
Submitted:
19 December 2024
Posted:
23 December 2024
You are already at the latest version
Abstract
We present and develop Local Prospect Theory (LPT) as a novel framework for understanding consciousness, and in particular subjective experience and free will. While Predictive Processing (PP) theories model the brain as minimizing uncertainty, LPT sees uncertainty as an essential feature of conscious decision making. This is achieved by creating a "local prospect"—a range of potential developments that allows an agent to consider and choose based on probabilities and subjective values rather than precise predictions. Drawing on Global Workspace Theory, LPT conceptualizes consciousness as a self-maintaining process of circulating neural activation, creating a temporary working memory where thoughts and feelings coming from different brain modules enter into an asynchronous, non-linear interaction. This contrasts with unconscious, feedforward processes, which operate automatically and deterministically. LPT proposes entropy-based measures, including determination of actions by conditions and breadth of prospect, to quantify the range of potential developments considered. This framework allows us to understand Buddhist practices like mindfulness and meditation, which broaden consciousness and deautomatize reactions by reducing the influence of conditioning. The proposed prospect measure may be operationalized by indicators such as variety of action, breadth of perception and behavioral unpredictability, thus allowing empirical testing of the theory.
Keywords:
consciousness
; predictive processing
; global workspace
; entropy measures
; uncertainty
1. Introduction
“Between stimulus and response there is a space. In that space is our power to choose our response. In our response lies our growth and our freedom.” (quote attributed to Viktor Frankl)
We have recently proposed a new approach for tackling the notorious “hard problem of consciousness” [1,2]. This problem consists in trying to understand the nature and function of subjective experience, which is also known as phenomenal consciousness or qualia. Our approach, which we have named the Local Prospect Theory (LPT) [3,4], is inspired in part by existing neural models of consciousness, in particular the Global (Neuronal) Workspace [5,6] and the Adaptive Resonance Theory [7,8], and by Buddhist ideas about freedom from conditioning [9].
Over the past two decades, another fundamental theory of cognitive processing in the brain has been elaborated in extensive detail: Predictive Processing (PP) [10,11,12,13]. PP has made a deep impact on a wide range of domains—from neurophysiology over psychology to AI and philosophy—by clarifying the mutual dependence between bottom-up information processing (perception) and top-down interpretation and inference (prediction). While PP is not a theory of consciousness as such, several authors have suggested that it may help us to solve the hard problem of consciousness [14,15,16].
Like PP, our novel Local Prospect Theory recognizes the fundamental role of the brain in predicting or anticipating perceptions, conceptions, and actions. However, there is a fundamental difference between LPT and PP, which for us defines the essence of consciousness. Predictive processing, like other mathematical models inspired by physics, describes the functioning of the brain as an optimization process: the brain is trying to make the best possible prediction. That means that its processes strive to minimize uncertainty—as formalized by the information theoretic measures of surprisal or free energy [17]. In our LPT analysis, on the other hand, consciousness implies a free choice from a range of options, implying uncertainty about what comes next. From this perspective, an optimization model like PP, which selects one right solution (interpretation or action), may be a good model of unconscious processing. However, it lacks the aspect of consideration, deliberation, or “free will” that is characteristic of conscious decision making and our ability to go beyond conditioning. This freedom entails a range of possibilities from which a choice is to be made. That range is what we call a local prospect. It can be modelled as a probability wave with a non-zero entropy.
In the following, we will summarize the Local Prospect Theory and review its similarities and differences with PP and its associated “active inference” framework. We will discuss several examples to demonstrate how LPT answers the hard problem of consciousness and the question of free will, in a manner that PP and related theories fail to do. We will further argue that LPT explains and corroborates a number of observations and techniques to control consciousness that were developed in Buddhism. We will finally suggest methods to operationalize LPT, in particular by developing mathematical and empirical measures for the “breadth of awareness” that LPT assumes.
2. Sense-Making in LPT and PP
In LPT, the most fundamental function of cognition, and therefore of the brain, is to make sense of the situation as experienced by an individual agent [18,19,20]. Sense making means understanding what is going on, anticipating what may happen, and thus being prepared to intelligently choose actions appropriate for the situation. That is necessary because an agent, as a biological organism that has evolved to be good at survival, must be able to deal with any challenges it is likely to encounter. These include problems to be solved or dangers to be evaded as well as opportunities to be exploited.
Making sense of a situation and tackling the challenges inherent in that situation is a process that can be decomposed into the following aspects or components:
- Perception: acquiring relevant information about the situation by means of the sensory organs, such as eyes and ears
- Identification: recognizing specific categories of phenomena (e.g. a cat, a table, or a lightning) with known properties in these perceptual data
- Explanation: inferring a reason, origin or cause for the situation that was perceived, thus getting to understand why these phenomena are present
- Prediction: using the knowledge about the nature, properties and origin of the identified phenomena in order to anticipate what may happen next
- Intention: evaluating the different perceived, conceived and anticipated phenomena as better or worse, thus mapping out desirable outcomes (goals, intentions) as well as undesirable ones (dangers, problems)
- Action: selecting and performing actions likely to achieve the intentions and to evade the dangers, thus improving the situation for the individual insofar possible.
These six components characterize the interaction between an intelligent, goal-directed agent and its environment. They were inspired both by a cybernetic analysis of goal-directed action [21,22], and by the concept of a worldview as a broad scheme for making sense of the world in which one lives [23,24].
The “active inference” interpretation of predictive processing (PP), which also drew inspiration from cybernetics [25], assumes roughly equivalent functions of brain activity, albeit from a different perspective. The standard PP account sees the basic functions of the brain as not only prediction (component 4), but as inferring the likely identity, source or origin of perceptions (components 1, 2, 3), by using Bayesian reasoning to calculate the probabilities of different phenomena causing the perception, and then inferring the explanation with the highest probability. This explanation is used to predict further perceptions which are then compared with the perceptual data as they come in. When perception and prediction do not match, an error signal is generated that will trigger an inference process to find an explanation that produces a more accurate prediction. In this way, the brain seeks to maximize the accuracy of its predictions, while minimizing surprises (perceptions that were not predicted).
The active inference extension to PP rather counterintuitively postulates that intentions (component 5) and actions (component 6) are also predictions [26,27,28]. For example, when an organism is hungry, the extended PP account does not state that the organism has the desire or intention to eat, but that its brain predicts that it will eat. As long as there is no food, this prediction is in error, and therefore the brain will try to infer a better “explanation”. This is a so-called active inference, i.e. an inference that takes the form of an action in the real world, where that action is supposed to eliminate the error, by actually obtaining the food that the brain has “predicted” would be eaten. Thus, in the extended PP account actions are merely externalized versions of the predictive inference processes inside the brain.
To us, this seems like an unnecessarily contrived formulation of goal-directed action, with the only function of reducing everything to predictions. We agree that there is a prediction aspect to action, in the sense that the brain plans or expects that the selected action will bring the situation closer to the desired goal. However, the goal itself is not predicted, but chosen among an extremely wide range of possible developments that are more or less desirable according to the organism’s value system. As a philosopher noted, the railway timetable allows you to predict which train will reach which city at which time. However, it does not tell you which city you want to travel to: that depends on your personal preferences or values [29]. PP tries to circumvent this problem by postulating that our instinctive values (such as avoiding hunger) function as predictions that are hardwired into our brain because the organism has been selected for survival. However, there is such a great uncertainty about how these hardwired preferences would be realized—if ever—that calling them “predictions” seems more like an abuse of language than like a clarification of the underlying mechanism.
