Submitted:
03 March 2025
Posted:
05 March 2025
You are already at the latest version
Abstract
The Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithm offers a robust solution for the coverage path planning problem, where a robot must effectively and efficiently cover a designated area, ensuring minimal redundancy and maximum coverage. Traditional methods for path planning often lack the adaptability required for dynamic and unstructured environments. In contrast, TD3 utilizes twin Q-networks to reduce overestimation bias, delayed policy updates for increased stability, and target policy smoothing to maintain smooth transitions in the robot's path. These features allow the robot to learn an optimal path strategy in real-time, effectively balancing exploration and exploitation. This paper explores the application of TD3 to coverage path planning, demonstrating that it enables a robot to adaptively and efficiently navigate complex coverage tasks, showing significant advantages over conventional methods in terms of coverage rate, total length, and adaptability.
Keywords:
I. Introduction
II. Methodology
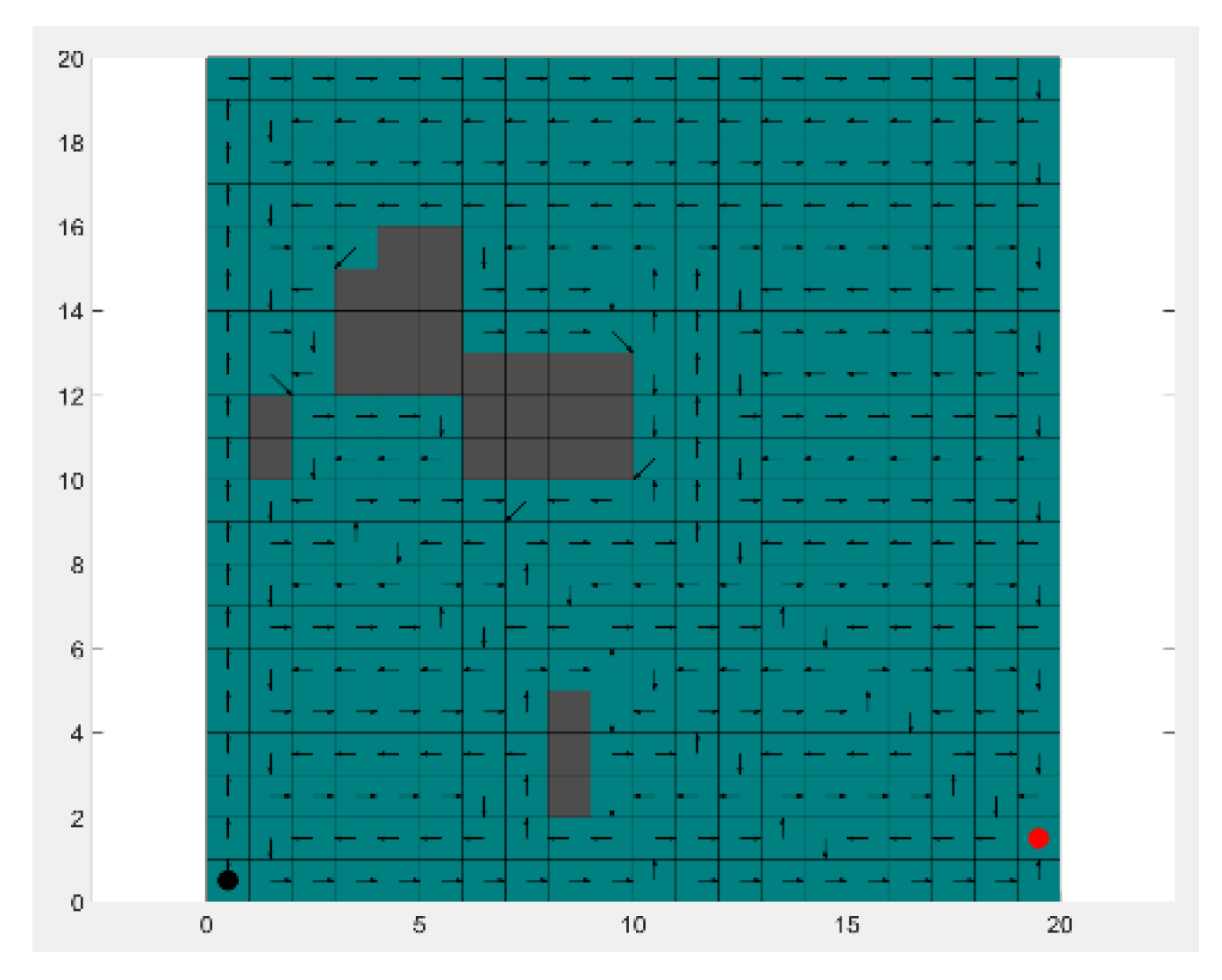
A. Problem Description
B. Twin Delayed Deep Deterministic Policy Gradient
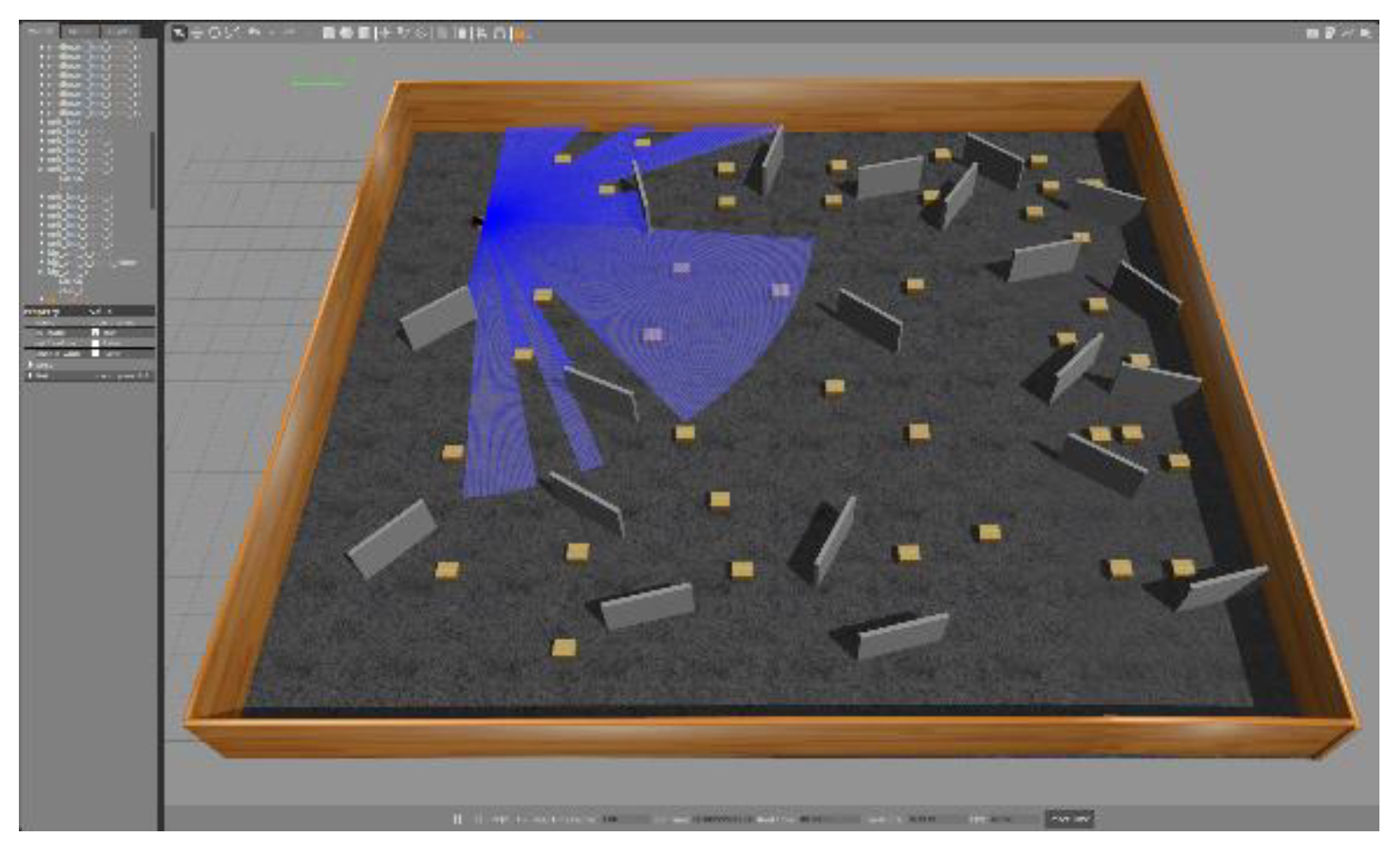
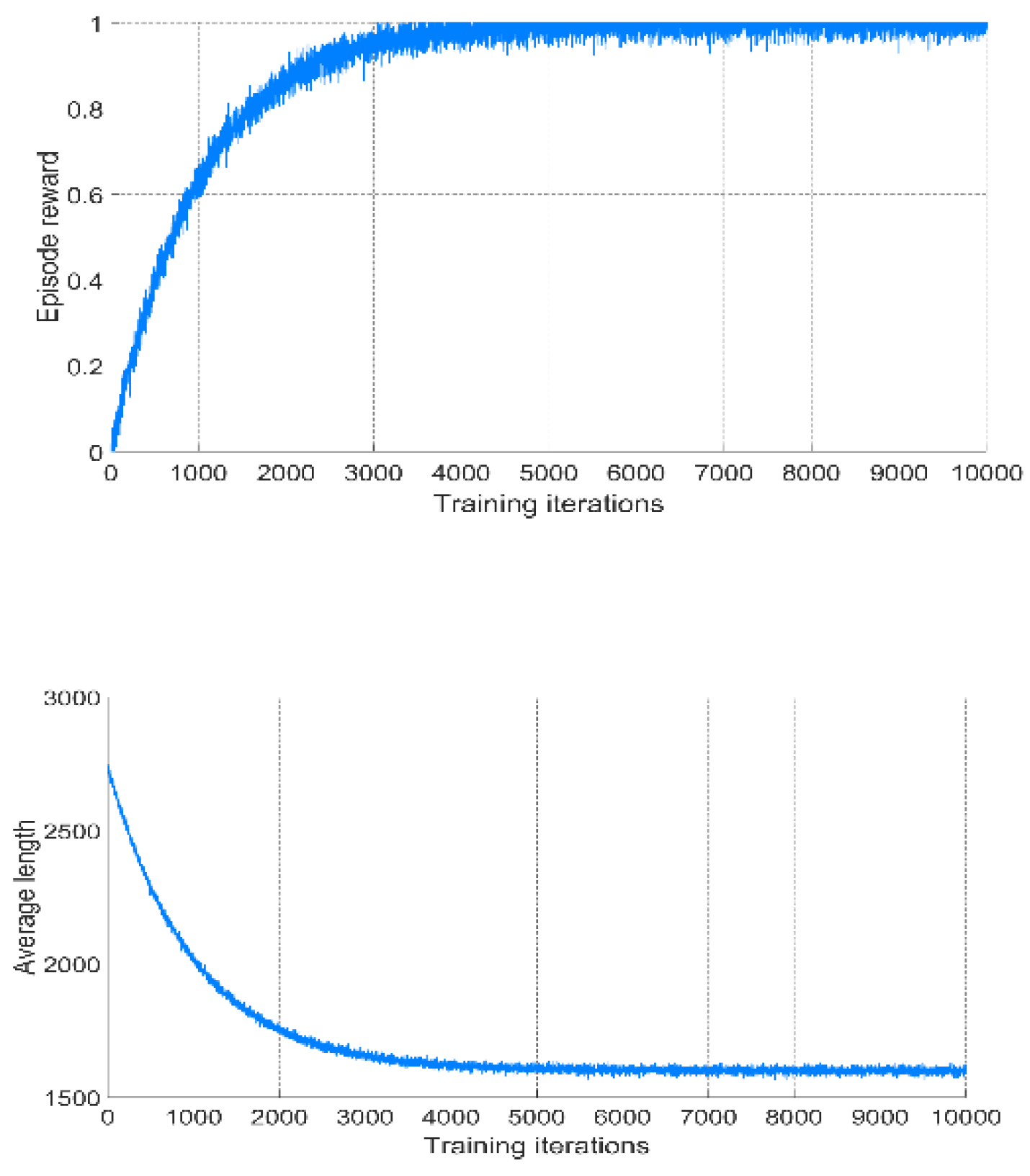
