-speed particles is
The zero time delay is because the particles keep approximate velocity during flying on the trajectory. This result is a certainty of velocity conservation for massive particles.
Something different from trajectory investigation, the test of time delay of light and close-to-light-speed particle propagation might allow a quite big separation to the Sun edge thereby to provide not bad accuracy. Furthermore, it could be expected to sponsor experiments to emit light rays and massive particles on a straight line from a point not very close to the Sun at the same time for time delay verification.
8.8. Comparative Research between Numerical Solutions and Algebraic Solutions
8.8.1. The Invalidity of Newtonian Second Law in Light Propagation
It is interesting that perhaps there is the probability to carry out a new numerical method to calculate the light trajectories or close-to-light-speed motions in gravitational fields, which could be called ballistic trajectory method. Considering that the gravity component parallel to the motion trajectory will not bring about any changes for close-to-light-speed motions, we could only consider the calculation on motion variation due to the vertical component of gravity so that to determine a differential coordinate on the trajectory. Thus, in the way incremental, the trajectory could be solved at last.
Firstly, it is proficient to take a motion of close-to-light-speed massive particle in one source field into discussion, as shown in Figure 27.
It is believed that for a massive particle in weak field, the vertical deviation could be solved by Newtonian second law
where, is the component of gravity vertical to the velocity of the particle.
The coordinates at position are known to be or . As well, the trajectory will have a direction with angle at that position. Then, the distance in a time interval the particle travelling is
The deviation angle of to is
and
Thus, the coordinates at position could be calculated as
or
It should be highlighted that the angle is not the direction angle . The could be calculated by angular momentum conservation that
where, .
Now back to the fly of light ray from position A to position B. It might be imagined to calculate the deviation also by Newtonian second law. That sounds naturally to see the photons as light speed particles with dynamic mass so that to deviate in the same way as massive particles do. Unfortunately, it is impossible in that that kind of calculation will lead to the result very close to that of massive particles. It seems like that the Newtonian second law sounds invalid in light propagation even at the vertical direction. Perhaps one can propose a double gravity for a simulation on light propagation with respect to that of massive particles and it could be imagined that the results would be of not bad precisions. But the truth is that they are really not of a same issue in that they would have different asymptotic distance . An interesting clue is that light rays are un-accelerable even at the direction vertical to the motion. Maybe that could be employed to interpret the invalidity of Newtonian second law.
Anyway, there is still an opportunity to explore the ballistic trajectory method for them. That is to perform by trial methodologies. We can imagine that after point A there will be a wave front after Huygens’ postulation, then, some points on it may be selected for further considerations. With angular momentum conservativeness and Lagrangian, one can calculate the velocity and angle , as well as coordinates as shown in Figure 28. Thus, the deviations of the points could be estimated to help for further trials. I have made more efforts to try but that have not been done, although I still believe the probabilities.
8.8.2. Comparisons of Numerical Solutions and Algebraic Solutions
To make comparisons with numerical and algebraic solutions is not only a kind of further verification but also a further support to the conclusion of energy moment conservativeness, and at last, a surprise of light propagation. As has discussed previous, ballistic trajectory method could be developed to calculate the trajectories of close-to-light massive particles. It could be applied by dividing trajectory to finite segments and calculating coordinates with Eq. (630) to Eq. (638) step by step. The invalidity of Newtonian second law for light propagation is actually another kind of support to the inferences of kinematics.
Notwithstanding, difference method for all differential equations could also be employed for more comparisons. Difference method has shown great advantages in scientific calculations and many excellent schemes have been developed to serve for more complex requirements.
For the equation of light ray propagation
The simple central difference scheme could be suggested that
Thus, the difference equation could be built as
Pre-exercises show that if step intervals defined by , the calculations would get quite good accuracy.
As for the dynamic equation of close-to-light massive particles
could also be built simply as
Thus, we would sponsor a comparison with the analytical solutions, difference method solutions and the ballistic trajectory method solutions mentioned previously, together with the asymptotic lines and horizontal line for references.
Numerical methods of difference and ballistic were carried in office computer and others were completed by the calculator of my mobile phone, in that the phone calculator could provide 8 floating point precisions more than that of the Fortran software in the computer.
It is shown in Table 5 that difference method and ballistic method still perform not bad precisions in the results of upper parts of the trajectories. Of course, both of the two methods are of step by step arithmetic so as to accumulate quite amount of deviations at the rear parts of the trajectories. Anyway, the two numerical methods are reliable, that greatly supports the inferences of kinematics.
It is easy to develop more optimal schemes for difference method and the way of optimal secant seeking instead of the tangent seeking for ballistic method or any other effective technologies to improve the precisions of numerical analyses. That will confirm the conclusions and inferences that have been drawn previous.
8.9. Additional Discussions
8.9.1. On Geodesic Line, Inertial Motion, and General Covariance
We have discussed those derivatives theoretically in section 4, section 5 and section6 that in covariant space the acceleration of a massive matter could not be really calculate to be zero and even revisit light frequency shift will perform double of that of contra variant space. There is only the light speed that always serve the general covariance as the result the acceleration of a light ray may perform nonvanishing in covariant space in any conditions. These conclusions would have then challenged the theory of geodesic lines, because geodesic lines ask for thoroughly nonvanishing solutions for covariant derivatives. We also have proved that geodesic equation cannot be really employed for the solutions of massive matter’s motions as well as the motions of light rays in section 8.
Now it is the time to make additional discussions on the tips between matter’s trajectories, inertial motions, and geodesic lines.
General covariance asks for matters in covariant space to perform inertial motions just as they perform in no gravity fields. That requires trajectories of matters stay on the lines of geodesic lines in gravitational fields.
Geodesic lines are of the so-called straight lines of a covariant space that present the geometrical properties of the space. But inertial motions must ask for more. For example, an inertial trajectory must serve for any matters to run on, either the massive matters or light rays. The more important is that inertial trajectory must be run on by any matters with any velocities with same direction. It could be said that inertial motions share trajectories.
Back to the massive matter’s trajectories, it is no doubt that any two matters with different velocities in gravitational field with same initial positions and directions, will fly apart, so that to fly on two trajectories, just as matter’s motions in solar system. These trajectories of course correspond to two lines in covariant space. It is said that the matters with different velocities may not share trajectory in covariant space so that the motions are not inertial motions in covariant space and the trajectories are not geodesic lines.
As for light rays, due to the consequence of invariant light speed, they will come up to zero accelerations in covariant space and we might have seen that light rays could share trajectories in different frequencies, that really performs general covariance. But the trajectories of light rays are not that of real inertial motions or geodesic lines yet, in that light rays do not share trajectories with massive matters.
The motions of close-to-light-speed particles are something special, in that they would have zero acceleration approximately just as light rays, but they do not share trajectories with light rays and un-close-to-light-speed particles as have discussed.
8.9.2. On 4-dimensional and 3-dimensional Velocities
We all know that vector composition could be expressed in vector summation as well as in way of component square, by the Pythagorean theorem.
For example 4-dimensional velocity in contra variant space as
could have a composition of
where is defined the component vector at the direction which has a value .
or the form of
where , and is module of . Only in the condition that matter’s velocity catches up close to light speed , the modules may be close to zero.
As in covariant space, there is
That would have a composition of
or the form of
where , and could have a value uncertain to compare with so that the setting of is really a fault treatment.
For light rays, the contra variant velocity will be composed to be nonvanishing
or
where .
But their velocity composition in covariant space there is
or
where , and because the summation of the last 3 items is we will then gain zero value of just as the Lagrangian has been defined.
We have seen that 4-dimensional velocity does not always make sense. It is not a bad idea to return to the expressions of 3-dimensional velocity in some conditions that we call them true velocities.
where, is total quantity of the true velocity.
or the form of
In some cases could be greater than .
As in covariant space, there is
or
where, could have a value less than or equal to or great than .
For light rays, the contra variant velocity will be composed to be
or
And in covariant space there is
or
It could be found that in some cases, matter’s velocity may be greater than light velocity that
or
8.9.3. On Light Momentum and Massive Matter’s Momentum
As have discussed, momentum and energy refer to that issues which will keep conservation during whole movement, so much as we cannot confirm that they are only valid in contra variant space. We have seen that for light rays, frequencies could be employed to perform momentum and energy, but for massive matters, there will be something different. It is based on physical realities that the conservative quantities be defined. Therefore, I will not discuss any transformed forms of momentum and energy, so far as to deal them as tensors. Owing to mass energy equation, matter’s total mass could be seen to be equivalent to total energy. These treatments will not do any harms to our understandings on realities. One of the reasons is that conservative quantities are of something invariant. For example, as light speed is used as invariant value in some cases, it could be treated as a scalar. Momentum and energy keep conservation except inputs or outputs.
As we talk about light momentum of square forms, the modulus of 4-dimensional velocities in Eq. (651) and in Eq. (653) cannot be selected for momentum equation, in that is zero and is close to zero in weak fields. As for the modulus of 3-dimensional velocities in Eq. (659), it varies in gravitational fields. So that in Eq. (661) is the only choice.
For square momentum of massive matters, the modulus of 4-dimensional velocities in Eq. (646) and in Eq. (649) also cannot be employed because of similar reasons. The in Eq. (657) is not a conservative quantity, as has been proved previous, while in Eq. (655) is so that the latter could be employed for momentum expression.
As has mentioned light momentum will be performed in special forms that
or
The most surprising is that the vector of momentum would have direction others to the tangent line of trajectory. For a light ray propagating in one source fields, the momentum direction will coincide with trajectory at peak point or be asymptotically close to the trajectory in very fast area as shown in Figure 29.
The surprising forms of light momentum encourages me to make an assumption that a light ray refracted from a media to another would have equivalent light momentums.
Momentum of massive matters could be expressed as
or
The vector of momentum of massive matters will always coincide with trajectory in gravitational fields.
9. Relativistic Release and Relativistic Frequency Shift
It is predicted that in one source field, the inflow of matters may cause relativistic release. Sole matters moving into the source center for a separation is of course exactly a kind of inflow. But I want to point out that the inflows of accretions of quasars and active galactic nuclei are of normal performances in celestial evolutions. As the matter of facts, they have not been well investigated, so that it is necessary to cast a few concentrations on.
9.1. Dynamics of Accretions of Quasars and Active Galactic Nuclei
9.1.1. Galactic Accretions and Planet Rings
The discovery of quasars and active galactic nuclei is of the greatest advancing of the astronomy in the 1960s [34,35]. Quasars and active galactic nuclei are of the most spectacular extragalactic objects not only because of their extraordinary giant radiations [36] but also due to the complicated spectra and very high redshifts. The emission spectra of quasars and active galactic nuclei are really non-thermal continuum [37]. Those issued models for quasars and active galactic nuclei in the past decades, such as the so-called standard model [38] or unified model [39], have not really interpreted the mechanism of accretion inflow and energy release. This is the reason that I want to sponsor a brief discussion on the dynamics of accretions of quasars and active galactic nuclei.
Galactic accretion disks exactly experience resemblant kinematics with planet ring systems in that both of them are of surrounding dusts revolving the center source, loosely inside the Roche limit [40]. I am going to sponsor a study firstly with respect to the planet ring systems so that to renovate those recognitions upon the evolution and fueling mechanism of galactic accretions.
Planet rings are not static structures [41,42]. Their evolutions involve with numerous internal and external processes in which Keplerian shear acts the key role. It causes rings to spread [43] in all process. As we have seen, Saturn rings usually have that striking refined structures.
In the condition that ring particles are small enough, the electromagnet interactions will then overcome the inertial forces so that to control the motion within the rings. Such particles or together with gases getting to form colloid, will be as a whole to perform fluid behaviors so as to bear pressure. Under the driving effects from outer boundaries, a fluid ring may go bolder cubically because pressure increasing helps particles to move deviate vertically to the ring plane, such as the Halo ring of Jupiter [44]. Spectrum observations predict that the particles in Halo ring are less than submicron. Optical observations also show that Halo ring seems blue and gray with respect to that the main rings show red color [44]. It is because that the fine particles scatter more blue rays, just like our sky does, while coarse particles scatter more red.
Firstly, I want to make a discussion based on a fluid ring in the condition that the center velocity equals to Keplerian velocity.
9.1.2. The Dynamic Models of Fluid Rings
For Keplerian motions of matters around center object, there is
where, is mass of a particle, is gravitational constant, is the mass of center source, is distance to the center and is angular velocity while is tangent velocity.
The tangent velocity and angular velocity will increase as radius getting smaller that
Keplerian kinetic energy could be expressed as
Keplerian motion determines constant angular momentum for a particle at specific position.
Namely, there is Keplerian shear at the specific position, and the shearing rate can be derived to be
I do not think that the dynamics of planet rings is very easy to be built in that the evolutions of the rings must be rarely sophisticated. I prefer to suggest three simplified models that may reveal a little bit of probabilities.
- Model 1: Central Keplerian motion with driving front and resistant front
It is imagined that a ring keeps Keplerian velocity at its center position while outer part has velocity lower than Keplerian velocity so that to form driving force, and inner part has velocity higher than Keplerian velocity so that to form resistant force. In this way, the driving force and resistant force could help to form fluid pressure to bolder the ring at vertical dimension as shown in Figure 30. That really others to the flat rings as that of Saturn.
For example, in the outer part of a fluid ring, if the velocity is lower to form driving force, the pressure could be calculated as
where, is density of fluid, is radius from source center to the outer edge of fluid ring, and the angular velocity is less than Keplerian angular velocity of the very point so that to give driving force. If a linear function is assumed for an element of outer part
where, refers to radius of pressure center and represents the angular velocity square difference with respect to , which is the Keplerian angular velocity square at the very position .
This equation presents an active falling of the outer part particles because of losing of energy and velocity.
Concern that at every position there is the relationship
The Eq. (673) becomes
Giving the pressure of inner edge and outer edge equal to zero, and constant density, and , there will be an approximate solution of center pressure
where, represents the outer radius of the fluid ring.
On another side, the resistant force determined by the higher velocity of inner parts, with velocity as
In which is greater than so that to form a passive resistant force.
There will be the center pressure
where, represents inner radius of fluid ring.
On the direction vertical to the plane, it is easily to calculate [36] that
where, represents vertical height from top or the bottom to the center of the ring, is the distance to pressure center and is Keplerian angular velocity at pressure center.
Thus, the relationships between semi axes are
The outer edge of the ring may be called driving front, depending on a random falling of outer particles, that forms an ambiguous boundary. The inner edge of the ring comes from passive driving, may be called driven front, so that to form a sharp edge as seen in Halo ring [44], just like curved water surface in an accelerated container. Of course, fluid rings also can be flattened and split to be refined structures so that to perform more complicated than Halo ring.
- Model 2: Driving condition with no shear motion in inner part
It is assumed that the driving force will form a pressure gradient in inner part that just fit the gravity difference coming from Keplerian velocity difference so that to form no shear motion as shown in Figure 31.
There will be
It is said that any differential slice in the inner part may be accelerated by outer squeezing to catch up the velocity .
That indicates an increase of the angular velocity square to meet the force equilibrium
Thus the ring pressure could be written as
Assume a constant density, the central pressure is about
That will lead to a special state that inner part of the ring has no Keplerian shear. But this state may need strict conditions and may be destroyed by further evolution in a long term.
- Model 3: Momentum conversion and ring split
After then, I want to discuss the split of a ring under the condition of developed Keplerian shear. If a fluid ring is well Keplerian sheared, it could be predicted that the ring will go thinner. We know that there may be Keplerian shear at any position in the ring. But we can make an analysis on the angular momentum conversion in the middle point which could then at last split the ring to two parts. For convenience, it could be defined as two rings originally, the ring and the ring as shown in Figure 32. They will have their own Keplerian velocity points at and . In a time interval, the two rings will complete quite amount of angular momentum conversion because of the Keplerian shear, which is just like viscous friction acts in the interface that makes the conversion.
Setting the mass of rings , the relative angular momentum difference between two neighboring rings could be estimated as
where and
The exchange of angular momentum may be expressed as
where, momentum exchange ratio .