Making abstraction of the terminology used, the active inference account and the local prospect theory agree that the 6 components listed above are essential aspects of the way the brain makes sense of a situation. The difference is that LPT sees the elementary processing steps underlying each component not as predictions, but rather as what is known in AI as condition-action rules [30,31]. These have the form: if condition X holds, then perform action Y. The short notation is: condition → action or X → Y. Predictions can then be seen as a special case of condition-action rules, with the action consisting in inferring an additional condition that is predicted to follow X. Such a rule could be noted as: condition1 → condition2. This predicted condition2 can then function as input for another condition-action or condition-condition rule.
From a cybernetic perspective, an agent can only achieve its goal of survival by effectively acting in the world so as to reduce the deviation between its present condition and its preferred condition or goal. Prediction is then merely a more recently evolved mechanism supporting the selection of adequate actions. It takes the form of an internalized action (inference) that helps the organism to anticipate and plan developments in the outside world [20]. Goals are then implicit attractors of the dynamics of condition-action rules, i.e. final conditions to which a sequence of actions tends to converge [22]. From now on, we will therefore consider mental processes initiated by the agent (such as inferences, predictions, or thoughts) together with its physical activities as all being actions.
3. Prospect vs. Prediction
This difference between LPT and PP—where LPT sees inferences as internalized actions, while PP sees actions as externalized inferences—is still mostly one of perspective, interpretation, or formulation. The more fundamental difference is the role of uncertainty, which leads us to define the notion of prospect. The difference between prediction and prospect is that a prediction singles out a particular development as the one that will occur. In our theory, we define a prospect as a range of developments that may occur. Some of those are more probable or desirable than others, but none is certain. The word “prospect” in English has two common meanings: 1) the envisaged possibility, likelihood or chance of some future development; 2) an outlook across a landscape. Both are special cases of our more general notion of prospect. The landscape interpretation will help us to explain the role of uncertainty and suggest a way to build a mathematical model of prospect.
The prospect over the landscape in front of you is what guides you in deciding where to go, i.e. which path to follow, which landmark to choose as your next destination, and which obstacles or difficult terrain to avoid. Hiking across a landscape is a fundamental example of the way an agent interacts with its environment, continuously deciding what to do next based on its understanding of the perceived situation. That understanding or prospect includes immediate obstacles and affordances, such as the muddy puddle right in front of you and its relatively dry sides left and right that you could step on. It also includes more remote potential destinations, such as the mountain hut in the east or the wood on the south that you see far way. While trekking through an open terrain, you constantly must make both immediate and more long-term decisions about where to go next, depending on the conditions as you perceive, understand, and predict them.
The resulting course of action, navigating efficiently across a landscape of opportunities and dangers, is common to all goal-directed agents [32]. We even find it in the directed movement of bacteria known as chemotaxis, during which the bacterium samples the local concentration of chemicals such as food and poisons, and uses that perception to steer towards the food and away from the poison [22,33]. Our concept of prospect extends and generalizes this idea from concrete, physical landscapes to abstract, conceptual landscapes of potential developments. In mathematical terms, this means that we generalize from ordinary, three-dimensional space to a multidimensional state space defined by agent-relevant variables, and from a geological landscape of hills and valleys to a fitness landscape, where desirable destinations are characterized by high fitness and obstacles or dangers by low fitness.
Nevertheless, a fitness landscape is not yet sufficient to capture our notion of prospect. Traditional models of search on a fitness landscape assume that the agent has only a local knowledge of the fitness of a state: it can only evaluate the immediately neighboring states, lacking any knowledge of the path that leads to the global maximum of the fitness function. In an actual landscape, you typically also cannot see the optimal path that leads to the most desirable destination, because there are too many obstructions and the fuzziness of distance that hinder your view. However, you generally can see farther than the immediate neighborhood, although the accuracy of your prospect decreases with the distance.
That means that the prospect is uncertain: you have limited information to guide you in your decisions. But while you go forward you acquire additional information as places behind obstacles become visible or vague impressions are resolved into sharper detail. At the same time, the places you left behind disappear from your field of vision. Thus, your movement through the landscape is accompanied by a continuously changing prospect, where some things come temporarily into sharp focus while others remain or become to different degrees vague and uncertain [32].
The same shifting prospect accompanies cognitive processes in general. The task of the agent is to choose a good path through this patchily visible landscape of possibilities, which are to various degrees predictable or uncertain. The simplest strategy is local optimization: ignore all the faraway, uncertain prospects, and consider only the immediately available next steps. From these, choose the apparently best one. If it turns out to be a bad choice, the resulting error signal tells you to try the next best option. If this is still not satisfactory, choose the next one, and so on. This is the strategy followed by bacteria, who anyway can only sense the local concentration of chemicals. It is also the strategy assumed in PP models of cognition. These models function well in describing automatic processes of perception, understanding, and prediction in the brain. However, this is not the strategy followed in deliberate, conscious reflection. To explain this, we need to investigate the difference between conscious and unconscious activities.
4. Conscious vs. Unconscious Processes
The great majority of cognitive processes in the brain happen outside of consciousness. We may be conscious of the result, but we are typically not conscious of how that result was achieved. For example, identifying an animal, such as a cat, is something we do automatically without having any notion of the complex stages of processing that lead from the scattered light stimuli on the retina to the conclusion that this is a cat. It is only recently that complex AI programs based on deep learning neural networks have been able to replicate that seemingly trivial feat [34,35]. Another example of an apparently easy activity is walking on two legs while keeping in balance. Again, it has taken AI researchers decades to develop software that could make a robot walk the way a human does, albeit still clumsily [36]. A last example of a complex cognitive process that we perform automatically and nearly effortlessly is understanding the words of a sentence spoken against a noisy background—something AI programs still struggle with.
The PP approach with its models of Bayesian inference clarifies how the brain selects the most likely interpretation of such initially ambiguous visual or auditory stimuli. Its active inference extension helps us to understand how the brain guides the movement of the muscles in our legs and rump in order to plan and execute the next step while walking. What characterizes these kinds of processes is that the brain needs to select the one correct solution. The animal you saw is either a cat or it is not. The step you take either makes you move forward, or it makes you stumble. If the solution inferred turns out be wrong, the PP error-correcting mechanism will automatically select the next best one.
Conscious decision-making functions in a different way. Let us go back to the landscape example, and assume that you are hiking across an irregular, natural terrain, such as a forest. You have no specific destination but are just exploring and enjoying the sights and sounds around you. You have a local prospect that includes both free spaces where you can walk and obstacles, such as tree trunks, brambles or muddy puddles. If you are not careful, you may fall in the mud or get stuck in the brambles. In these circumstances, you will typically be very conscious of every step you take, carefully monitoring the movement of your legs, while looking ahead and considering alternative routes in order to plan your next steps. This is not just conscious reasoning or deliberation: you moreover feel the balance of your body with respect to the puddle or how the mud shifts under your foot. This conscious feeling, which includes visual impressions, physical sensations, emotional reactions, and thoughts about the situation, is what is called subjective experience.
Imagine now that you are walking along an empty street while having an animated conversation with a friend. This movement happens automatically, following in the footsteps of your friend, without any hesitation or deliberation. However, you still need to repeatedly lift up one leg while putting down the other in the exact spot that allows you to move forward at the right pace without losing your balance. Yet, you are unlikely to feel when and how your foot touches the ground. Your subjective experience will be focused on the conversation, while ignoring the sensations of moving your legs, or the decisions to be made of where to put your foot down next. Here, the process of walking is nearly wholly unconscious. By the time you reach your friend’s house, you may not even remember where you passed or how long you have been walking.