III. Experiments
IV. Conclusions
References
- Dang, B., Zhao, W., Li, Y., Ma, D., Yu, Q., & Zhu, E. Y. (2024). Real-Time Pill Identification for the Visually Impaired Using Deep Learning. 2024 6th International Conference on Communications, Information System and Computer Engineering (CISCE), 552–555. [CrossRef]
- Ma, D., Yang, Y., Tian, Q., Dang, B., Qi, Z., & Xiang, A. (08 2024). Comparative analysis of X-ray image classification of pneumonia based on deep learning algorithm algorithm. [CrossRef]
- Liu R, Xu X, Shen Y, et al. Enhanced detection classification via clustering svm for various robot collaboration task[J]. arXiv preprint arXiv:2405.03026, 2024. [CrossRef]
- H. Liu, Y. Shen, C. Zhou, Y. Zou, Z. Gao and Q. Wang, "TD3 Based Collision Free Motion Planning for Robot Navigation," 2024 6th International Conference on Communications, Information System and Computer Engineering (CISCE), Guangzhou, China, 2024, pp. 247-250. [CrossRef]
- Tao C, Fan X, Yang Y. Harnessing llms for api interactions: A framework for classification and synthetic data generation[J]. arXiv preprint arXiv:2409.11703, 2024. [CrossRef]
- Yin J, Zheng Z, Pan Y, et al. Semi-supervised semantic segmentation with multi-reliability and multi-level feature augmentation[J]. Expert Systems with Applications, 2023, 233: 120973. [CrossRef]