It is said that after a Keplerian shear, the outer one should get increase of angular momentum and the inner one should get that decline. For the reasons of kinetic mechanism, both the inner ring and outer ring will be driven apart from original position. If inner ring goes a difference , the difference of Keplerian angular momentum could be calculated as
Let equals to , it is obtained that
For the inner ring, it goes to shrink by falling a (minus) separation so that to form a new state. And for the outer ring, it expands by going up to a (positive) separation.
We have seen that this is not a whole dynamic analysis because that the pressure in the ring has also taken the effect of angular momentum conversion directly, but that does no harm for the conclusion that Keplerian shear, i.e., the viscous shear in the ring, leads to angular momentum conversion and rings split. One can make detailed study with Navier Stokes equations or the renovated ones.
A process of ring spreading around a source center is an irreversible process with entropy production.
9.1.3. Shearing Dissipation in Fluid Rings
This issue is carried out to estimate the shearing dissipation so that to discuss the evolution by Keplerian shear. Of course, the evolution would involve together with momentum conversion and ring split. But in the way of theoretical methodology, it is better to be investigated in two steps, the angular momentum conversion by Keplerian shear, and the energy momentum conservation during rings split.
Angular momentum conversion must be done across the interface between the two rings, so that the first step analysis is reasonable. I prefer to focus on the states before and after momentum conversion of two neighboring rings as has been shown in Figure 32. Before conversion, the neighboring rings have been separated by , with velocities
The difference between and could be written after Eq. (672)
where, , is defined as minus quantity while as plus. Namely,
Considering ring mass equals to each other, two conditions would be taken into study.
As angular momentum conversion happens, there are
As has been defined minus, the inner ring is really slowed down and the outer ring is accelerated. Because of , kinetic energy may not keep conservation. With original kinetic energy of
and the kinetic energy after conversion of
Thus, there is the dissipation energy without considering potential variations
Considering the Eq. (693), it turns to be
Then go to the second step that after the first step of angular momentum conversion, the outer part of inner ring loses momentum so that provides driving force to drive the inner ring to inflow and the inner part of outer ring will be accelerated to higher momentum so that to squeeze the outer ring to outflow. This evolution will perform a little sophisticated in that the inflow ring should be accelerated by gravity and the outflow ring should be slow down by gravity. We know that the inflow of a ring will cause half potential release surplus with respect to the Keplerian energy requirement and the outflow will experience potential withdraw. And also, we know that the gravity is perpendicular to statistic velocity of the ring. These issues could be solved in fluid flow anyway, even though that must involve with the evolution of vortexes.
Now we are going to check the energy conservation of final state. After the inner ring inflows a separation and the outer ring outflows a sepration , they come to a new state of Keplerian balance. Taking the inner ring for granted, before Keplerian shear, its total energy involves with Keplerian kinetic energy and potential
After Keplerian shear and inflowing a separation , total energy becomes
and for outer ring, the energy before
The energy of final state
Total energy difference before and after the two steps could be estimated by
The first two items could be transformed as
The middle two items could be transformed as
so that the previous four items are
The last two items are
The energy difference is total energy dissipation
One can calculate the gravitational potential release of a single ring inflowing, although it does not sound reasonable for a comparison with dissipations because there is another ring outflowing. Anyway, that is
Thus, we get the ratio of dissipation and potential release
Or the ratio of dissipation-1 and potential release
where .
Ring evolution dynamics indicates that the inner half of an accretion inclines to inflow and outer half inclines to outflow by and large. Additionally, the process of vortex evolution would dissipate, even though the two dissipations are not independent.
It shows that the dissipation in vortex evolution might be greater than that in momentum exchange between rings.
We know that inter-ring separation would be far less than the radius of relative rings. It is said that in the condition of Keplerian shear, the dissipative energy is a higher rank infinitesimal quantity of that of potential release of inflow, no matter that inner ring potential release will support the outer ring potential withdrawing. Classical quasars could have luminosities of 1045 erg s-1 to 1046 erg s-1 [45]. It is unimaginable that those releases completely come from gravitational potential energy.
9.1.4. On Particle Rings
For solid particle rings, it is difficult to make a simple analysis on angular momentum conversions and on ring’s evolutions. In fact, any head-to-head collisions, and partial collisions of edge-by-edge that might form additional rotations, between two particles, might cause great changes to their trajectories. It could be imagined that for numerous particles in neighboring rings, assuming very small velocity difference between any two Keplerian collision particles, we can predict quasi fluid behavior for Keplerian shear acting on neighboring rings, that in a whole, Keplerian shear help to make angular momentum conversion and ring split. One can also write down those equations of energy momentum just as that of fluid rings. But all in all, particle rings cannot form pressure so that they will only spread as a very thin disk with perfect and refined structures in the equator plane, unlike the fluid rings, which could form a bold 3-dimensional torus structures. I believe that numerical method could be expected for quasi fluid behavior simulation for Keplerian shear of particle rings, as the effects of the rings of Saturn have shown us.
9.2. Relativistic Release
Any efforts to conceiving the mechanism of relativistic release would encounter great difficulties, because of two reasons that relativistic release has not been well recognized and we still know less about the intrinsic structures of fundamental particles that might be revealed relativistic emissions. But on the other hand, tremendous of observations have shown incredible probabilities for intrinsic emissions and correlated pseudo redshifts, as well as intrinsic redshift of absorptions, which are so intensely corresponding to the inference of relativistic release that I cannot help to make a try.
A direct realization on this issue is that the conservation of electromagnetic momentum and invariance of electromagnetic wave speed will lead to the variation of proficiency of light moment transportation, then the interactions or so-called the forces between particles, especially that in intrinsic structures. The most complicated is that these variations would be anisotropic so that the dynamics must be even profound and comprehensive.
Despite the complexities of relativistic release for a massive matter inflow into the center source, I suggest a mathematic analysis based on an assumption of continuum release. It is still not a true expression of realities, but that may help for more understandings on that topic.
The apparent light speed could be employed to describe the concept of equivalent state in gravitational fields. It may be a state after relativistic release, although this state should be not really stable because there should be energy deficiency in the other two dimensions.
One can discuss the momentum exchange efficiency under the conditions of different apparent light speeds so that to talk about the variation of equivalent state. Another important clue that indicates equivalent state is the fine structure constant. We know that fine structure constant determines the dimensions of condensed matters, of course that may determine the dimensions of intrinsic structures. We can imagine that the variation of apparent light speed could bring about the variation of fine structure constant so that to bring about the variation of the energy of equivalent state.
I don’t think all of energy of a matter would take part in the relativistic release, for example, the most fundamental particles may be expected to be made of quasi photons, in common recognitions, they might not be split anymore. Thus, we would rather define the concept of releasable mass . I cannot give an estimation whether the maximum releasable mass should be up to or not, but it could be believed to be quite amount, where is total rest mass of original equivalent state, which corresponding to the state that the matters do not experience relativistic release.
Now for a center source field, equivalent state of matters is proposed to be
Matters located at different positions in the gravitational field perform different equivalent states. As a matter goes a separation along the radial direction, the expression of exceeding energy is
As a matter goes from the farthest point to the position of radius, the relativistic released energy could be integrated to be
Thereafter, we could also define a corresponding concept of the relativistic residual energy that, at a position, matters keep an amount of energy for subsequent releases,
It seems that the residual energy may go zero as matters reaches . It is just a solution of theoretical model. In practice, relativistic release will be intermittent, and matters perhaps to experience flattenizations as they close to so that to bring about instabilities. As results, residual energy may not go zero at the end in practice. This effort is just to manage to perform kind of probabilities of relativistic release.
It can be calculated that most part of energy is kept before
Now it is naturally to define the release rate by derivative of release energy along the radial direction to the center source. Released energy could be the integration of release distribution function from a position farthest to the position or the minus inversely
On the other hand, the residual energy could also be defined as an integration of release distribution from position to position or the minus form
Thus, the release distribution could be derivated to be
It is easy to calculate that the peak value locates at the position
with the maximum release distribution
One can calculate the release intensity of accretion inflow. Setting equivalent mass for every single ring in an accretion, the luminosity could be derived as
where, is matter’s assuming density at the position and is inflow velocity.
Suppose the accretion spreading sufficiently, it can be calculated that the most luminous area is at the position
As well as maximum luminosity
Release distribution and accretion luminosity could be shown in Figure 33.
The Eq. (707) represents intensity of release at a specific position in an accretion disk. It is revealed that the peak luminosity should not happen at the edge of horizon event, but at a little outer position, just as that was shown in the event-horizon-scale images of M87 taken by the Event Horizon Telescope Collaboration with wavelength of 1.3mm [46].
9.3. Relativistic Emission Lines and Relativistic Redshift
Eyeing on the stimulated release of electrons in atoms, we could carry out a concept of exceeding ratio for relativistic release of an energy structure.
where and are energy of excited state and ground state of specific structure. Exceeding ratios for relativistic release may be more different from that of stimulated release of electrons, probably, they might be quite small or big. We know less about that.
In one source field, exceeding ratio would be variable with position as the so-called equivalent state has shown.
Thus, frequencies of specific emission rays could be written as
Case it could be simplified to be
These emissions of course include but not limit to electron transition emissions that we are more familiar to that could be easily certificated comparing to stimulated release on the Earth. This kind of frequency will be quite different with which we have known well in weak field, in that it looks like redshifted after photons reach the Earth. But it is just a pseudo redshift because the emissions have not experienced real redshift at the emission time. The fact is that it is only verified to be redshifted by comparing to the spectrum characteristics of a matter in weak fields. In this case, it is just redshift seemingly. It could be called relativistic redshift.
In practice, emission lines will experience gravitational redshift to arrive a farthest position. The Eq. (509) could also be employed to interpret light mass energy variation in gravitational field, so that the detectable frequency could be expressed as
If a detector is at a position close to the Earth, one should furtherly calculate the gravitational frequency shift in gravitational field of the Earth. That will not be presented here.
Case , the Eq. (731) could be simplified to be
Propose a definition of relativistic frequency shift based on frequency
Case it could be simplified to be
It is an intrinsic frequency shift rather than cosmological redshift. Note that keep invariant during propagation process if neglect the effect of gravitational redshift. is the comparative frequency of equivalent radiation in no gravity condition.
Detectable redshift should be calculated as
Case it could be simplified to be
Relativistic frequency shift and detectable frequency shift could be calculated for comparison in Table 6.
The highest redshift we have observed on quasars is up to 16.4 [47,48]. It could be expected that higher redshift would be seen to be up to more than 20.0 in recent future. Perhaps higher redshifts have already been observed but not certificated.
Perhaps, up to now, we have found the probable way by which the accretions of quasars and active galactic nuclei release energy. It has been pointed out that the giant radiations of quasars and active galactic nuclei are not of thermal continuum. It has ever been believed that the radiations come from the energy of gravitational potential conversion [36], but we know that the energy of gravitational potential conversion must release radiation by the way of thermal black-body radiation. This will then lead to a contradiction. And in previous section, the dissipation of potential conversion of an accretion has been proved to be an infinitesimal of total conversion, that furtherly deduces the probabilities of potential origin of accretion radiation.
It is carried out that the detectable redshifts are just the property of relativistic emissions, which obviously rise against the theory of cosmological origin. The distribution statistics of observational high redshifts [49,50] might have indicated the redshifts are of property of the emissions rather than that of cosmic reasons.
Theoretically, it will be rarely probable that emission lines of multiple redshifts might be verified in some special observations in that the mechanism implies the probabilities although some of them may be ambiguous perhaps one of them dominates others as has been discussed. In fact, observations on frequency shift and line width and some other aspects of emissions might have present the performances of multiple redshifts. Celestial observations have always brought us surprises, multiple redshift emission might be the new one.
9.4. Broad Lines and Narrow Lines
In the emissions of quite amount of continuous inflow matters, the exciting width that the inflow involved sustains at radial direction may cause specific continuous emission distribution. As a result, that could be certificated to be a broadened line in spectrum diagram. For a massive accretion around a galactic nucleus, the Kepler shear may be employed to interpret the mechanism of inflow of a ring. If there is an inflow of a ring at position with exciting width of , the emission frequency might be distributed from to . Considering the effect of gravitational redshift, one can get a line width expressed by frequency after Eq. (731) that
Case and it could be simplified to be
or by wave length
Case and it could be simplified to be
which could also be amount to a so-called Doppler velocity by frequency as
or Doppler velocity by wave length as
where, is light speed.
Case it could be simplified to be
These equations show that in the regions near to , relativistic emissions should have broader line widths, and in the regions far off the , relativistic emissions should have more narrow line widths. Calculations on line widths of various conditions will be presented in Table 7.
This result forcefully matches the observational dimensions of broad line regions and narrow line regions. It is said that line widths depend on inflow exciting width, but in totally analysis, they highly relate to the inflow positions. The regions close to may emit lines broader than that of farther regions. Observations show that the sizes of broad line regions are estimated within 0.01 or 0.1pc and line widths are about 1000 kms-1 to 10000 kms-1, while the sizes of narrow line regions are about 0.1pc to 1kpc [49,51,52]. In fact, those certificated narrow lines incline to have been certificated as lower redshift lines. For radio emissions, some of them were observed to have compact cores and extended components [51]. The compact cores could be interpreted that equivalent state in inner areas of accretions would have lower equivalent energy to release lower frequency emissions, while some of the giant extended components of emission pictures might be the jet outflow who emit radio lines.
Relativistic release must perform in sophisticated conditions. The most probable condition is that the release in one of the rings could overwhelming all the others, especially that of the most inner ring. Thus, in most cases, releases of an active galactic nucleus might be certificated by the emissions of the sole ring. One can find that most of narrow lines have been certificated lower redshift, such as NGC 4151 with z=0.0033 [53] and MCG-5-23-16 with z=0.00849 [54] have narrow Fe Kα lines. But on the other hand, their spectra both involve with broad lines [55], that indicate controversies in emission line certifications.
The variability, asymmetry, wave length shift and so much as line broadening of emissions of quasars and active nuclei [50] indicate more sophisticated dynamic conditions than imagine.
9.5. Relativistic Absorption
Most of quasars and active galactic nuclei have giant accretion bodies spreading around their equatorial planes. Case a pulse of light ray goes through some parts of an accretion body, that light ray may experience different absorptions due to their passing positions. If a pulse of light crosses several separate rings or blocks of an accretion, it might experience multiple absorptions. Absorption frequencies depend on equivalent state of the matters that have experienced relativistic release, so that the absorption frequencies could be expressed as
and the detectable frequency is
where, is the frequency of absorption line in that the light rays cross throughout a ring located at a position of , and is the absorption frequency case that structure would absorb in no-gravity fields. One can of course calculate the widths of absorption lines just like that of emission lines.
or
where, is absorption width of a ring that the light ray passes across.
or expressed by Doppler velocity in frequency as
or Doppler velocity in wave length as
But more different from emissions, absorption spectra must have more narrow lines and lower redshift than emissions, because the absorption rings are mostly at more outer regions with respect to the inner shining emission source, otherwise they would be difficult to be detected.
As has been discussed above, the inflow of inner rings of accretion may act as key role of entire emissions. So, we can image that brighter inner rings emit light rays, and on our view line, they go through some surrounding rings to be absorbed. It is said that, absorbing dusts might be the matters located at surrounding outer positions rather than those so-called insert bodies far away from the emission areas. This image may lead to the so-called relative blueshift, with respect to that of emission lines. Of course, there might be still seldom absorptions happening in inner areas so that we will also observe relative redshift absorption lines occasionally. Given a separation between emission position and absorption position more exterior, the emission frequency could be calculated as
with redshift of the line
and absorption frequency varies because a separation between absorption and emission positions
so that the redshift of absorption line is
And then, there is a blueshift of an absorption line
Given and , it can be calculated that and 1.66. Here, the absorption lines may show a blueshift of with respect to the emission lines.
It was found that there are both absorption broad line region and absorption narrow line region [56] in single system in which those absorption lines are all corresponding to that of emission lines.