PP theorists are likely to explain the difference between the two situations by noting that walking on irregular, muddy ground is intrinsically less predictable. Therefore, the brain must invest more energy in exploring alternatives so as to be ready with a better alternative when the initial “active inference” produces a wrong result (e.g. your foot slipping towards the puddle instead of providing a stable support). Thus, PP tends to explain consciousness as the result of low precision in the brain’s ability to predict [15,37].
Nevertheless, you may also walk consciously in situations that can be predicted with high precision, for example across the smooth, rectangular floor of the exhibition hall of a museum. Here you amble slowly, being mindful of the sensations you feel in your body and the sights that surround you, while deciding to advance first towards this exhibit, then towards this other one. What characterizes such a conscious activity is that you are deliberately choosing what to do or what to focus on next. This is the aspect of consciousness that is commonly understood as free will [2,38].
While free will is often dismissed as a metaphysical concept that escapes scientific investigation, there is a very concrete, pragmatic difference between actions that you freely choose to perform and actions that you perform automatically or involuntarily, outside your will. Imagine that one of the exhibits is a precious vase on a stand. You are aware that if you would come closer and push the vase from its stand, it would fall and break into pieces. While you are not planning to do this, pushing the vase is part of your prospect of potential developments: you can imagine perfectly well how it would fall if you bumped into it, so you try to move very carefully while examining it.
Suppose now that—after all—you decide to give it a push. Perhaps you want to make a statement against the owner of the vase, or perhaps you are just curious to see how it would shatter into thousands of fragments. Assuming your act of vandalism has been witnessed, you most likely will be brought to court. There, the judge will hold you responsible for the damage you produced and give you a deserved punishment. That is because the judge will rightly assume that you performed this act out of your own free will—i.e. consciously, deliberately, or voluntarily. This assumption of conscious choice is crucial when judging about guilt or responsibility for some action [38].
Now imagine a similar scenario where free will is not involved. Suppose that a wasp has gotten into the sleeve of your coat without you noticing it. While you are standing close to the vase, the wasp stings you in the armpit. The sudden pain makes you violently jerk your arm forward, pushing and thus breaking the vase. This movement is an involuntary reflex, which you could not consciously control. A witness of this event would rightly conclude that the breakage was not deliberate, and therefore that you do not deserve to be punished. Being stung by a wasp was not part of your prospect, so you could not consider different possible reactions. On the other hand, a sudden sharp pain is a condition that your brain instinctively recognizes as a trigger for immediately pulling away from the source of the pain. This is an automatic reaction, leaving no choice in how or whether it is executed.
These two scenarios make clear that there is a fundamental difference between free or conscious decisions, and automatic or unconscious ones. With the conscious ones, your brain somehow maintains a prospect, i.e. a range of conceivable developments to consider. That allows it to choose one option among several. With the unconscious ones, your brain immediately produces a specific response, ignoring any other possibilities. That is because its predictions follow a rigid neural structure, resulting from instinct or conditioning. Let us try to understand the origin of that difference by investigating the neural processes involved in making such decisions.
5. Consciousness as a Circulating Neural Process
In our paper introducing LPT [4], we explained the neural mechanisms that could implement conscious deliberation and experience in the brain. Let us here summarize the core ideas. Inspired by the Global (Neuronal) Workspace Theory [6,39] and Adaptive Resonance Theory [7], we see consciousness as a process of recurrent or circulating neural activation. The cyclical nature of this process allows it to achieve a state of self-reinforcing resonance [40], where the neurons participating in the activation pattern continuously pass activation back and forth, thus maintaining a coherent, synchronized, or integrated activity.
Without this amplifying feedback loop connecting different parts of the pattern, activation would just advance in a straight sequence across successive layers of neurons, ending in a particular “conclusion” or “decision”—e.g. to perform a particular action or to identify a particular perception as a cat. Such a feedforward process is quick and efficient, but unconscious [41,42]. The reason is that no activation is left to keep track of the intermediate processing stages, so that they cannot be monitored or redirected by other parts of the brain. That is why you have no idea how your brain came to the conclusion that what you saw is a cat. It also explains why your awareness of the fragility of the vase could not stop your arm from jerking towards the vase when stung by the wasp.
The circulating activation of a resonance, on the other hand, is what maintains the information being processed in working memory, so that other parts (“modules”) of the brain have the time to work with it. That means that the content of your consciousness is not just a snapshot of your sensations at this precise instant: it covers a “thick moment” or “extended present”, i.e. a finite temporal interval that includes sensations felt earlier or anticipated to happen shortly [2,43]. The network of neurons in which this activation circulates has been conceived as the global workspace of the brain. It functions as a forum though which different, more specialized neural circuits or modules, localized in different parts of the brain, can share information [5,6,39].
Since LPT conceives of consciousness as a process [4], not as a material component or substance, it does not depend on where in the brain this “workspace” would be situated. It seems plausible that the resonance would be distributed, having neither a delimited location nor a precise time. It may even extend outside the brain, if we consider the on-going feedback loop between action and perception of the action’s result as part of the circulating process that maintains a coherent activity [44,45,46]. For example, for blind people sensing their surroundings with a cane, the controlled movements and perceived feedback from the cane’s tip are so tightly integrated with the brain’s prospect that the person’s sensations appear to extend into that tip [47].
In that respect, LPT is compatible with the Information Integration Theory (IIT) of consciousness, which sees a system (neural or other) as conscious if its processes are sufficiently coherent or integrated, so that they cannot be subdivided in independently acting parts [48,49]. However, LPT is more concrete than IIT in specifying the adaptive, goal-directed functions (as summarized by the 6 components of prospect) that this coherent process serves. Therefore, LPT—unlike IIT—would not attribute consciousness to a complex, highly integrated circuit of transistors or other inorganic components that lacks goal-directedness or agency.
Our proposed theory is also compatible with Dennett’s view of consciousness as fame in the brain [50,51]. Both views suggest that neural processes become conscious when they achieve some form of prominence that makes them broadly noticeable throughout the brain. This visibility or “fame” is achieved through amplification of the pattern of neural activation, temporary maintenance in working memory, and broadcasting to other parts of the brain, thus winning the competition for attention with activation that remains weaker and local.
In conclusion, we see consciousness as an emergent, self-maintaining process [52], with no fixed location, fixed moment in time, or fixed substrate, which however can to some degree retain a continuous identity while undergoing constant change. Physical analogs of such a process can be found in dissipative structures [53,54], such as convection cells, tornados, or hurricanes, which consist of a circulating flow of ever-changing material. While moving across a landscape, a tornado can pick up objects, keep them suspended in the air for a while, and then drop them somewhere else. Similarly, the circulating activation that constitutes consciousness can pick up information coming from perception, long-term memory, or thought, keep it in working memory for a while, and then drop it again, in order to make room for new information. Such a relatively persistent but adaptive process can perhaps be modeled by means of self-maintaining reaction networks known as chemical organizations [55,56].
6. Subjective Experience
Global workspace or “fame in the brain” theories provide plausible models for what is called access consciousness [2,57]. That means that information held in consciousness (workspace) can be accessed by other parts of the brain, so that it can be examined, monitored, and reported on (e.g. by speaking about it). However, the supposedly “hard” problem consists in explaining the nature and function of phenomenal consciousness, or what we called subjective experience. This refers to the feelings that accompany a conscious thought or perception.