- Dan H C, Lu B, Li M. Evaluation of asphalt pavement texture using multiview stereo reconstruction based on deep learning[J]. Construction and Building Materials, 2024, 412: 134837. [CrossRef]
- Tan L, Liu S, Gao J, et al. Enhanced self-checkout system for retail based on improved YOLOv10[J]. Journal of Imaging, 2024, 10(10): 248. [CrossRef]
- Fan X, Tao C. Towards resilient and efficient llms: A comparative study of efficiency, performance, and adversarial robustness[J]. arXiv preprint arXiv:2408.04585, 2024. [CrossRef]
- Zhang Y, Zhu M, Gui K, et al. Development and application of a monte carlo tree search algorithm for simulating da vinci code game strategies[J]. arXiv preprint arXiv:2403.10720, 2024. [CrossRef]
- Y. Shen, H. Liu, C. Zhou, W. Wang, Z. Gao and Q. Wang, "Deep Learning Powered Estimate of The Extrinsic Parameters on Unmanned Surface Vehicles," 2024 9th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Dalian, China, 2024, pp. 6-10. [CrossRef]
- Fan X, Tao C. Towards resilient and efficient llms: A comparative study of efficiency, performance, and adversarial robustness[J]. arXiv preprint arXiv:2408.04585, 2024. [CrossRef]
- Yin J, Peng N, Chen Y, et al. Class-level multiple distributions representation are necessary for semantic segmentation[C]//International Conference on Database Systems for Advanced Applications. Singapore: Springer Nature Singapore, 2024: 340-351.