Case a continuum spectrum of light rays passes across multiple rings and arrive at an observatory on the Earth, one can then get a set of multiple frequency shift of absorptions. It is because absorptions only depend on the positions in accretions. This does interpret the multiple redshift absorption lines in tremendous of observations [49,50,51] in those quasars and active galactic nuclei. Especially for that of so-called Lyman-alpha forest [57], a series of regular Lyman-alpha absorption lines, with descending order of redshifts, queue up amazingly at the left side of the great main emission line.
There is a special condition for a matter out flowing from center source, for example the center jet outflow. When a matter at ground state moves a separation toward outer direction, its structural energy should experience energy deficiency in that the energy of equivalent state gets increasing. We then see that the matter is in the state lack of energy, and generally, the state should be kept until surrounding environment happens to emit amount of specific light rays across, so as the result, the matter gets absorptions. It is said that, this kind of absorptions would be far different from normal relativistic absorptions as that have been discussed above, so that they could be called the super relativistic absorption. As for the mentioned absorption energy, it depends on the position it getting absorbing as well as the position it has ever been in ground state. Note that this kind of absorptions really distinguish from the general relativistic absorptions in that the super relativistic absorption energy depends on the difference between the final emission position and specific absorption position, while the general relativistic absorption is due to property of structure state. It could be calculated as
where, , , is the radius at absorption position, and is the radius of the position of equivalent ground state before outflow. This kind of absorption might need greater absorption energy than that of general relativistic absorption. Therefore, it should be called the super relativistic absorption.
To the observer at a farthest position, the absorption line will also perform special frequency shift that
Case the jet flow particles of an active galactic nucleus are assigned in a broad area, it could cause a broader absorption pit for a crossing light ray. One can calculate the average redshift and the width of absorption pit.
Additionally speaking on the topic of jet flow, massive particles may be easily accelerated up and keep approaching absolute light speed so as to escape from inner event horizon. On the other hand, apparent light speed may be at lower level in the nearby area so that to form pseudo super luminal motions. A high pseudo super luminal motion may cause Cherenkov radiation, which could generally show polarized propagation. That might also be the reasons for some high energy light rays. One can imagine that the events of γ-ray burst detection delay in observations on SN1987A [58] and GW170817 [59] might be interpreted by pseudo super luminal propagations of neutrinos and gravitational waves.
Acknowledgement
Great many thanks to whom that I sent them emails for communications years ago early after part of the topics were developed. Thereafter, these researches have been completed in a very long time. I appreciate anyone who would like to download and read this article even though that will be a hard work of weeks or longer to make complicated calculations and comprehensive understandings. And I will highly appreciate them who are going to feedback comments and peer reviews that may help for more communications and cooperation.
References
- A. Einstein, Die Grundlage der allgemeinen Relativitätstheorie, Annalen der Phys., 49,769(1916).
- J. Jost, Riemannian Geometry and Geometric Analysis, Springer –Verlag Berlin Heidelberg, Sixth Edition 2011, (1965).
- T. P. Cheng, Relativity, Gravitation,and Cosmology, Oxford University Press (2005).
- N. Straumann, General Relativity, Springer Science + Business Media Dordrecht( 2004, 2013).
- L. P. Eisenhart, Riemannian geometry, Princeton University Press, Eighth Printing 1997, (1925).
- П.К.Рашевский, Riemannian Geometry and Tensor Analysis, Technique and Theory Press, (1953).
- C. Huang, General Relativity Lecture Sheet, China Science Press (2023).
- A. Einstein, Zur Elektrodynamik bewegter Körper, Ann. Physik, 17,891(1905).
- H. Minkowski, Nachr. Ges. Wiss. Göttn Math.-Phys. Kl. 53 (1908).
- Y. Yu, General Relativity, Peking University Press (1997).
- H. Jin, Introduction to General Theory of Relativity, Zhejiang University Press (2022).
- B. Chen, General Relativity, Peking University Press (2018).
- C. E. Weatherburn, An Introduction to Riemannian Geometry and the Tensor Calculus, Cambridge University Press, (1942).
- R. Pound, G. Rebka, Gravitational Red-shift in Nuclear Resonance, Physical Review Letters. 3 (9): 439–441 (1959). [CrossRef]
- R. Vessot, M. Levine; E. Mattison et al., Test of Relativistic Gravitation with a Space-Borne Hydrogen Maser, Physical Review Letters. 45 (26): 2081–2084(1980). [CrossRef]
- T. Do, et al., Relativistic Redshift of the Star S0-2 Orbiting the Galactic Center Supermassive Black Hole, Science. 365 (6454) (2019). [CrossRef]
- S. Weinberg, Gravitation and Cosmology, Principles and Applications of the General Theory of Relativity, John Wiley (1972).
- R. Peierls, More Surprises in Theoretical Physics, Princeton Univ. Press (1991).
- H. Minkowski, Nachr. Ges. Wiss. Göttn Math.-Phys. Kl. 53 (1908).
- M. Abraham, Rend. Circ. Matem. Palermo 28, 1 (1909).
- A. Einstein, A centenary volume letter to M. Besso, 1951(p.138).
- U. Leonhardt, Optics: Momentum in an Uncertain Light, Nature, 444:823–824 (2006). [CrossRef]
- M. Froeschle, F. Miguard, F. Arenon, in Proceedings of the Happarcos Venice 1997 Symposium, ESA Publications Division, Noordwijk (1997).
- J. Roche, What is mass? European Journal of Physics, 26:1–18(2005). [CrossRef]
- Q, Xu, Z. Liu, Ordinary Differential Equations Analytical Methods and Numerical Methods, Publishing House of Electronics Industry, China (2022).
- B. B. Perera, M. A. McLaughlin, M. Kramer etc., The Evolution of PSR J0737-3039B and a Model for Relativistic Spin Precession, the Astrophysical Journal, 721: 1193-1205(2010). [CrossRef]
- P. Landry, B. Kumar, Constraints on the Moment of Inertia of PSR J0737-3039A from GW170817, arxive: 1807. 04727v2 [gr-qc] 10 Oct 2018. [CrossRef]
- C. W. F. Everitt etc., Gravity Probe B: Final Result of a Space Experiment to Text General Relativity, Phys. Rev. Lett., 106(22): 221101(2011).
- J.H. Taylor, L.A. Fowler, and P.M. McCulloch, Measurements of General Relativistic Effects in the Binary Pulsar PSR1913+16, Nature, 277:437 (1978). [CrossRef]
- R. Abuter, A. Amorim, N.Anugu etc., Detection of the Gravitational Redshift in the Orbit of the Star S2 Near the Galactic Centre Massive Black Hole, Astronomy & Astrophysics, 615, L15:1-10(2018). [CrossRef]
- Victor M.L., Riccardo D.M., Ivan M. etc., Future prospects for measuring 1PPN parameters using observations of S2 and S62 at the Galactic Center, arxive: 2410. 22864v2 [astro-ph.GA] 28 Jan 2025.
- I. I. Shapiro, Fourth Test of General Relativity. Physical Review Letters. 13 (26): 789–791 (1964). [CrossRef]
- I. I. Shapiro, M. E. Ash, R. P. Ingalls etc., Fourth Test of General Relativity: New Radar Result. Physical Review Letters. 26 (18): 1132–1135 (1971). [CrossRef]
- E. E. Salpeter, Accretion of interstellar matter by massive objects. Astrophys. J., 140, 796–800, doi:10.1086/147973 (1964). [CrossRef]
- Y. B. Dovich, and I. D. Novikov, The radiation of gravity waves by bodies moving in the field of a collapsing star. Sov. Phys. Dokl., 9, 246 (1964).
- S. Kato, J. Fukue, S. Mineshige, Black-hole Accretion Disks, Kyoto University Press (2008).
- R. D. Blandford, H. Netzer, L. Woltjer, Active galactic nuclei, Saas-Fee Advanced Course 20, Lecture Notes 1990, Swiss Society for Astrophysics and Astronomy, Springer-Verlag Berlin Heidelber (1990).
- N. I. Shakura, R. A. Sunyaev, Black holes in binary systems. Observational appearance. Astron. Astrophys., 24, 337–355 (1973).
- S. L. Shapiro, A. P. Lightman, and D. M. Eardley: Astrophys. J. 204 187 (1976).
- B. Sicardy, Dynamics of planetary rings, Lect. Notes Phys. 682, 183–200 (2006).
- J. C. Maxwell, On the Stability of the Motions of Saturn’s Rings, Cambridge and London: MacMillan and Company. Reprinted in Scientific Papers of James Clerk Maxwell, Vol. 1, Cambridge University Press (1890).
- S. Charnoz, A. Croda, R. Hyodo, Rings in the Solar System: a Short Review, arxiv, 201805.08963 (2018).
- L. W. Esposito, Composition, Structure, Dynamics, and Evolution of Saturn’s Rings, Annu. Rev. Earth Planet. Sci. 38,383-410 (2010). [CrossRef]
- D. Miner, R. R. Wessen, J. N. Cuzzi, Planetary Ring Systems, Praxis Publishing Ltd., Chichester, UK (2007).
- B. Lee, R. Chary, Insights into Physical Conditions and Magnetic Fields from High Redshift Quasars, arxive: 2207. 07290v1 [astro-ph.GA] 15 Jul 2022. [CrossRef]
- Event Horizon Telescope Collaboration, First M87 event horizon telescope results. I. The shadow of the supermassive black hole, ApJ, 875, L1, 17 (2019).
- C.T. Donnan, D.J. Mcleod, J.S. Dulop ect., The Evolution of the Galaxy UV Luninosity Function at Reshift z≈8-15 from Deep JWST and Ground-based Near-infrared Imaging, arxive: 2207. 12356v3 [astro-ph.GA] 24 Nov 2022.
- L.Y. Yung, R.S. Somerville, S.L. Finkelstein ect., Are the Ultra-high-redshift Galaxies at z>10 Surprising in the Context of Standard Galaxy Formation Models? arxive: 2304. 04348v2 [astro-ph.GA] 11 Nov 2023. [CrossRef]
- K. Huang, Quasars and Active Galactic Nuclei, China Science and Technology Press, (2005).
- B. M. Peterson, An introduction to active galactic nuclei, Cambridge University Press (1997).
- V. Beckmann, Chris shrader, Active galactic nuclei, WILEY-VCH Verlag GmbH & Co. KGaA, Boschstr. 12, 69469, Weinheim, Germany (2012).
- D. E. Osterbrock, Emission-line spectra and the nature of active galactic nuclei, proceedings of a conference held at the Georgia State University, Springer-Verlag, 1-18 (1987).
- M.C. Bentz, P.R. Williams, T. Treu, The Broad Line Region and Black Hole Mass of NGC 4151, arxive: 2206. 03513v1 [astro-ph.GA] 7 Jun 2022. [CrossRef]
- R. Serafinelli, A. Marinucci, A.D. Rosa etc., A Remarkably Stable Accretion Disk in the Sefert Galaxy, arxive: 2309. 06092v1 [astro-ph.HE] 12 Sep 2023.
- V. Liu, A. Zoghbi, J.M. Miller, Dectection of Asymmetry in the Narrow Fe Kα Line in MCG-5-23-16 with Chandra, arxive: 2312. 16354v2 [astro-ph.HE] 4 Jan 2024.
- H. Netzer, The Physics and Evolution of Active Galactic Nuclei, Cambridge University Press (2013).
- R. Lynds, The Absorption-line spectrum of 4c 05.34, Astrophysical Journal, vol. 164, p.L73 (1971).
- K. Hirata et al., Observation of a Neutrino Burst from the Supernova SN1987a, Phys. Rev. Lett., 58:1490-1493(1987). [CrossRef]
- B. P. Abbott et al., GW170817: Observation of Gravitational Waves from a Binary Neutron Star Inspiral, Phys. Rev. Lett., 119:161101(2017). [CrossRef]
Figure 1.
Center source field.
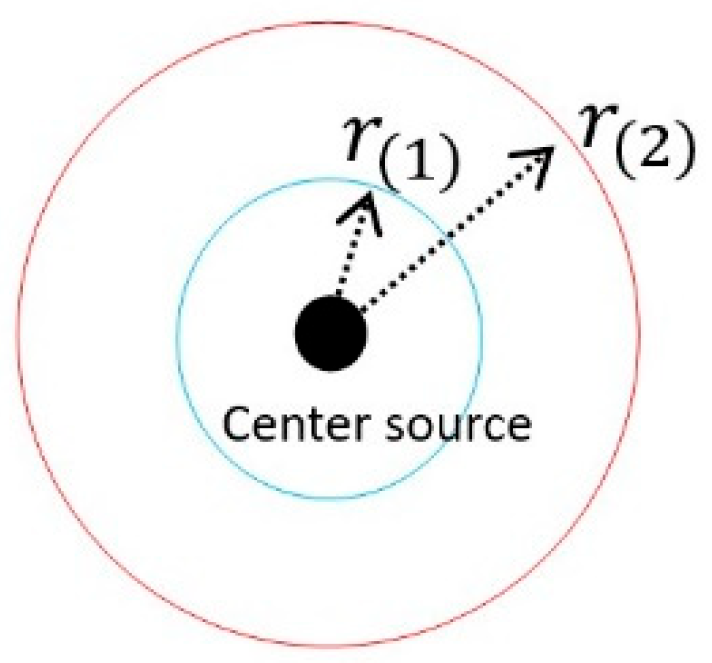
Figure 2.
World lines for a pulse of photons.
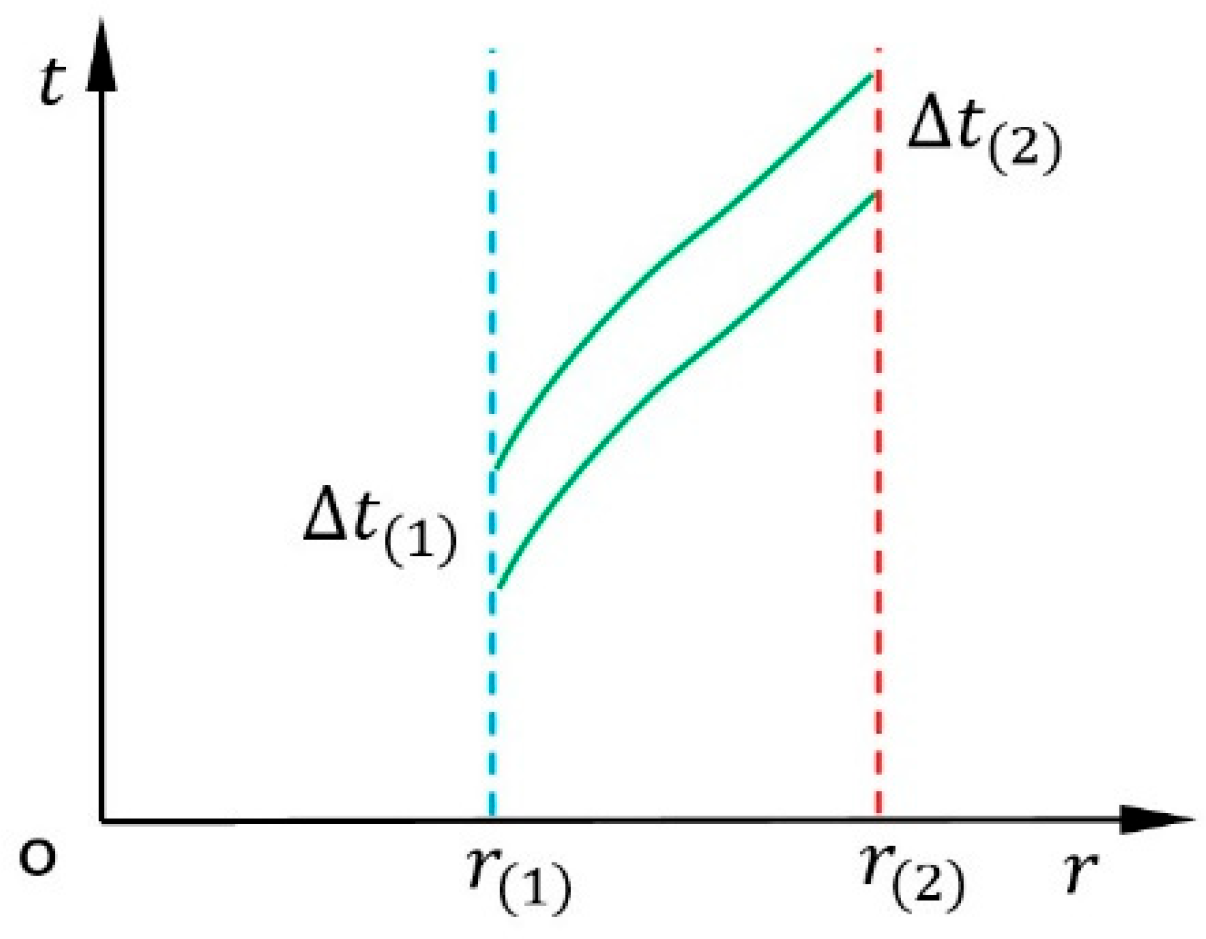
Figure 3.