LPT extends global workspace theory by considering a halo of weaker, diffuse activation emanating from the core of circulating activation [3,4]. This halo is not itself part of the resonance, but some of it may feed back into this circulating flow, thus guiding its further evolution. (In the tornado analogy, the equivalent of the halo would be the surrounding regions of high and low pressure that direct the winds in and out of the tornado itself.) This halo can now implement the local prospect associated with the percepts or concepts held in access consciousness/global workspace. It provides a prospect in the sense that it “illuminates” or pre-activates a space of more or less probable next developments of the core resonance (see Figure 1). The activation spreading out of the resonance is weaker than the self-reinforcing activation circulating within the resonance. Nevertheless, it primes or facilitates the extension of the resonance to these already partially activated regions. Thus, the contents of the halo constitute a kind of fringe between conscious and unconscious [58,59]: outside the focus of attention, but still affecting the evolution of this focus.
The shape and extent of this halo depends on the mechanism of spreading activation [60]: the stronger the associations between a region inside the resonance and one outside the resonance, the more activation the latter region will receive. Thus, percepts or concepts that are strongly associated with what is presently in the resonance are more likely to become part of the resonance in the next step. The strength of these associations depends on the amount of reinforcement they have received while the agent was learning from its environment. The content of the associations can be understood through the six aspects of prospect mentioned earlier: the brain will pay particular attention to associated perceptions, identifications (concepts or categories), explanations, predictions, intentions (goals), and actions (affordances).
The feelings that constitute subjective experience will in particular include the subjective value (positive or negative) or valence of potential developments [61] associated with the concepts presently held in mind. Thus, the halo is not an objective analysis of the content of consciousness, but a subjective evaluation of the aspects relevant to the individual undergoing the experience. It situates this content in a semantic field of relations, expectations, and values, which forms a subjective context. That gives the content meaning, while creating a prospect of likely or desirable future developments. These function like forces, pushing and pulling the focus of thought in different directions, typically towards desirable or important options and away from undesirable or indifferent ones. That is why subjective experience is affective: it consists of feelings that affect the mental process, creating a complex dynamic whose result is difficult to predict.
This complex dependency between the thoughts held in working memory (global workspace) and the halo of “forces” mapping out a prospect of potential further thoughts or actions provides an answer to a classic philosophical question: why are our thoughts and perceptions accompanied by feelings? Why do we not just automatically process the information received in order to determine the correct reaction and then execute that action? The latter is what a mechanical system, such as a computer or a robot would do. It is probably also how a simple organism without consciousness, such as a bacterium or an insect, functions.
The difference can be illustrated by an event one of us witnessed. A colleague tried to get rid of an annoying wasp by capturing it under an upside-down glass. However, the glass came down on the wasp’s narrow waist in such a way as to cut off the rear half of its body. To our surprise, this did not kill or even immobilize the wasp: the front half, including the head and first pair of legs, for several minutes continued crawling around and trying to fly off as if nothing had happened. A plausible interpretation is that the wasp’s genetically programmed condition-action rules had not prepared it for a condition in which it lost half of its body. Therefore, its automatic reflexes controlling the movement of the front legs and wings continued executing the same actions as before.
It is clear that the pain felt by a human in a comparable situation of, say, losing one’s legs, would be such that continuing ordinary actions would be the last thing on that person’s mind. According to LPT, that is because pain or other feelings function to shape the prospect of potential developments so as to make certain developments more probable or desirable, and others less so. Imagine that most of your body got covered under falling rock. The pain would tell you which parts of your body are most severely hurt or most under pressure, and which ones you might still be able to move so as to possibly free yourself from under the rock without causing further damage. Freeing yourself from under a heap of rock is an activity that requires full consciousness: the risks of getting stuck or getting irreparably hurt are too great to rely on any automatic reflexes; you need to carefully sense and map out the landscape of possible movements and their likely consequences before deciding which limbs to move in what way.
This example illustrates the crucial role of feeling in shaping the local prospect. This applies not only to intense feelings such as pain but to a great variety of subjective experiences and impressions, such as warmth, touch, taste, shape and sound, which together color the landscape of potential developments as it appears before consciousness—i.e. the circulating process in the global workspace. That helps consciousness to make a wise, considered choice out of the prospected options, instead of immediately executing an automatic condition-action rule or stimulus-response procedure—the way a wasp would do. If there were just a single, easily computable, optimal response to a given condition—the way PP and many cognitive models assume—then there would be no need for feeling to finely appreciate, discriminate, and evaluate the different options for thought or action. Feeling only makes sense in the “extended moment”, the time interval between stimulus and response during which the circulating process can explore a range of potential reactions.
7. Decision-Making in the Workspace
We still need to explain how a particular thought, interpretation or action is eventually selected from within the broad prospect. The Global Workspace Theory of consciousness is inspired by what in AI is known as a blackboard architecture [62] and the associated notion of the society of mind [63]. The idea is that the intelligence of the mind is really the collective intelligence emerging from the collaboration between an assembly of simple modules, each of which is specialized in a particular type of task. While these modules are individually very limited in their capabilities, together they can solve complex problems, by each taking on the subproblems that they are most skilled in.
The modules communicate by using a shared “blackboard”, “message board” [30], or workspace, in which they post their provisional conclusions. These incomplete results are then picked up by further modules accessing the workspace and adding their own contribution to develop the result a little further. By thus building on each other’s results, the “society” of modules can tackle complex problems with many aspects. This mechanism is similar to the coordination via stigmergy that social insects, such as ants and termites, use to make collective decisions and to develop complex structures, such as a termite hill or a network of pheromone trails leading to food [64,65].
While activity performed by independent agents can be efficiently coordinated by having those agents work on a shared medium—such as a blackboard, pheromone trace, or neuronal workspace—there is an intrinsic indeterminism in how this activity proceeds. In the simplest case, each agent executes a specific condition-action rule: whenever the content of the medium satisfies a condition it recognizes, the agent performs the associated action, thus changing the content of the medium—a change perceivable by the other agents. This changed content will typically be recognized as satisfying conditions that incite one or more agents to perform a subsequent action. In this way, actions build on the outcomes of previous actions.
The problem is that in general the state of the medium will simultaneously satisfy the conditions recognized by different agents. In this case, it is not clear which of the associated actions should be performed first. Depending on the order in which actions are executed, the further development of the medium can follow very different trajectories. Such a process is sensitive to initial conditions [66]: depending on which action producing a new condition is performed first, the subsequent course of action may go in completely different directions. That is because each next action is a reaction to the most recent outcome of the sequence of all preceding actions.
We may assume that the propagation of activation in the brain happens asynchronously: there is no master clock that times at exactly which millisecond each neuron is supposed to fire. Therefore, there is no fixed order in which neural signals arrive in a particular region, such as the one functioning as the global workspace. Even if we would assume that each module, agent, or condition-action rule in the society of mind would react deterministically to the input it receives, their outputs would arrive in the workspace in a variable, indeterminate order. Because of the non-linearity and path-dependence of the overall dynamics, such small variations in timing can produce large variations in the eventual sequence of decisions made in the workspace [67]. That would make the process as a whole unpredictable. (Note that the neural activity that constitutes the core consciousness, i.e. the resonance, is generally assumed to have become synchronized by participating in that resonance [40]. However, that synchronization does not extend to neural inputs originating in the halo, i.e. outside the resonance.)