- Tao C, Fan X, Yang Y. Harnessing llms for api interactions: A framework for classification and synthetic data generation[J]. arXiv preprint arXiv:2409.11703, 2024. [CrossRef]
- Liu X, Wang Z. Deep learning in medical image classification from mri-based brain tumor images[J]. arXiv preprint arXiv:2408.00636, 2024. [CrossRef]
- Ru J, Yu H, Liu H, et al. A bounded near-bottom cruise trajectory planning algorithm for underwater vehicles[J]. Journal of Marine Science and Engineering, 2022, 11(1): 7. [CrossRef]
- Peng X, Xu Q, Feng Z, et al. Automatic News Generation and Fact-Checking System Based on Language Processing[J]. arXiv preprint arXiv:2405.10492, 2024. [CrossRef]
- Wang C, Sui M, Sun D, et al. Theoretical analysis of meta reinforcement learning: Generalization bounds and convergence guarantees[C]// Proceedings of the International Conference on Modeling, Natural Language Processing and Machine Learning. 2024: 153-159.

| Approach | Total Length(m) | Running Time(s) | Coverage rate(%) |
| Spiral | 2076 | 0.12 | 100 |
| ACO | 2434 | 3.78 | 98.3 |
| Greedy Search | 1875 | 42.37 | 100 |
| GA | 1948 | 4.61 | 97.8 |
| DDPG | 1864 | 0.75 | 100 |
| TD3 | 1652 | 0.64 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