A super surface as covariant space in 3-dimensional space.
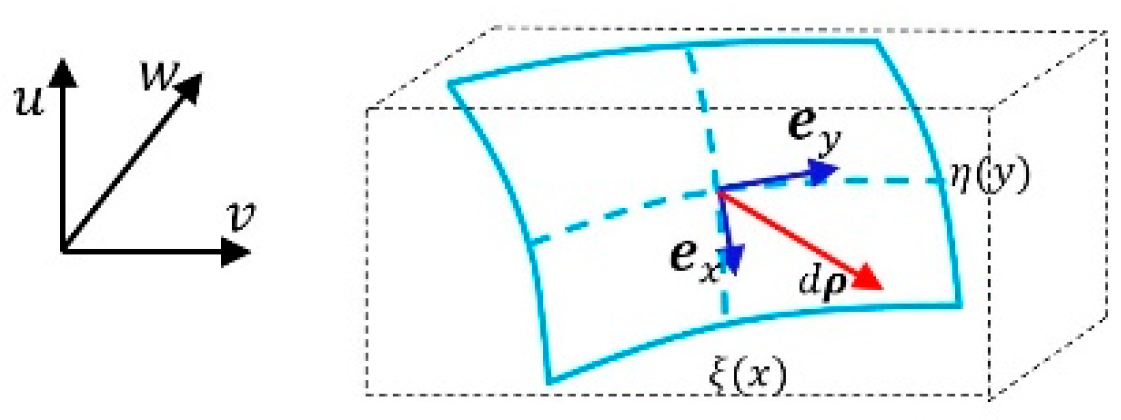
Figure 4.
A coordinate plane as contra variant space in 3-dimensional space.
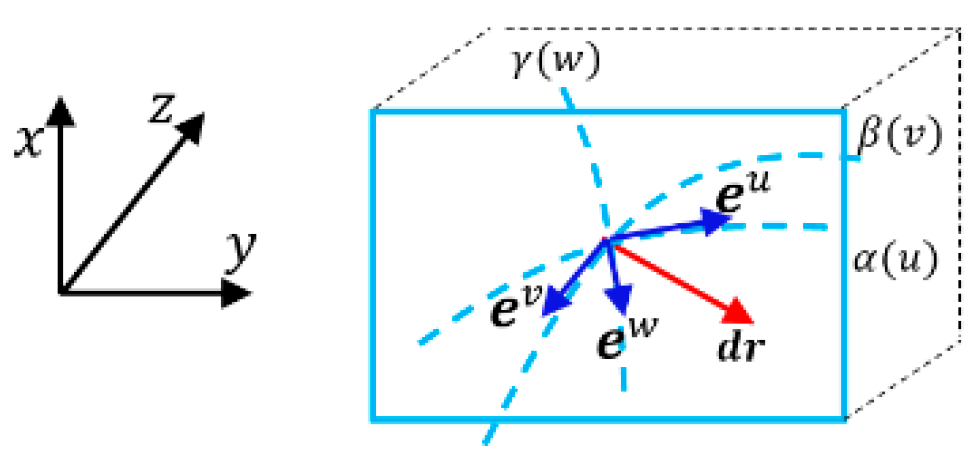
Figure 5.
Covariant tangent space.
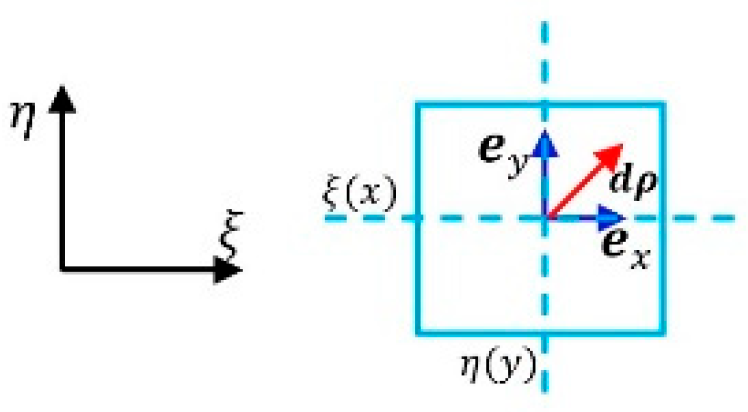
Figure 6.
Contra variant tangent space.
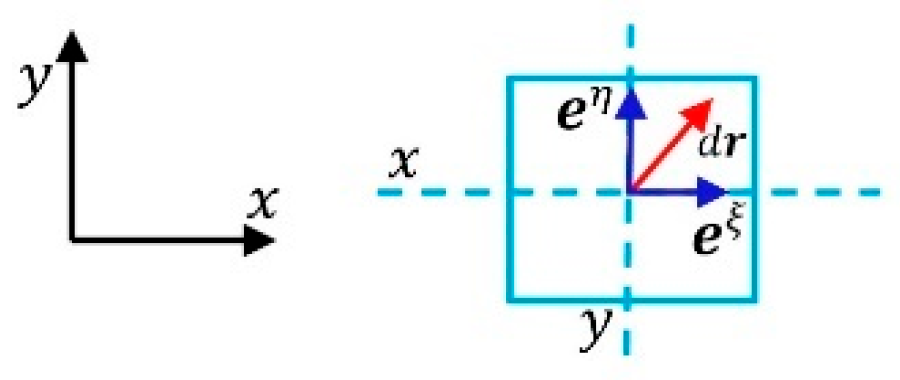
Figure 7.
Covariant space.
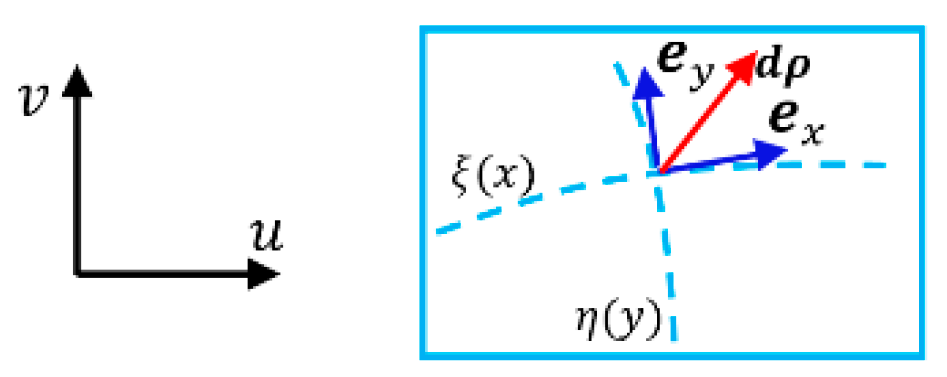
Figure 8.
Contra variant space.
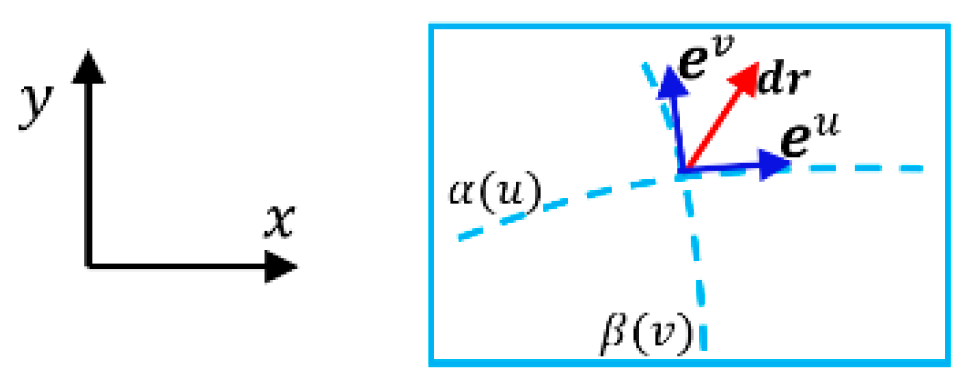
Figure 9.
Bases vary in different paths.
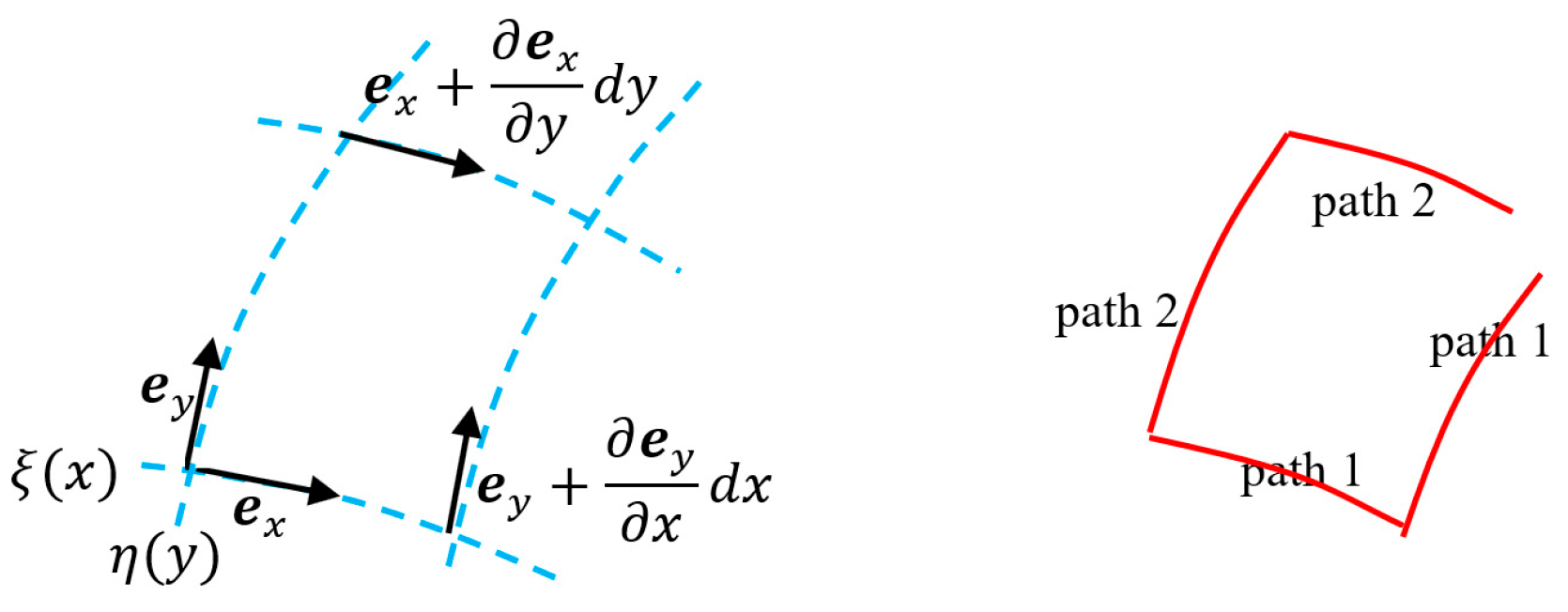
Figure 10.
Closed paths in contra variant space.
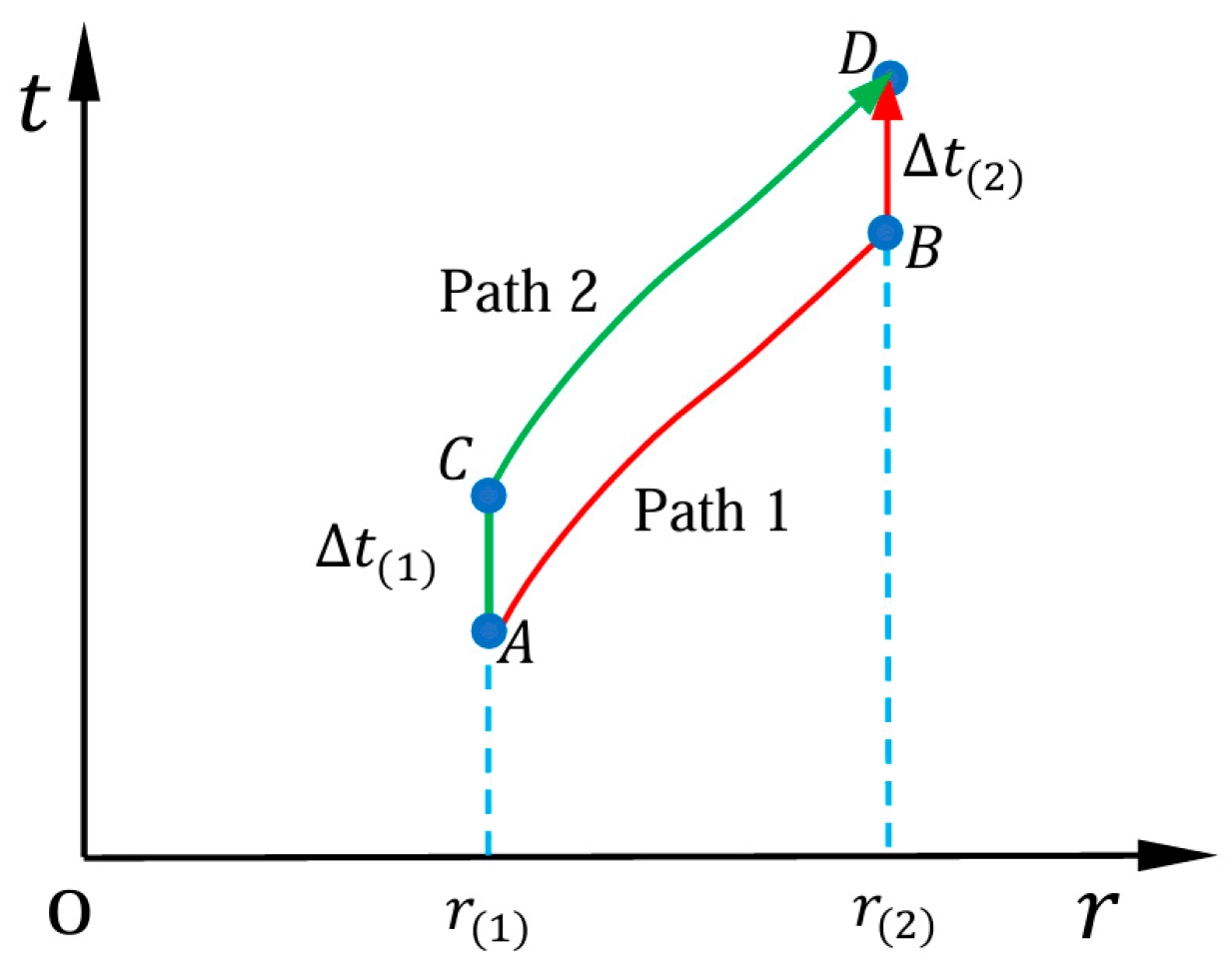
Figure 11.
A presentation of closure error in the thought experiment of light pulse.