This indeterminism explains why the path across the prospect that is eventually chosen in the global workspace is inherently uncertain. It also explains why a metaphysical assumption of determinism at the level of local neural processes does not preclude a pragmatic assumption of free will at the level of the global decision. Thus, we might say that the uncertainty of the choice made derives from the distributed character of the overall process: in the brain, there is no central location with a central time where conscious decisions are made [2]. Decisions emerge from a multiplicity of local processes, initiated at different locations and at different times, that interact and combine into the global resonance. This is a highly non-linear process of self-organization, in which initially independent local processes try to achieve a global alignment [52,68]. Depending on the precise strength and timing of these inputs, the resonance may shift into very different directions.
While this intrinsic uncertainty of the outcome is easy to demonstrate with various mathematical or computational models (e.g. Kuznetsov, 2021), it can also be understood via a more intuitive analogy [4]: it is as if the different modules forming the society of mind are holding a conversation in the forum provided by the global workspace. Depending on which one speaks first or reacts first to a previous proposal, the discussion can veer into different directions, coming to very different conclusions [69].
As an aside, it is worth noting that the common assumption that physical processes are deterministic is metaphysical, not scientific. Some scientific theories—such as classical mechanics or general relativity theory—assume that processes are completely determined by their initial conditions. Others—such as quantum mechanics, statistical mechanics or Darwinian evolution—do not make that assumption. Thus, determinism is a property of a particular theory, not of the underlying reality. There is no experiment that could be performed to test whether reality is deterministic: whatever the result of the experiment, determinists will assume that the result was anyway determined before the experiment took place, while indeterminists are free to assume that a different result was in principle possible. There is no way to prove or falsify either assumption. Therefore, the metaphysical assumption of determinism is irrelevant to the practical question whether a decision was made according to a preprogrammed automatism or a result of free will. The only pragmatically relevant question is whether the outcome is predictable or not. We just argued that in the case of decisions made in the global workspace, it is typically unpredictable. Therefore, our theory assumes an essential uncertainty.
8. Towards a Mathematical Model of Prospect
Now that we have established that the path followed by a conscious process is inherently uncertain, we wish to more formally examine how this uncertainty is reflected in the local prospect. We defined a prospect as an incomplete view, centered around the here-and-now of the agent’s understanding of its situation, on a space of potential developments departing from that situation. The situation or state s can be defined as the whole of the conditions that the agent has inferred or perceived to be present at this moment t, albeit that some of these inferences may be uncertain. A development is a sequence of more or less probable future conditions that the agent’s condition-action rules can infer or achieve starting from these present conditions. Each conceivable development corresponds to a path in that space, while each point in the space is a potential destination through which one or more paths may pass.
A prospect could be represented mathematically by an analog of the wave function of quantum mechanics. That wave function would be spread out across the space, having different intensities at different points, with the highest intensity typically concentrated in the here-and-now. In quantum mechanics, the probability density of finding a particle in a particular point is given by the square of the modulus of the (complex-valued) intensity of the wave function at that point. In modeling a prospect, we have no particular reason to work with complex-valued functions. The most straightforward model would be a prospect function p(s, t) whose value simply represents the probability P(s, t) at time t of being in or reaching the point s in the prospect. That would allow us to calculate the overall uncertainty of the prospect using the standard formula for entropy H, for respectively a discrete and a continuous prospect:
Note that while a prospect is inherently uncertain, it is of course so to a limited degree: the prospect represents the expectation that the agent has about likely implications of the situation as it perceives and understands it, excluding unlikely or impossible developments. Thus, a prospect carries information I(t) about the situation. This fits in with the Information Integration Theory of consciousness [48], which sees a quale (content of consciousness at a particular moment) as a cluster of integrated information. The amount of information in a prospect can be defined by another standard formula (where Hmax represents the entropy of a perfectly homogeneous probability distribution):
This is the simplest model of prospect, in terms of a probability density. However, we noted that the space of potential developments can also be conceived as having multiple dimensions, including at least the 6 components discussed earlier. Including these in the model would turn the prospect function into a multidimensional vector p(s), rather than a scalar p(s). Such a prospect would be more similar to a force field than to a wave function or probability distribution. That is why we initially thought of local prospect as a local field [4]. The field lines associated with each point s could be interpreted as trajectories pointing towards the most likely or desirable next states. That would make the field similar to the phase portrait of a dynamic system, with the attractors playing the role of goal states to which the system’s actions make it converge [22]. However, modeling an individual’s cognitive and physical actions as a deterministic dynamic system contradicts the assumption of uncertainty that is the foundation of LPT.
Therefore, it seems more appropriate to stick with a wave function-like model. In the Feynman path integral interpretation of quantum dynamics [70], this even allows considering a variety of more or less probable paths or trajectories passing through a given point, with the classical (least-action) path being more probable than the others, because it suffers least from destructive interference. But interference is an effect of superposing waves with different phases. That is only possible for a scalar wave function p(s) that can take on complex—or at least negative—values. A possible interpretation in terms of brain dynamics is to consider activation that can be either positive (reinforcing) or negative (inhibitory). In that case, waves of positive and negative activation could interfere and neutralize each other in certain regions, producing a complex dynamics. At this early stage of the theory, however, it seems simpler to assume a scalar prospect function that is everywhere non-negative, allowing a straightforward interpretation in terms of probability.
When modeling the 6 components of prospect, probability would be the natural way to measure the prediction component (how likely is the prediction to come true?), but also the related components of perception, identification and explanation (e.g. how likely is the perception, identification or explanation to be correct?). PP assumes that the brain uses Bayesian algorithms to calculate the relevant probabilities. On the other hand, the evaluation and action components, which express the preferences or choices to be made by the agent, are traditionally modeled by a means of a utility function, i.e. a measure of subjective value. A standard decision-making model would then evaluate options according to their expected utility, i.e. utility of the outcome multiplied by the probability that the outcome would be realized. That would require a prospect function with two dimensions, probability and utility, making the calculation of uncertainty unclear.
In standard models of decision making, this is no problem, because the individual is assumed to be optimizing, i.e. choosing the option with the highest expected utility. However, the prospect interpretation of consciousness assumes that making a choice for a certain interpretation or action merely shifts the prospect to a new local situation s. That means that it opens a new range of possibilities locally reachable from that new position, so that uncertainty remains approximately constant. This is similar to the collapse of the wave function in quantum mechanics, where an observation reduces the uncertainty of the variable that was observed (e.g. the position q of a particle), thus “collapsing” the probability distribution to the value that was measured [71,72]. However, the uncertainty principle states that this reduction of uncertainty in one variable must be accompanied by an increase in uncertainty in a complementary variable (e.g. the momentum p of the particle), so that the total uncertainty cannot decrease below a minimum value specified by the famous Heisenberg inequality:
LPT does not (as yet) have a notion of complementary variables and does not assume a minimum value for uncertainty. In principle, a prospect with zero uncertainty, meaning that only a single development is considered for realization, would define a wholly unconscious activity. This can be conceived as a purely automatic or robotic behavior, as exemplified perhaps by sleepwalking or the arm jerking away from the wasp sting. Therefore, we may assume that the uncertainty of a prospect can take on a wide variety of values, and that higher values indicate more conscious states, in the sense that the mind is considering a wider range of potential developments. However, to do that we still need to define a scalar prospect function.
As initially suggested, the simplest way to model the overall evolution of uncertainty during consciousness is to reduce all dimensions of prospect to probabilities. This is what the active inference assumption within PP does: reducing goals and intended actions to predictions that a certain action will be performed, or that a certain goal will be achieved. That allows us to replace the “expected utility” of a goal or action with the probability that the agent will effectively select that goal or action for execution.
In our cybernetic interpretation of agency, the elementary components of prospect are not predictions, but condition-action rules, with actual predictions interpreted as internal, cognitive actions of inferring a subsequent condition. From that perspective, each condition-action rule has a certain probability to be executed in a given situation, i.e. a conjunction of conditions. That would allow us to model prospect as a probability distribution over a space of condition-action rules. A plausible constraint on that distribution is the assumption that rules whose conditions do not match the present situation have zero probability. At each moment, one or more of these rules would then be selected with the corresponding probability and executed. The corresponding action(s) would produce one or more new conditions, which would in turn induce a new probability distribution over the applicable condition-action rules, and thus a new prospect.
9. Degrees of Consciousness
Having defined consciousness as a prospect of potential developments characterized by the uncertainty H(s, t), we can now classify different states of consciousness by their degree of uncertainty. As noted, prospects with zero uncertainty, H(s, t) = 0, then correspond to unconscious states, in which the brain functions on automatic pilot, always selecting the most probable next state, and never taking the time to consider alternatives.
Given that we do not know how large the space S = {s} of potential developments (modeled as condition-action rules) is, we cannot calculate the upper bound Hmax on the uncertainty function. Even if we could define a bounded subspace S, it seems extremely unlikely that the probability distribution over this subspace would ever approach homogeneity. Such a maximum entropy Hmax would mean that the neural networks of the brain are absolutely indifferent as to which development they consider more likely. That would imply that the agent has no clue about what to expect or what to do next: it would have no information whatsoever about the situation: I = 0. Perhaps an analog of such a state could be found in states of extreme drunkenness or psychedelics-induced delirium, characterized by complete disorientation. This is obviously not a healthy state to remain in. However, milder forms of high entropy states may have therapeutic applications.
Some theories of the effect of psychedelic drugs posit that these drugs increase the entropy in the brain [73,74], reducing the constraints that otherwise canalize activation into following well-worn paths. From the PP perspective, this means that psychedelics relax the precision weighting of predictions deriving from prior beliefs about how the world is structured, thus allowing lower probability perceptions and interpretations to come to the fore and to be consciously considered [75]. This “loosening” of cognitive constraints may allow people to escape from rigidified patterns of thinking and feeling, freeing up bottled energy, and inspiring novel perspectives and creative ideas [76]. That is why psychedelic drugs are increasingly being used in psychotherapy to help people break out of obsessive or traumatic ways of thinking [2,75], which are characterized by a narrow focus on particular problems and a concomitant neglect of perceptions, feelings and actions outside that focus.
However, there are more natural and healthy ways to broaden the focus and thus increase the prospect and its associated uncertainty H. The broaden-and-build theory of positive emotions [77] proposes that positive feelings, such as relaxation, joy or playfulness, function to broaden our field of awareness. That leads us to consider a much wider range of sensations, thoughts and activities. Thus, we acquire a greater variety of knowledge, experiences, resources, and social connections, on which we can then build a better life, a more comfortable situation, and a greater resilience and ability to cope with challenges. Negative emotions, such as fear, anger, or shame, on the other hand, make us focus on the problem that caused the emotion , so that we gather the energy to combat the problem, or at least make sure it does not get out of hand.
The corresponding difference in prospect can be illustrated with two scenarios. In the positive emotion scenario, a tourist on vacation is sauntering through a beautiful city, enjoying all the sights and sounds, occasionally stopping to try some food, buy a souvenir, or chat with the locals. In the negative emotion scenario, a businessman who is late for an important meeting is rushing through that same city, having eye only for potential obstacles on the shortest path to his destination, while ignoring everything else.
We can visualize the corresponding probability distributions P(s) as the curves depicted in Figure 2. In the case of the harried businessman, the curve is very tall and narrow, peaking on the shortest path s0, with everything that does not interfere with that path having a near zero probability of being considered. In the case of the relaxed tourist, the curve is so flat that there is not really any central peak, because different directions for walking or looking appear equally attractive, and the probability distribution only starts to diminish for ventures far from the center that appear less interesting.
There are other mechanisms next to psychedelics and positive emotions that can broaden the prospect and thus increase the entropy H of the probability distribution. Mindfulness is a state in which one maintains a broad, open awareness, allowing a wide variety of sensations, feelings and thoughts to be experienced, without fixation on any single one of them [78,79]. In this state, awareness is inclusive and fluid, allowing a person to perceive thoughts, feelings, and sensory inputs as they arise and pass. The key to achieving mindfulness is to be non-judgmental. That means that you do not judge or evaluate phenomena that appear in consciousness to be good or bad, important or irrelevant. That allows at first sight insignificant or unpleasant stimuli to still enter consciousness, without being immediately suppressed by the dominant thinking patterns.
The state of mindfulness has been shown to provide a range of health benefits, including reduction of anxiety, stress and depression, better emotional regulation, greater cognitive flexibility and attentional control, reduction of pain and sleeplessness, and lower blood pressure and heart rate [80,81,82]. While these benefits have been confirmed by Western medicine and psychology, the concept and practice of mindfulness originate in Buddhism. It is worth exploring the reasoning behind this ancient philosophy, which—when making abstraction of certain metaphysical assumptions such as the eternal cycle of rebirth—is remarkably consonant with contemporary neuroscience in its understanding of consciousness [9].
10. Conditioning and Breadth of Prospect
According to Buddhism, the mind is conditioned by different “attachments”. These are desires or cravings that pull us towards certain objects or conditions, and aversions or fears that push us away from other objects or conditions. An example of a craving is the one experienced by a smoker for a cigarette when seeing other people smoke. An example of an aversion is the panic some people feel when asked to speak before an audience. In these examples, the desire or fear strongly determines or conditions the behavior of the person. The smoker will find it very difficult to resist the temptation of lighting a cigarette that is offered, while the person with public speaking anxiety will find it very difficult to accept a speaking invitation. That means that they are nearly certain to execute the following condition-action rules:
Smoker: being offered a cigarette (condition) → smoke (action)
Speaking anxiety: being asked to address an audience → refuse
If we label the condition as c and the action as a0, then the conditional probability of the action given the condition, P(a0 | c), would be nearly 1. That also means that the probability of executing any alternative action ai (i ≠ 0) would be nearly 0. In other words, the entropy of the probability distribution of potential actions given the condition would be nearly zero. The condition in this example strongly determines the expected action. Other conditions are likely to be less constraining in the way the subject reacts to them.
Nevertheless, Buddhism assumes that we are all rather strongly conditioned to react in habitual ways to our different “attachments” (desires and fears). These conditionings result from a lifetime of positive and negative reinforcements, mostly coming from the reactions of parents, peers and society, that imposed certain behaviors or ways of thinking and suppressed others. “Karma” is the term Buddhism uses to refer to this accumulated burden of conditionings that determine our habitual attitudes and our resulting intentions and actions.
The problem is that many of these rigidified attitudes are inadequate, making us desire things that do not bring real satisfaction (such as cigarettes, wealth, or fame) and fear things that are not actually harmful (such as public speaking, criticism, or being ignored). This continuing chase after things without genuine value and worry about things that are not really important results in an unpleasant state called “dukkha”. This term is commonly translated as “suffering”, but perhaps more adequately as “unsatisfactoriness” [9]. It can be understood as an inability to achieve true happiness and peace of mind. Fully liberating oneself from such attachments would bring about a kind of awakening or enlightenment, which is, depending on the tradition, known as “satori”, “nibbana” or “nirvana”. This is a state of detachment, deep insight in one’s mind, and general wisdom. It results in a genuine freedom to either ignore or follow through on the conditions we experience, rather than automatically reacting in our habitual manner (like becoming anxious at the thought of public speaking).