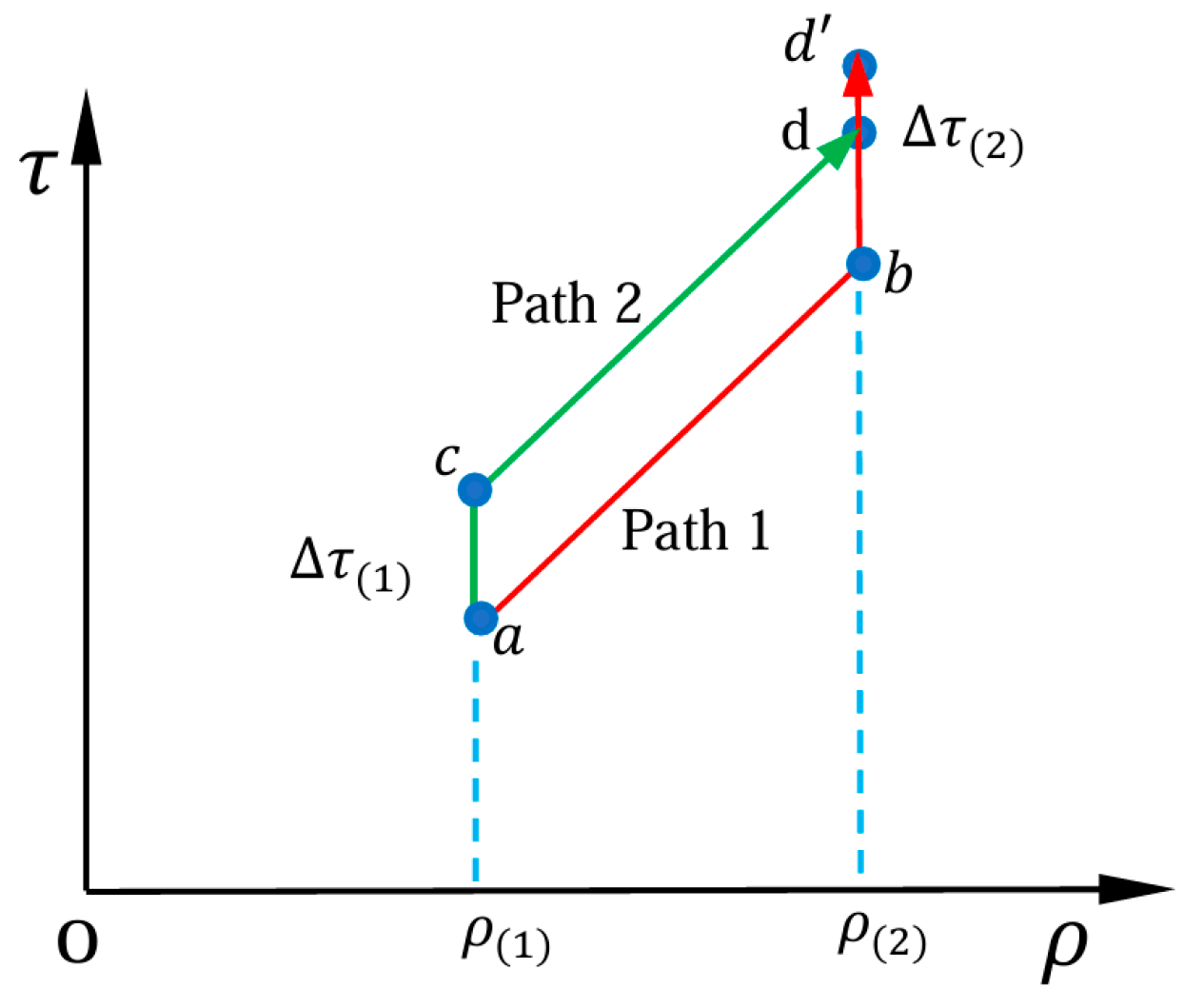
Figure 12.
Covariant space.
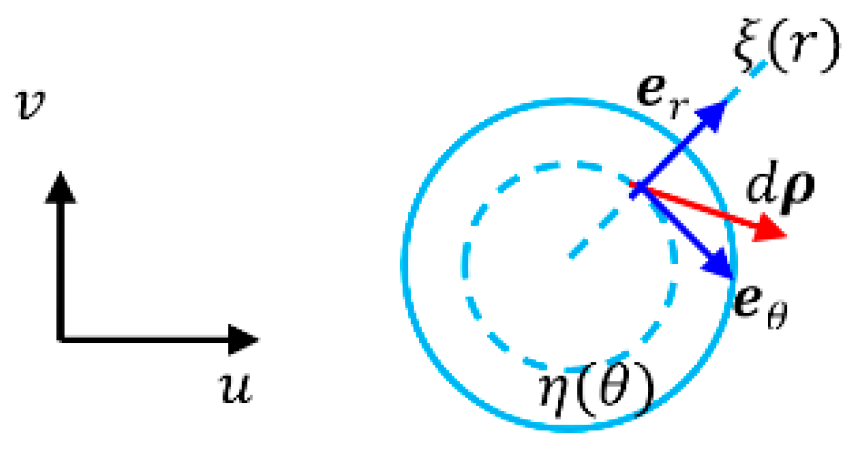
Figure 13.
Contra variant space.
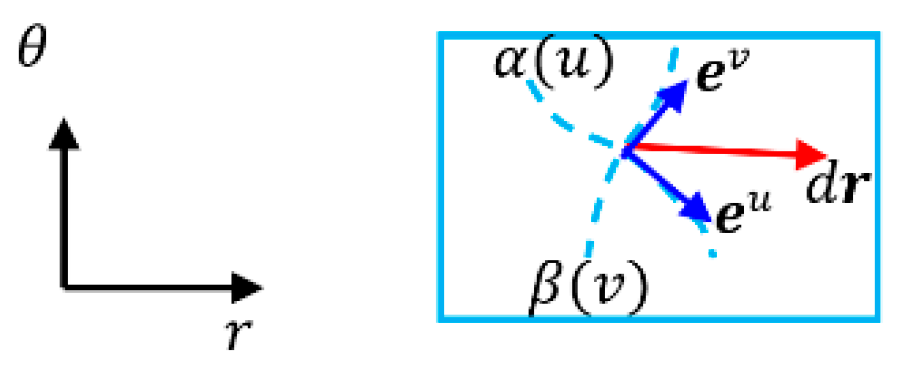
Figure 14.
Covariant space.
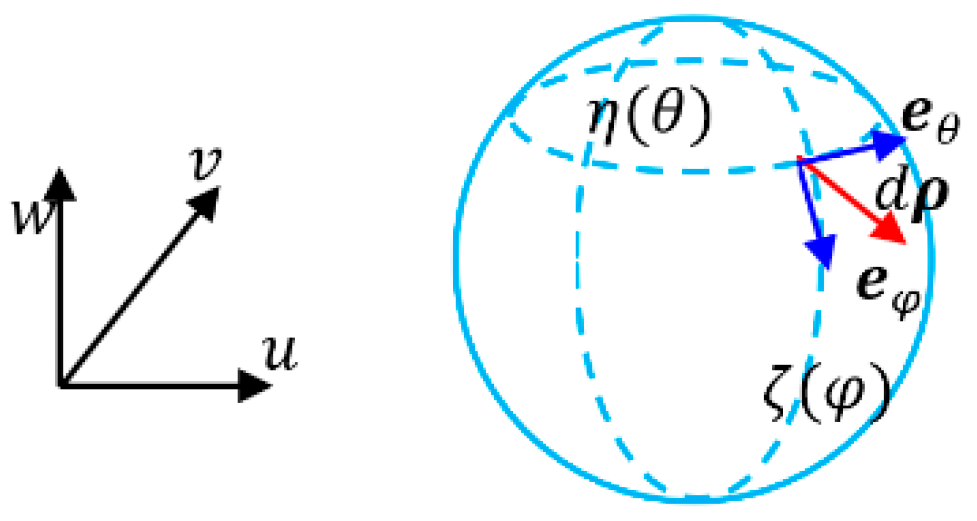
Figure 15.
Contra variant space.
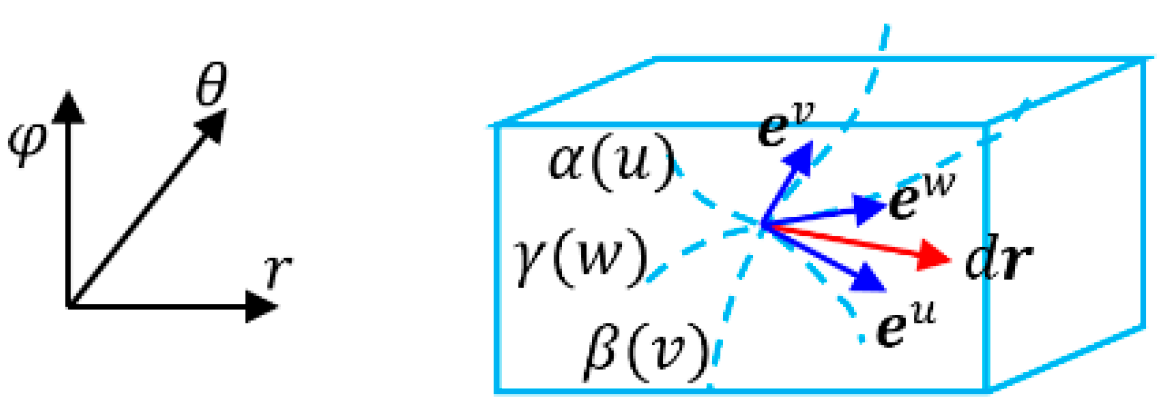
Figure 16.
Covariant space.
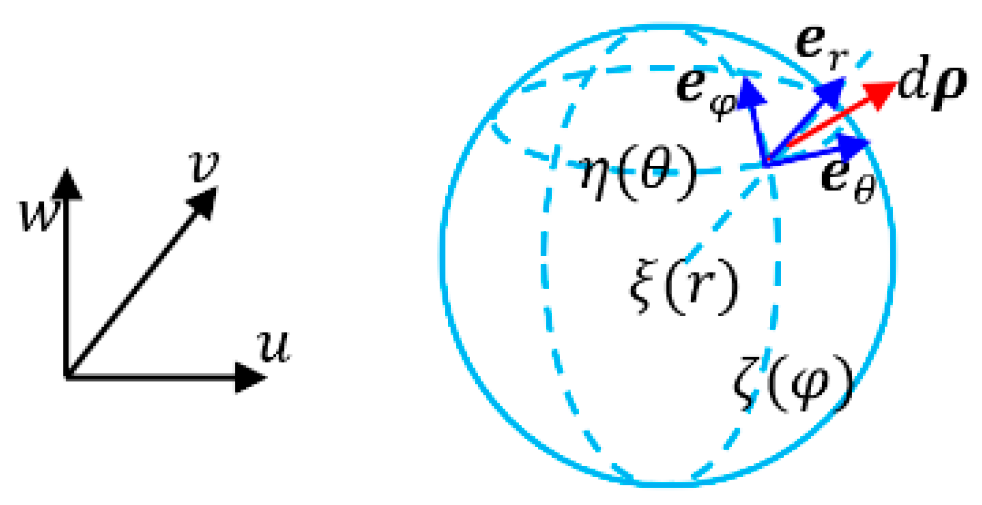
Figure 17.
Contra variant space.
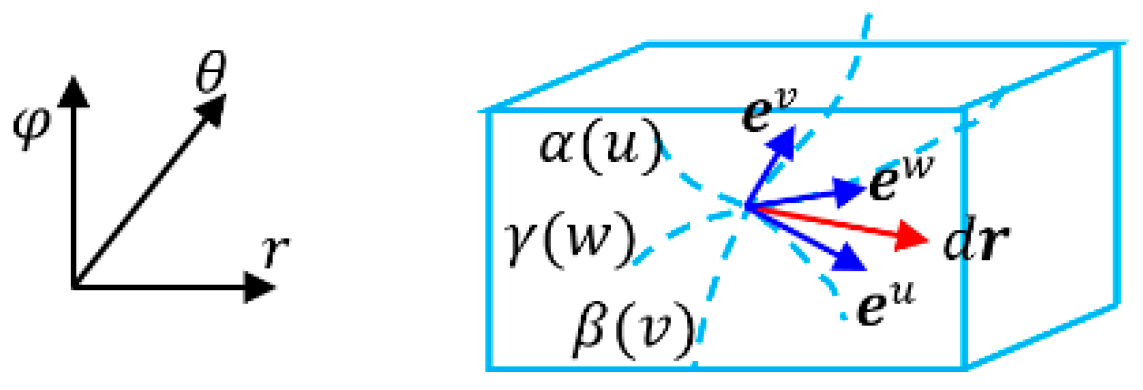
Figure 18.
A photon traveling in center source field.
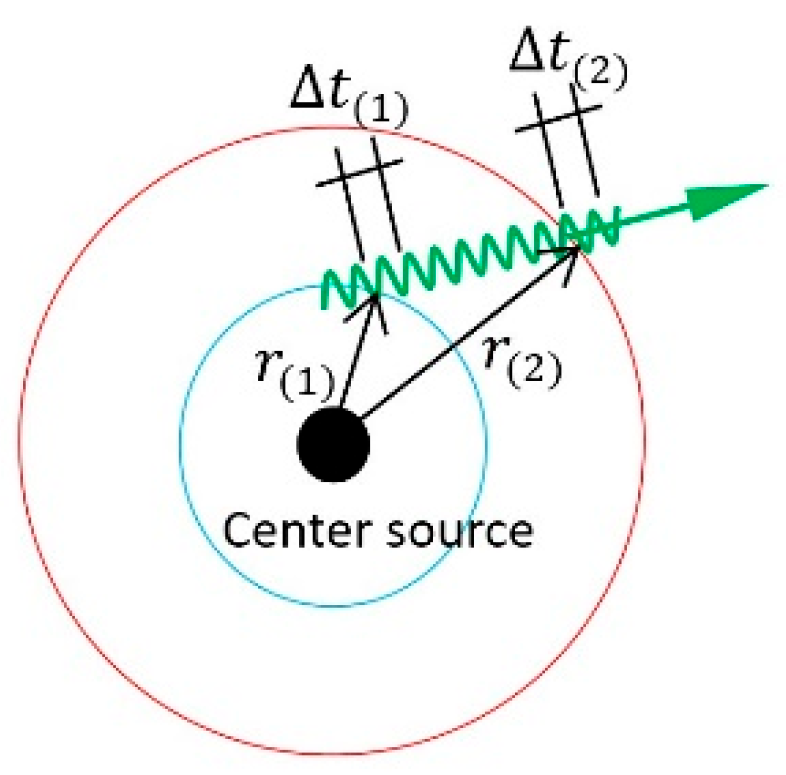
Figure 19.
Free falling measurement.