Buddhism has developed different methods to reduce the strength of the different conditionings that pull our attention towards or away from specific objects of attachment, thus broadening the range of consciousness. We already discussed mindfulness as an open, non-judgmental attitude that allows minor sensations to enter consciousness. A method complementary to such open monitoring of experience is focused-attention meditation [78,83]: sustaining conscious focus on a single item, such as your breathing, a word or concept, or an object, while resisting distractions that attract attention to other things.
This is intrinsically very difficult because the focus of consciousness tends to be shifting continuously, engaging with either thoughts about issues we consider important (e.g. ruminating about how we would deal with a public speech) or with different perceptual stimuli (e.g. a noise, or something moving). This restlessness and constant jumping from topic to topic is known in Buddhism as the “monkey mind”. Meditation is a method intended to train consciousness to ignore such distractions that pull attention away from the focus. This is not achieved by suppressing distracting thoughts, which is impossible (as illustrated by the injunction “do not think about a white bear” [84]), but by not engaging in them while systematically returning to the original focus. This allows experienced meditators, such as Tibetan monks, to achieve seemingly extraordinary capabilities, such as ignoring strong cold, pain and hunger [85,86,87].
This general ability to not react in an automatic, habitual way to experienced conditions can again be modelled by means of an entropy measure. If we represent the set of potentially experienced conditions as C = {cj} and the set of potential actions in response to these conditions as A = {ai}, then we can define the conditional entropy H of A given C:
Busseniers [88,89] has proposed a measure of the determination of a set A by a set C, defined by the following formula:
Applied to condition-action rules, this formula quantifies the degree to which actions A (which as before include mental actions such as thoughts or feelings) are determined by conditions C. If actions would be independent of conditions, then the conditional entropy of actions depending on the conditions H(A|C) would be equal to the entropy of the actions H(A) that does not take into account conditions. In that case, Det (A|C) = 0. That would describe an agent that is completely indifferent to the conditions which it experiences. It is free to do, think, or feel whatever it pleases, independently of its actual situation. This is of course an exceptional state that perhaps may only be temporarily achieved during certain psychedelic or mystical experiences in which the subject loses all sense of being an individual self subjected to the conditions here and now. However, this is not a state that can be maintained over a long term, because it implies that the subject would be completely unreactive to conditions such as hunger, pain or freezing. According to some interpretations, this is how the historical Buddha, Siddhartha Gautama, died—bringing himself via meditation into a state of Nirvana where he no longer experienced the difference between life and death.
The opposite of this state would be one of maximum determination:
Here, there is no freedom, uncertainty or choice about how to act or what to think: H(A|C) = 0. For every condition ci that can be experienced, there is only a single possible reaction aj: P(aj|ci) = 1, P(ak, k ≠ j|ci) = 0. This would describe an agent whose cognitive processes and behavior would be completely automatic or deterministic. That would imply an agent—such as a wasp or a person that is sleepwalking—that lacks any form of consciousness or free will. (Note that we here ignore the possible effects of noise in the wasp’s nervous system that could produce a non-zero entropy in its reactions, because such noise does not define a prospect of potential developments that can be consciously considered).
The more realistic cases of human consciousness are intermediate between these two extremes:
Let us define breadth B of prospect (0 ≤ B < ∞) as:
B can be interpreted as a measure of the degree to which consciousness is wide open (large B), like in mindfulness or the example of the sauntering tourist, or limited to a narrow range of options (small B), as in the example of the harried businessman (Fig. 2). This measure in principle allows us to rank different degrees of consciousness, and thus to distinguish different mental states, as e.g. accompanying positive and negative emotions, or psychedelic and meditative experiences.
The psychiatrist Deikman has proposed that meditation—whether mindfulness-based or focused-attention—can lead to a deautomatization of patterns of thinking and feeling [90,91,92]. This is a process by which automatic neural and cognitive reactions are temporarily suspended, allowing for a more direct and unmediated experience of reality. As we noted, much of human perception and cognition operates on autopilot, shaped by ingrained neural connections and conditioned habits. These automatic processes filter and interpret sensory input based on prior experiences and learned frameworks. Such automatic functioning is efficient and dependable for routine behavior. However, it limits awareness to stereotypical ways of perceiving, understanding, and thinking. These tend to subdivide phenomena into rigid categories [93], such as desirable or aversive conditions, specific types of objects, and the subject, “I” or self, that perceives these objects. Deikman argued that meditation interrupts these automatic processes, allowing for a less rigidly structured experience of the situation. This hypothesis was empirically confirmed by later research [92,94]
Such deautomatization allows individuals to experience reality in a broader, more open, and more fluid manner. Such experience includes a more direct awareness of sensory phenomena without labels or categories [93], a dissolution of the conventional boundaries between the self and external objects (non-duality), and a heightened sense of unity or interconnectedness with the world. Similar feelings can be found in descriptions of psychedelic, self-transcendent, or mystical experiences in different spiritual traditions [95]. Deautomatization through meditation also aligns with the Buddhist goal of liberation from attachments, while increasing creativity and flexibility of thought. In our framework, it can be seen as a mechanism for increasing the breadth of prospect B, by reducing the strength of conditioning Det(A|C).
11. Non-Dual Consciousness
Let us further explore the ultimate state of enlightenment or nirvana in which external conditions no longer determine the content of consciousness. This state can sometimes be achieved by prolonged meditation sessions in which sensory stimulation is reduced to a minimum, e.g. by meditating for days in a dark and silent space. That helps the meditator to get a sense of consciousness as an autonomous process independent of external conditions. The following describes how one of us experienced such a state.
Free from predictions, implications, and identifications, yet aware of its condition, enlightenment means ceaselessly abiding in the state of full identification with awareness itself. In this non-dual state, awareness is all that exists, and the structures previously erected within the awareness field lose their grounding that was previously sustained by the energy of awareness. The dissolution of these structures releases distortions in the awareness field caused by the constriction of the field to support concepts, such as one’s perceived identity. The dropping of identification relaxes awareness, allowing everything to return to the awareness process. Awareness is restored to its pristine state, free from the social, cultural, psychological, and conditioned identifications one has come to assume as defining their identity. This realization leads to the further understanding that the self does not truly exist as an independent entity, and that the belief that one is something or someone—a construction to be maintained through exertion of mental energy—is fundamentally erroneous.
This fundamental error is a shared human misconception, a common game that leads to suffering and ignorance. One’s subjective experience is not genuine until this realization occurs. Genuine subjective experience is an inherent property of the awareness process itself; that is, awareness is aware of itself. This understanding reveals that the awareness process is, by nature, dynamic, self-referential, and thus experiential.
This abstract idea can be visualized with the metaphor of a trampoline’s surface. Without any external force, the trampoline is naturally bouncy. This bounciness is experienced by awareness itself, leading to the generation of thoughts. However, when a heavy object is thrown onto the trampoline, it bounces back and deforms. This can lead one to assume that the trampoline’s bounce is caused by the external object. Such assumptions misplace the source of subjectivity, taking the nature of awareness outside itself. Predictive processing follows this path, wherein predictions help the trampoline respond to objects or concepts, shaped by one’s tastes and habits.