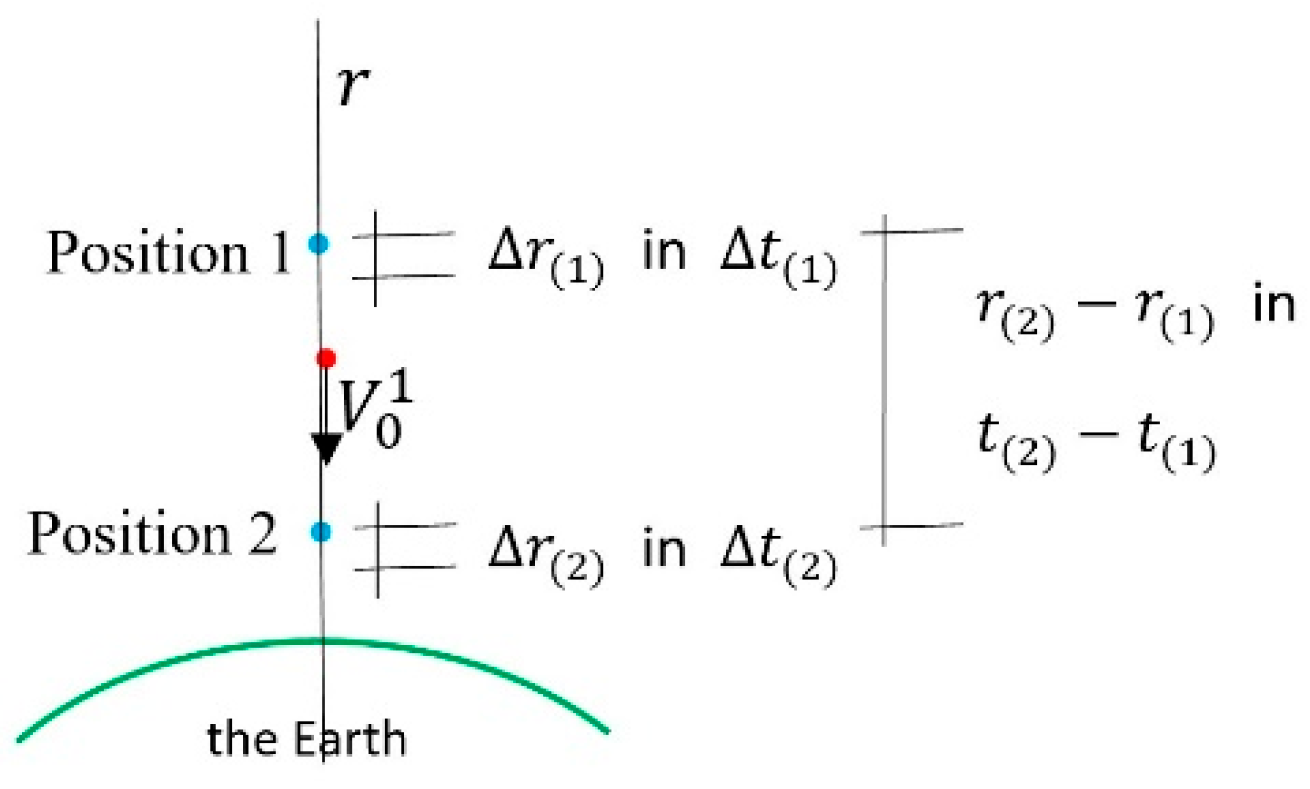
Figure 20.
Light rays passing across the Sun.

Figure 21.
Detailed relationships for angles of light rays and view lines and coordinates.
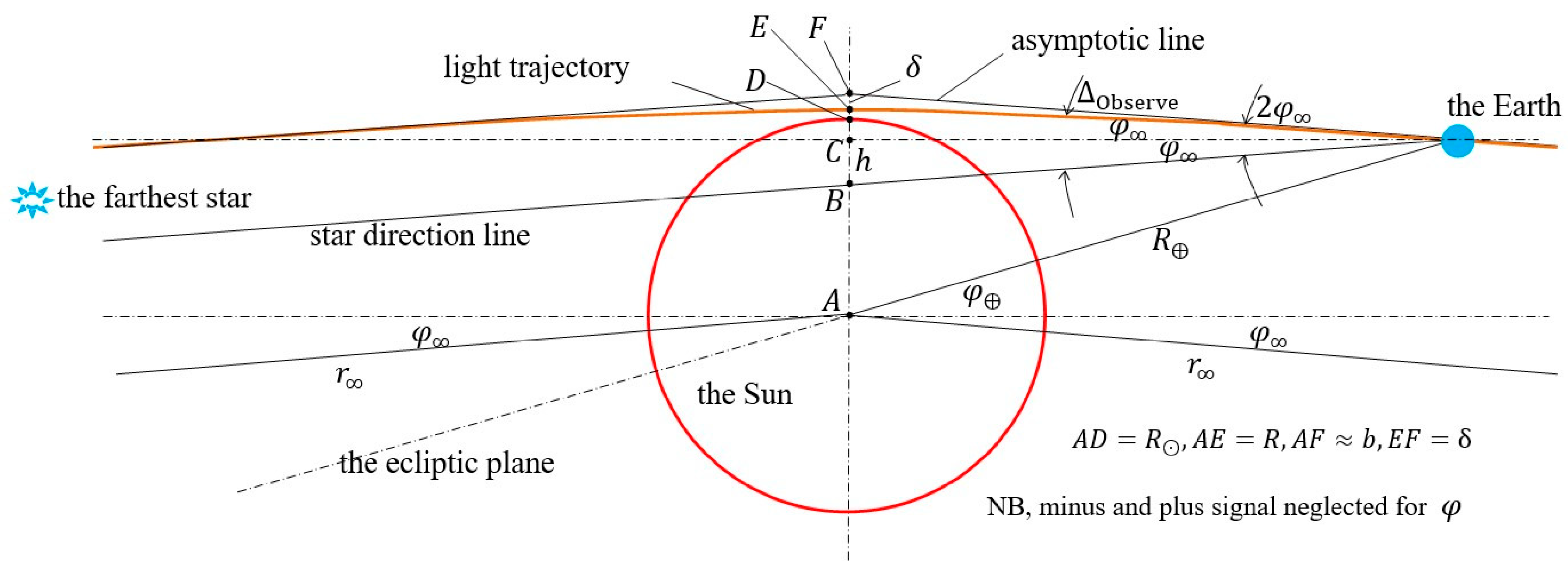
Figure 22.
Asymptotic line with an overplayed
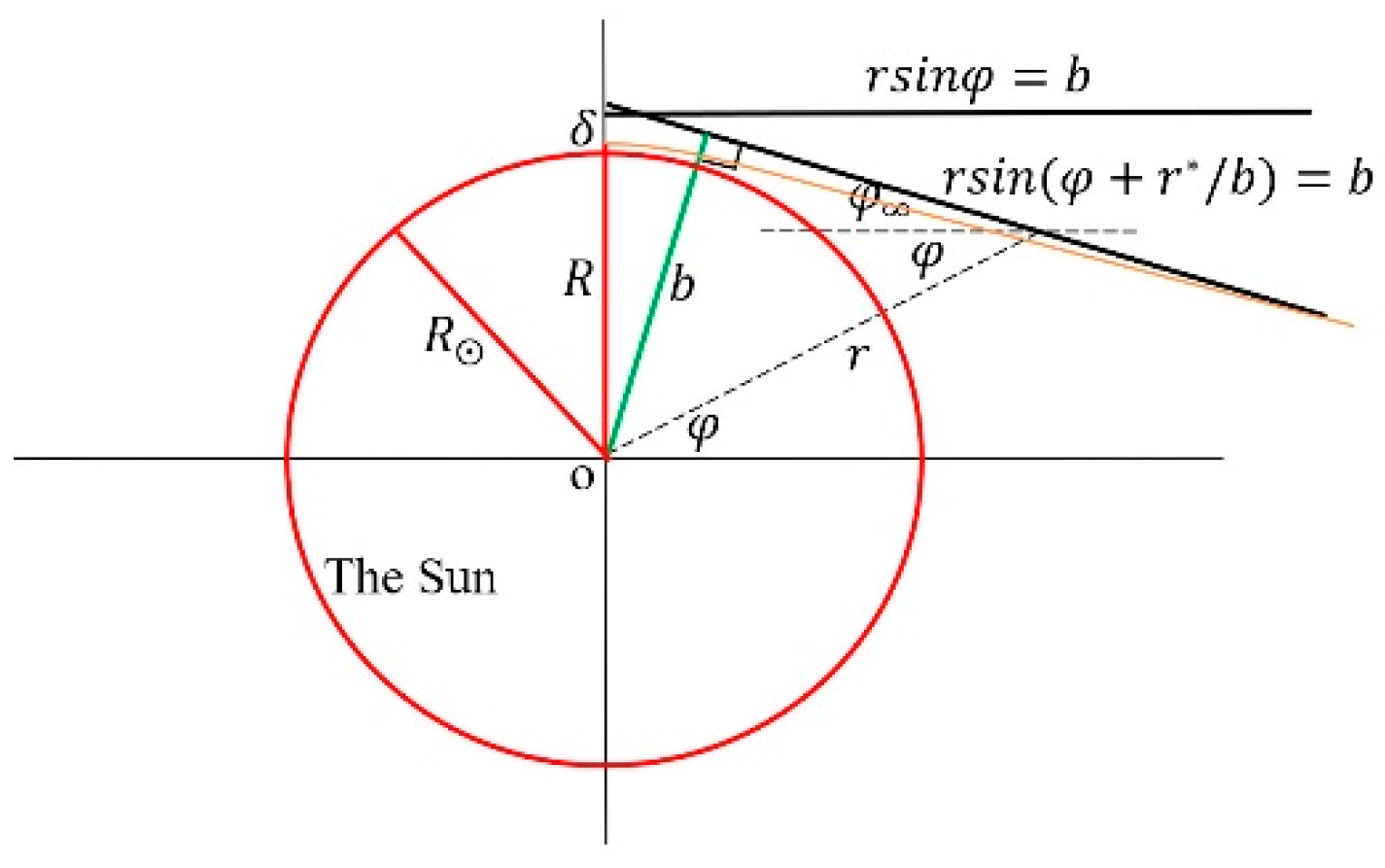
Figure 23.
The trajectory of planet.
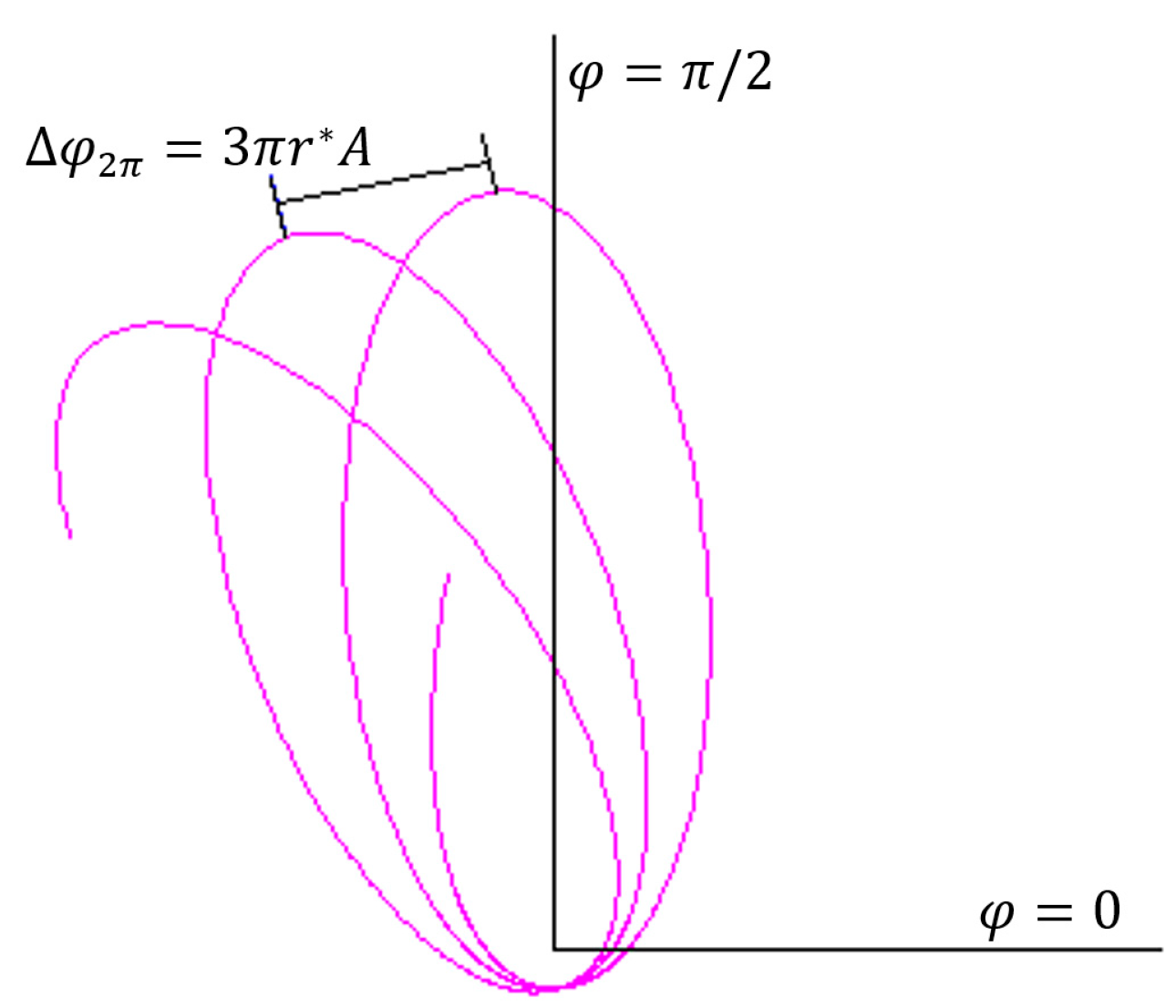
Figure 24.
Comparison of simplified solution and entire solution in the third quadrant.
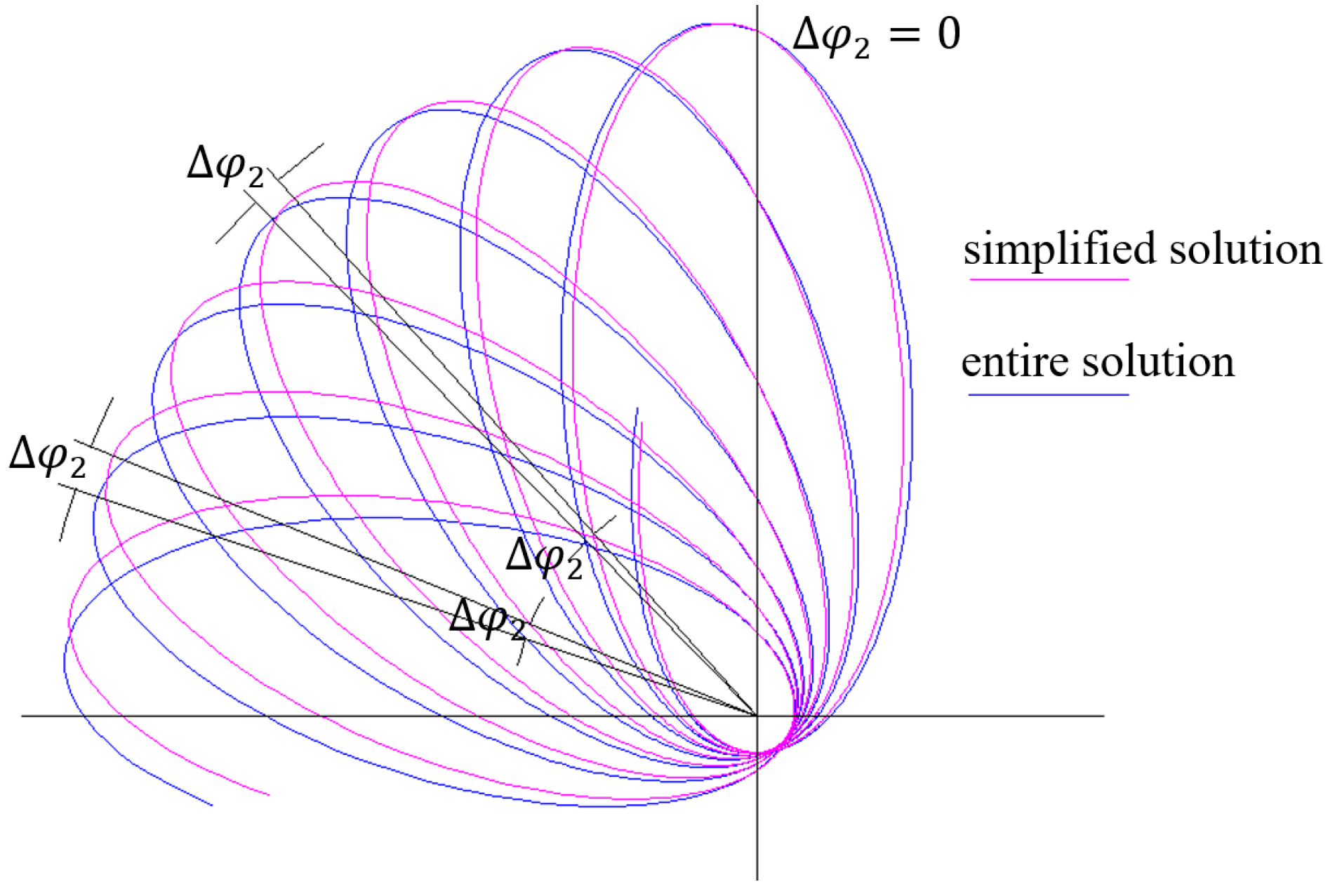
Figure 25.
Comparison of precessions in a giant circulation.
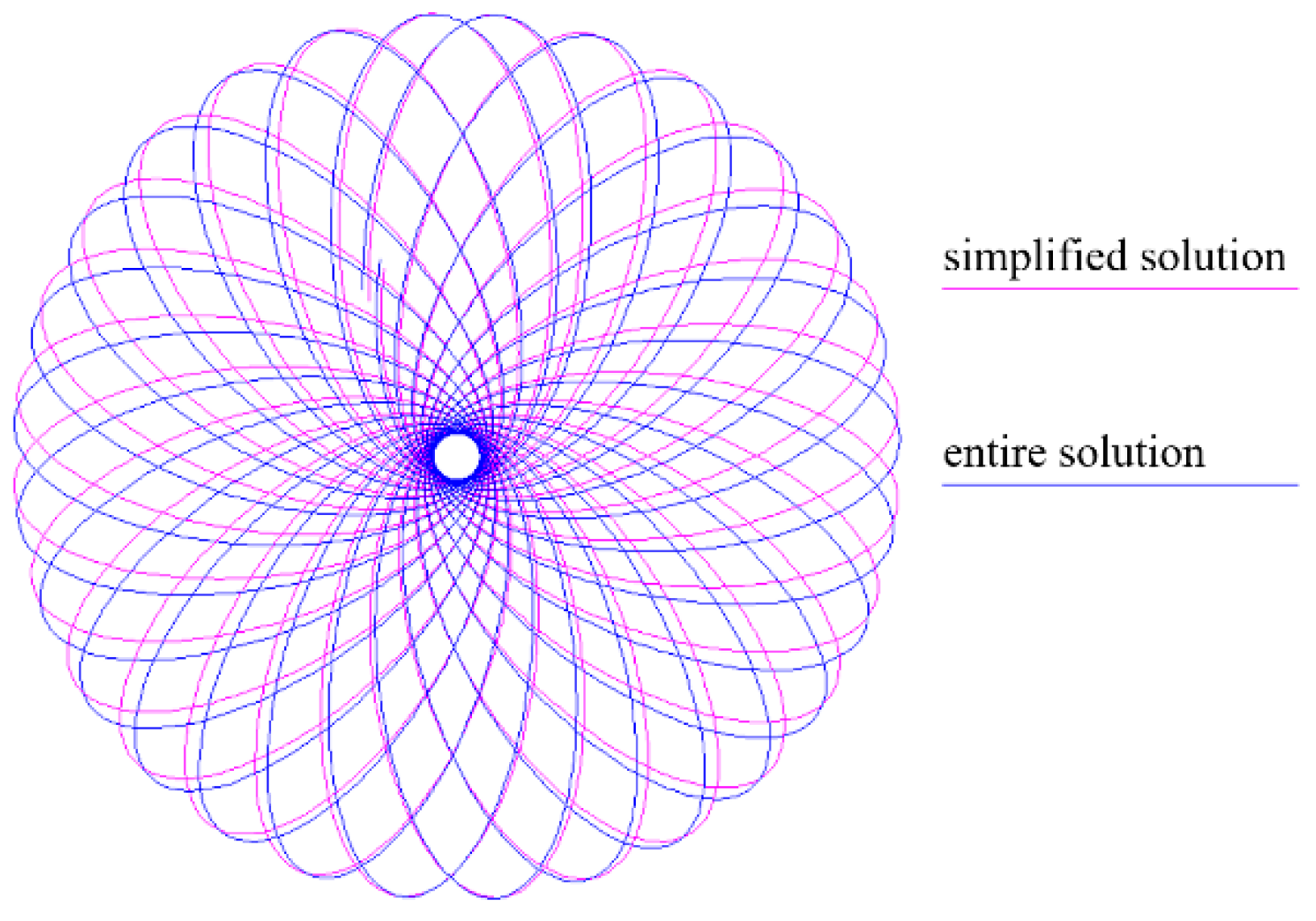
Figure 26.
The renovated trajectory of solar planet.
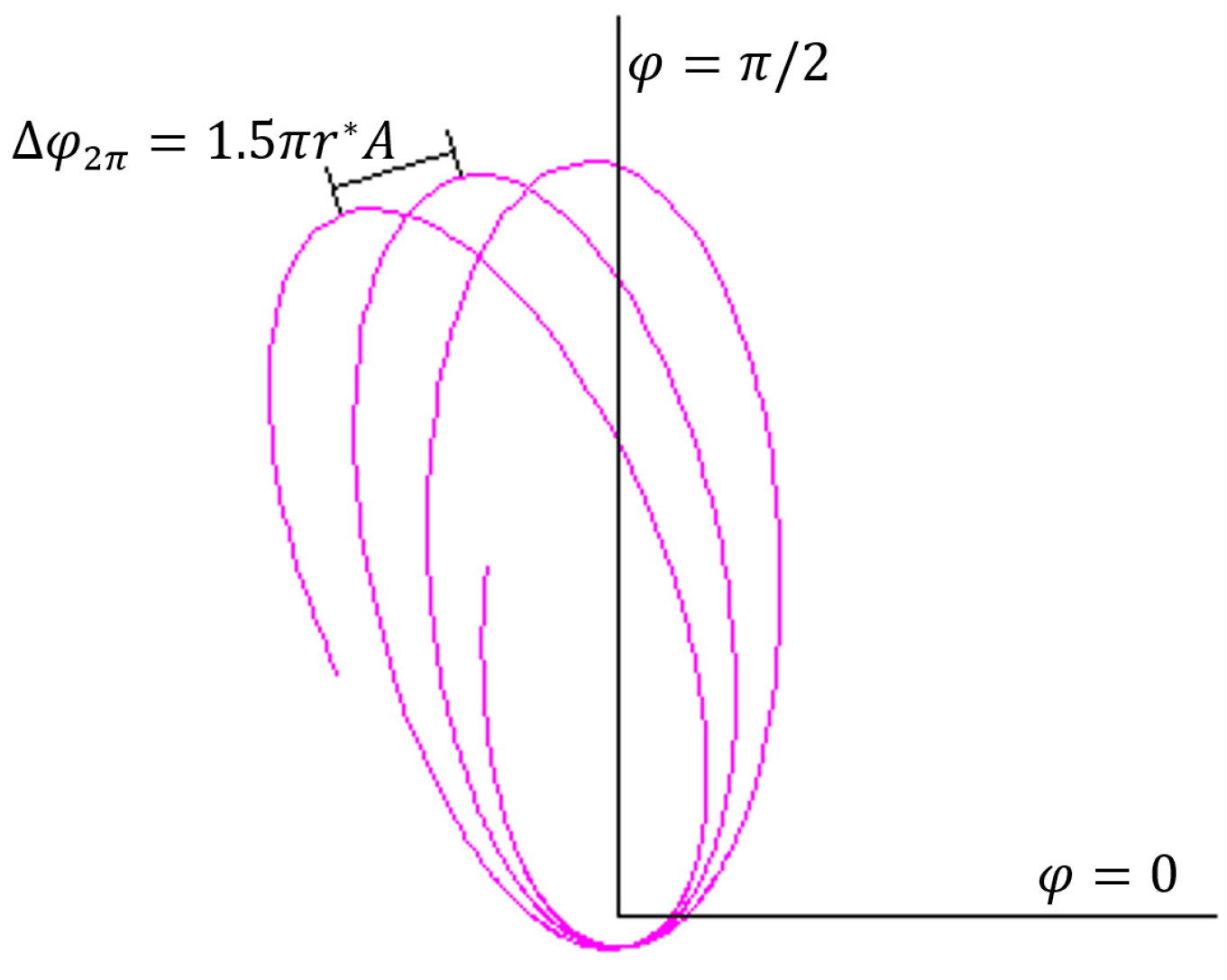
Figure 27.
A diagram of ballistic method for a close-to-light-speed motion.
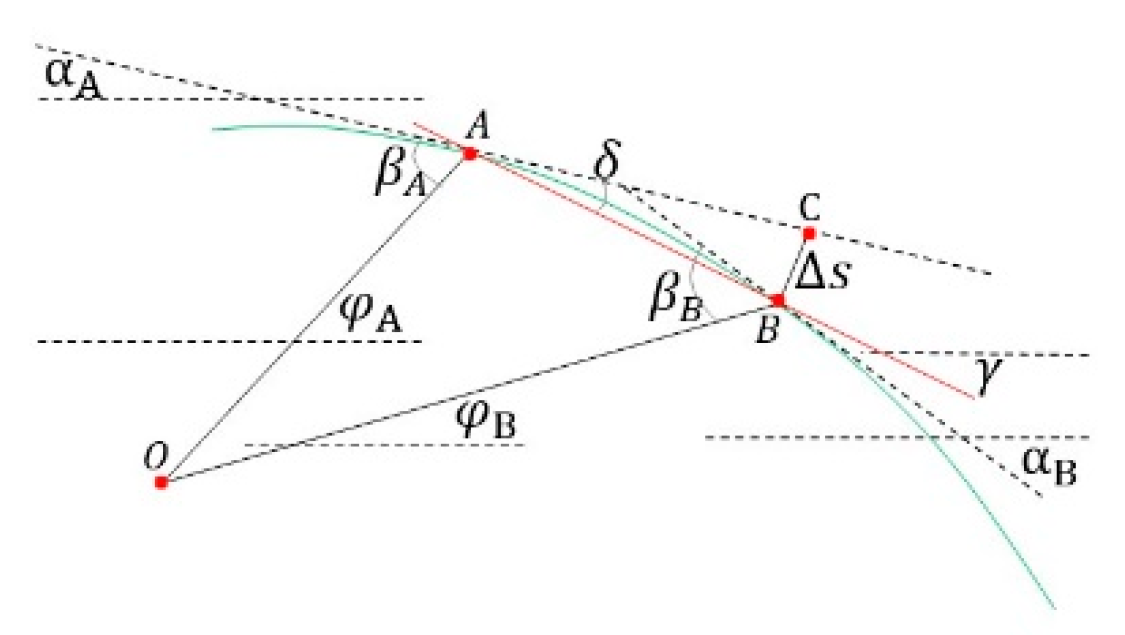
Figure 28.
Probability of ballistic trajectory method for light deviation.
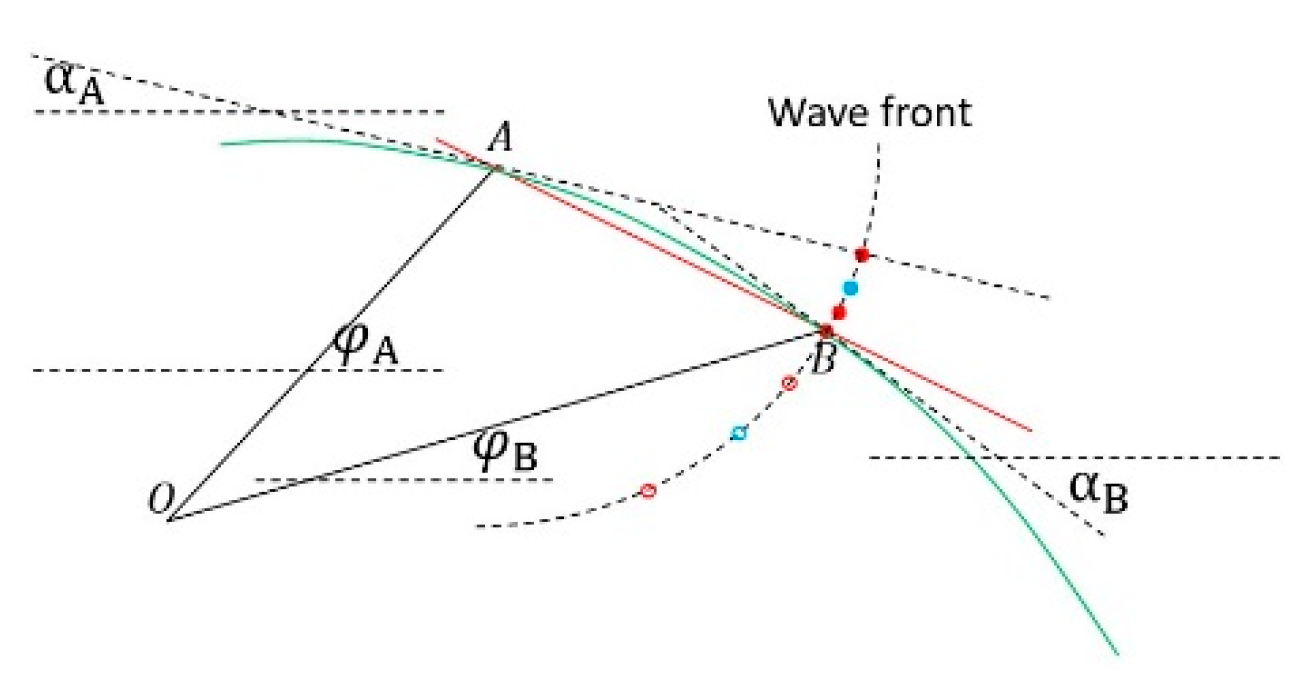
Figure 29.
Light momentum vectors on the trajectory.
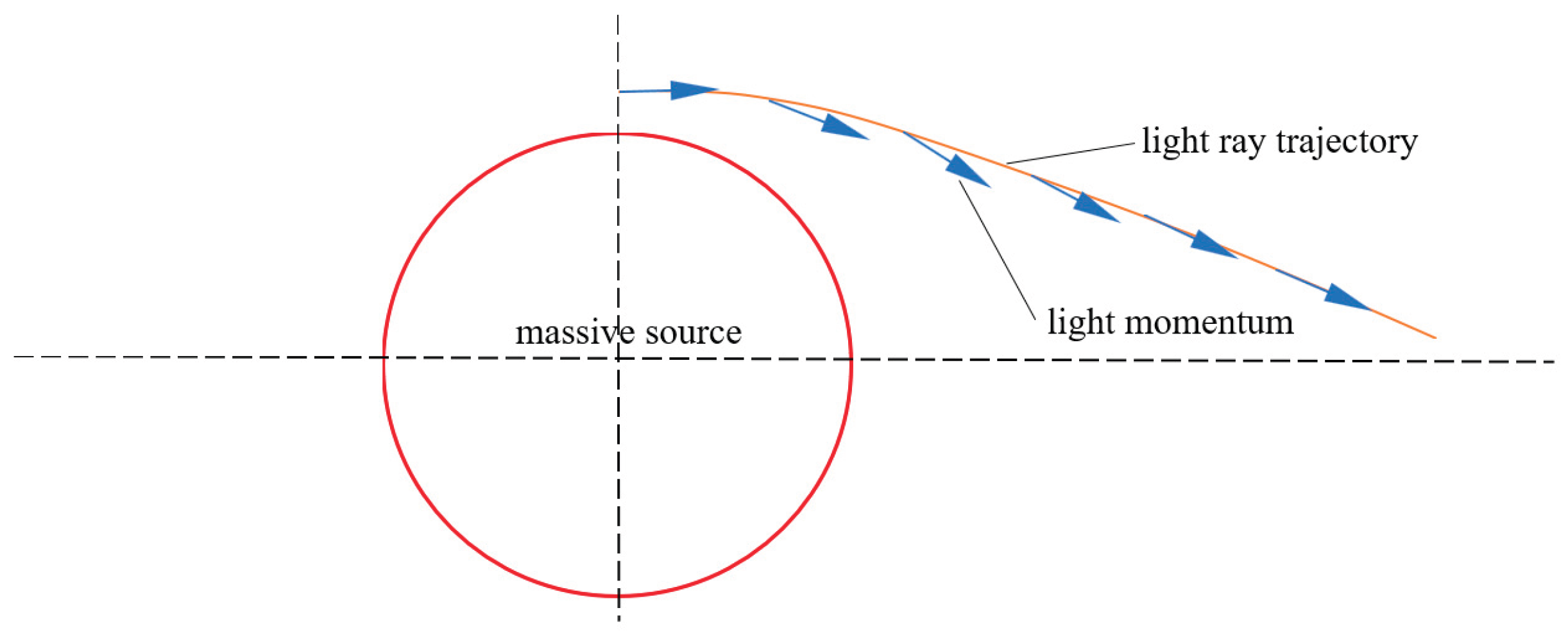
Figure 30.
Fluid ring in one source field.
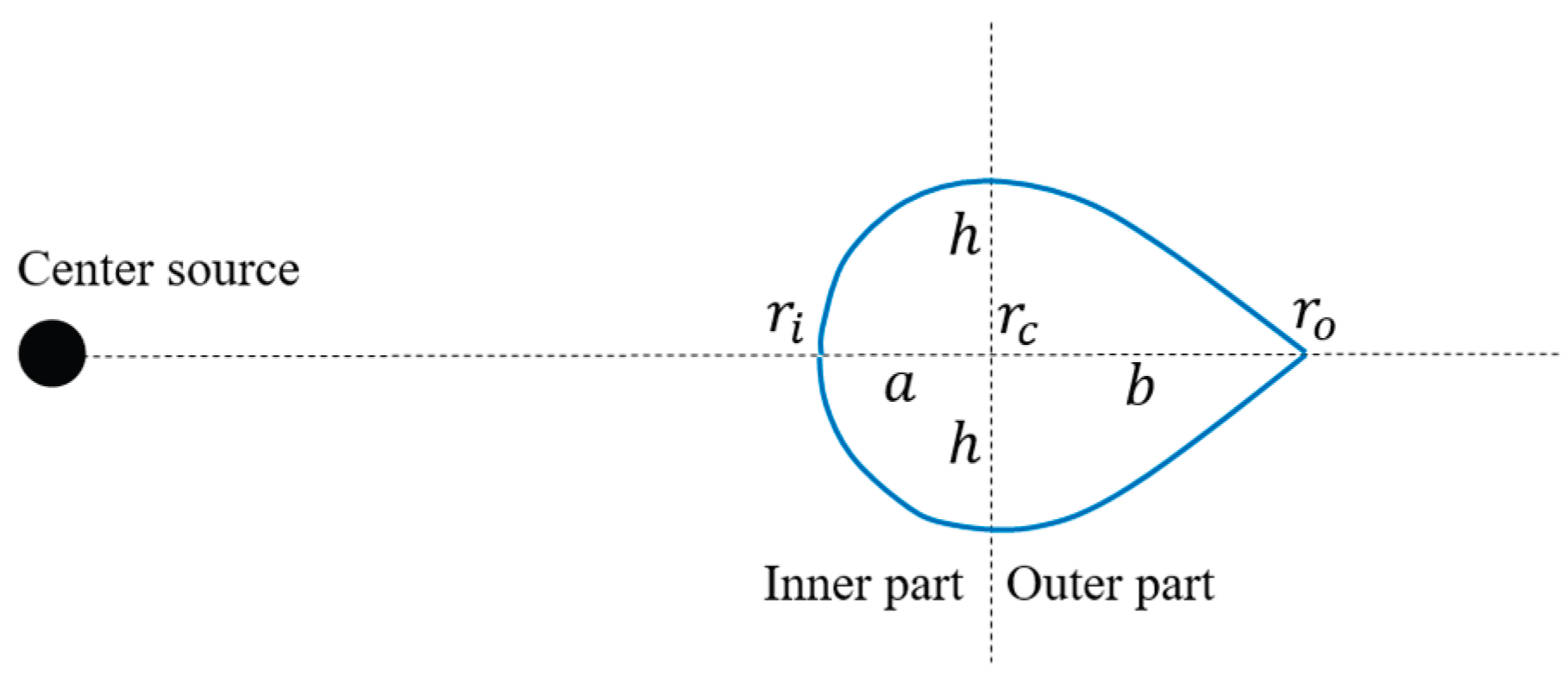
Figure 31.
Driving condition with no shear motion in inner part. (Note, the curved line of cross section of the ring is an imaginary result probable, concerning variable density).
Figure 31.
Driving condition with no shear motion in inner part. (Note, the curved line of cross section of the ring is an imaginary result probable, concerning variable density).
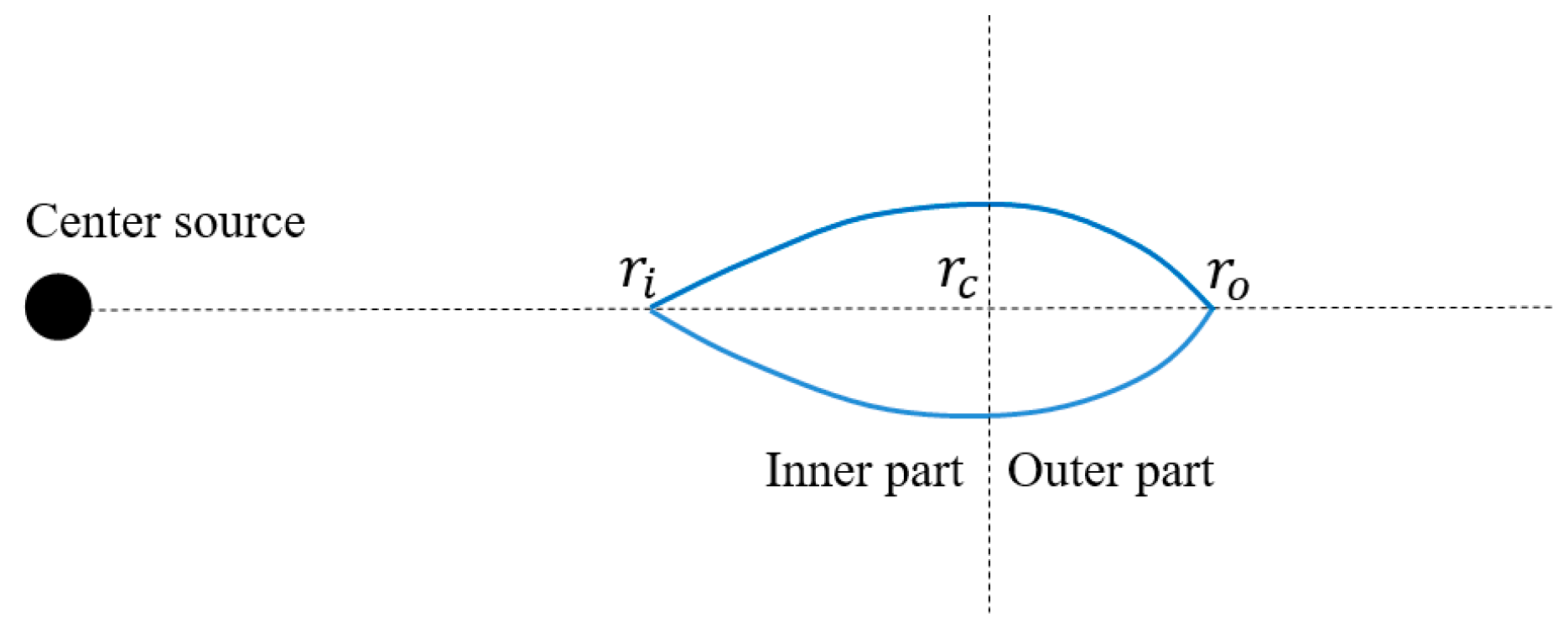
Figure 32.
Angular momentum conversion between neighboring rings.
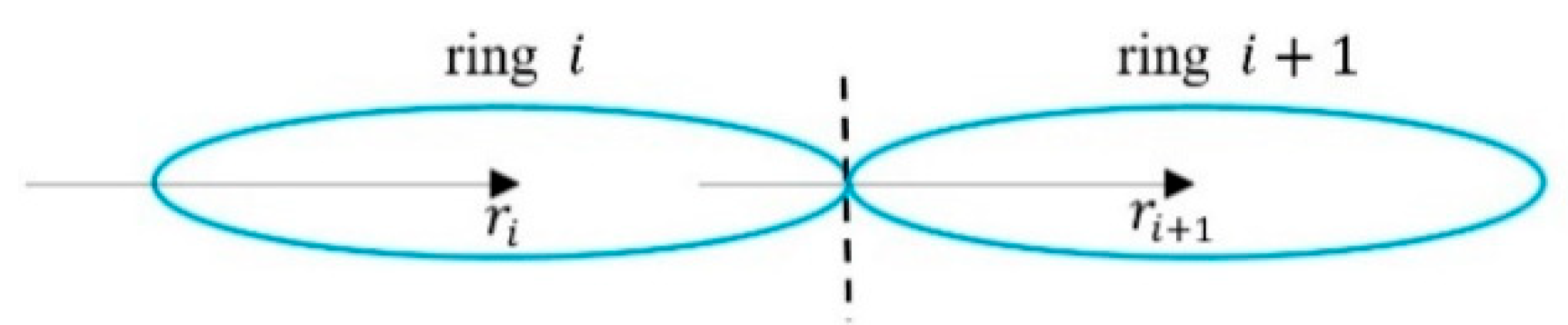
Figure 33.
Release distribution and accretion luminosity.
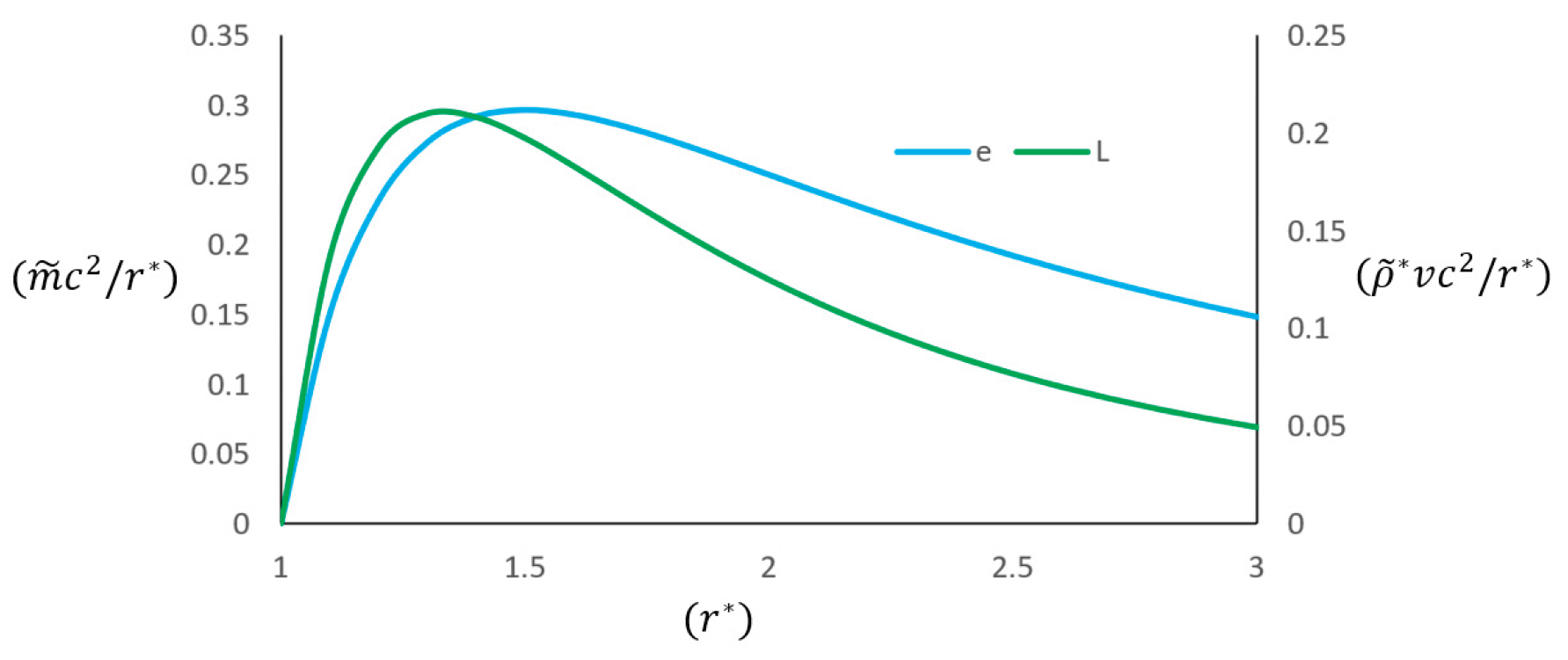

Table 1.
Base components, their derivatives and gravity at experimental positions.
 |
Table 2.
Terrestrial freefalling experiments from position 6371.493 to 6371.393.
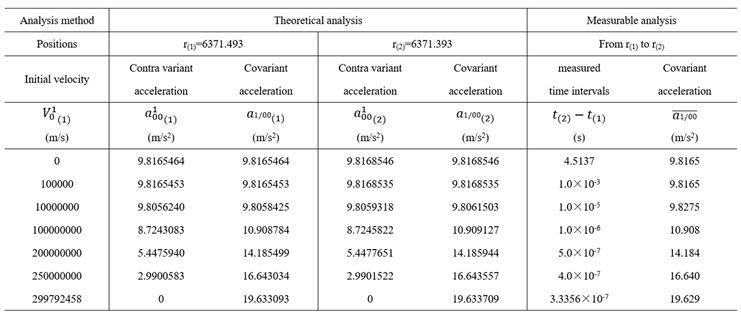 |
Table 3.
Terrestrial freefalling experiments from position 6372.393 to 6371.393.
 |
Table 4.
Energy for matters to escape from within event horizon
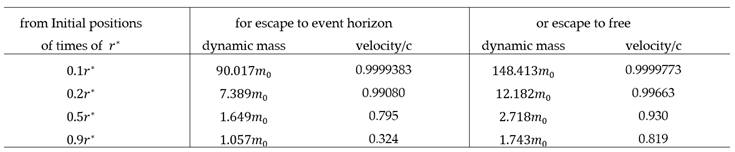 |
Table 5.
Comparison of the analytical solutions, difference method solutions and the ballistic trajectory method solutions.
Table 5.
Comparison of the analytical solutions, difference method solutions and the ballistic trajectory method solutions.
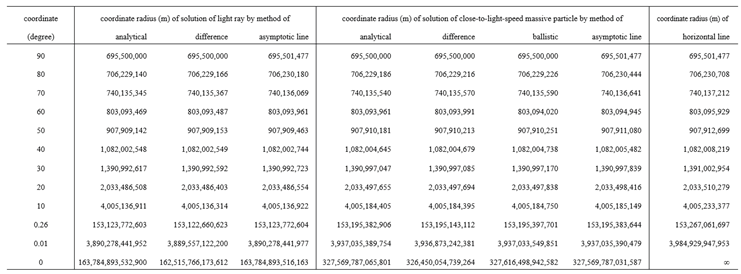 |
Table 6.
Relativistic and detectable frequency shifts at different positions.
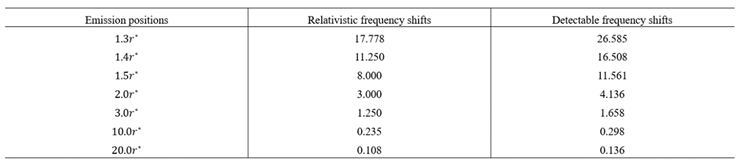 |
Table 7.
Emission line widths at different positions with specific exciting widths.
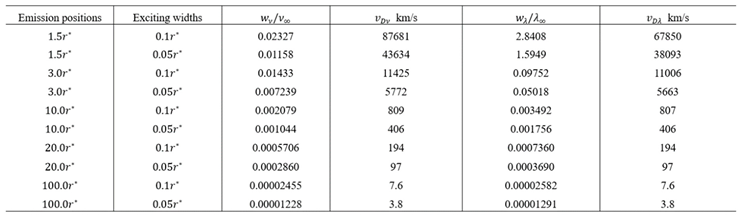 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