In this view, subjective experience is located externally, suggesting that the brain’s predictions are needed to curate one’s subjectivity. The “hard problem” of subjective or qualitative experience becomes difficult to address because it is viewed through the lens of awareness as something influenced by the external world.
But awareness is aware of itself. It is the driving force behind the experience of nothing but itself. Oneness here means that the foundation of all phenomena is awareness, aware of itself. In other words, awareness is genuinely and subjectively experiencing itself. This is the qualitative nature of consciousness: a dynamic, self-sustaining, liberated awareness in the driver’s seat. The question arises: Who is having these thoughts? Are they predictions of my brain, or is it awareness itself?
These thoughts are generated by awareness naturally observing itself, unimpeded by the restrictions of the self-concept. The thought of “I” can no longer be sustained once awareness is fully exposed to itself.
It is like the sun emerging from behind the clouds—the sky is no longer cloudy. Freed from the clouds of implications, awareness emerges naturally, and nothing else can sustain existence in the light of this realization. Existence is awareness. Awareness is existence. “I” do not exist. My awareness exists. My form exists. But the concept of “me” never existed as an independent entity—it never will. This realization is powerfully liberating, as it releases the heavy burden of one’s concept of existence. Awareness is sufficient on its own, without needing external support.
The form, now filled with self-knowing awareness, gradually transforms into a being of positivity. Goodness, kindness, love, and compassion flow effortlessly from this keen awareness, reaching out to connect itself with others. Like a small cloud in the sky, it joins another, and another, without second thought.
Awareness is also self-sufficient and self-sustaining. This leads to the emergence of compassion, non-violence, and friendship—qualities inherent in the self-sufficient awareness field. This does not entail renouncing life. On the contrary, it marks the beginning of something unique: freedom of one’s being in experiencing all that there is. A high tolerance for entropy without disintegration of the awareness field. Pain does not disappear but suffering ceases as a result of the profound liberation of awareness to its original state.
12. Operationalizing Prospect
The previous sections have proposed an approach for formalizing the notion of prospect by means of an entropy-based mathematical measure of breadth B. However, to be able to test the local prospect theory in the real world, we would also need to operationalize this notion, that is, develop methods to empirically measure the breadth of prospect of people in different circumstances—e.g. before and after a meditation session. Directly calculating entropy measures does not seem doable, given that we do not know the extent of the prospected action space A or the conditional probabilities P(a|c) of some action a given a condition c. Therefore, we will need to find plausible indicators or proxies for the relevant variables.
Empirical tests of the broaden-and-build theory of positive emotions have used two indicators for breadth of awareness [77]: one for actions and one for perceptions. The action measure is most straightforward: give people a sheet of paper and ask them to write down all the actions they might consider doing at this moment. The larger the number of action items they register, the broader their awareness (or what we call “prospect”). Using this measure, the theory’s main prediction was confirmed: people that were made to feel positive emotions wrote down a broader range of potential actions than people made to feel negative emotions. A related operationalization is the one used to measure divergent thinking, which is associated with creativity. Here, subjects are asked to produce as many answers as they can think of within a given time span to an open-ended question, such as “what could you use a brick for?”. A larger variety of answers may indicate a broader prospect.
The perceptual indicator is more subtle: subjects are asked to describe a picture that exhibits patterns at two levels of perception, locally and globally [96]. For example, the picture consists of many small T-shaped patterns that together form a big L-shape. Those who refer to the global pattern (L) are considered to have a broader awareness than those who refer only to the local patterns (T) [77]. Another possible testing paradigm for breadth of perception is to show pictures that include both objects in focus and features in the surrounding context or background [97]. Subjects with a broader awareness are likely to notice, remember or recognize more background features than those with a narrow focus.
A further promising approach is to measure the degree of automaticity of some cognitive or behavioral performance. In psychology, this is often measured by means of the Stroop task. Here, subjects are asked to name the color in which a word is printed (e.g. green), but without reading the word itself, which is the name of a different color (e.g. red). Doing this for a long list of different color words is difficult because we are trained to read words rather than ascertain the color of their ink. Reading the word is an automatic reaction that must be ignored in order to efficiently perform this task. There is evidence that meditators perform better in this and similar tasks, suggesting that they are less determined in their reactions by their automatisms [92,94].
A different approach to operationalizing prospect may the perplexity, which is a measure of the unpredictability of a pattern. As suggested by the example of the sauntering tourist and the harried businessman, a person with a broader prospect is likely to behave in a less predictable manner, following a less straightforward or obvious trajectory. Perplexity is defined as an exponential function of entropy [98,99]. Calculating it thus also requires knowledge of an a priori probability distribution. While we do not know the probabilities within an agent’s mental prospect, we may be able to develop a predictive model of its behavior via machine learning methods that induce recurrent patterns from its observable behavior. For example, a typical pattern of leg movement during a goal-directed walk over a flat surface is quite predictable. A model trained on common walking data should be able to predict the next step of a standard goal-directed walk with a high probability of being correct, implying a low uncertainty/entropy and therefore a low perplexity. However, that same model would find it much more difficult to predict the trajectory of the sauntering tourist or the hiker in the forest.
Similar measures are used in AI to evaluate the performance of LLMs (Large Language Models) that generate text by each time adding a word to the sequence of words that is already there with a probability conditional on the preceding sequence. Here, the perplexity of a particular sentence can be measured in terms of the probabilities P(si) assigned by the language model to each of the N words (si | i = 1, …, N) as they are subsequently generated to produce the text [100], according to the following formula:
Such a measure will assign low perplexity (= high predictability) to common phrases, such as “The weather forecast says that it will rain tomorrow”, and high perplexity to uncommon, creative expressions, such as “Translucent sails flutter in the breeze of a turquoise ocean”.
LPT assumes that people with a broad prospect hold a wider variety of potential actions in mind and that they are therefore less likely to produce the most probable or most obvious reaction to a given condition (such as the beginning of a sentence to be completed). That suggests that the language and behavior generated in a state of broad prospect would be characterized by higher perplexity. That hypothesis can potentially be tested using LLMs that can calculate the perplexity of text fragments. A typical experiment would be to let two groups of people each individually write a text on a given topic—e.g. a group that has been meditating and a control group that was occupied with some other activity. LPT would then predict that the texts of the first group would have a higher average perplexity than the control group.
Similar experiments could be done using predictive models of other sequential behaviors, such as walking, moving the body, or scanning a scene with the eyes. In the latter case, LPT would predict that the trajectory of the gaze of a person in broad prospect mode would be less concentrated on the salient objects in focus (such as people, faces, or eyes), while exploring a wider range of features in the scene, thus being less predictable or more entropic.
Using these and related operational measures, it should be possible to distinguish between different degrees of consciousness as defined by LPT, and to determine which initial conditions (such as positive emotions, mindfulness, meditation, or use of psychedelic drugs) tend to affect that degree.
13. Conclusions
We have summarized and further elaborated a new theory of consciousness, the Local Prospect Theory (LPT), which purports to explain in particular subjective experience. Like Predictive Processing (PP) theory, LPT assumes that the core function of cognition in the brain is to make sense of experienced situations by identifying, explaining, and predicting perceived aspects of the situation, and using these interpretations to select and perform appropriate actions. However, unlike PP, LPT does not assume that the ultimate aim of this mechanism is to minimize uncertainty. Maximizing the accuracy of predictions and thus minimizing uncertainty, as PP assumes, is important for immediately recognizing and reacting to a situation. This kind of sense-making and acting happens automatically and unconsciously: we may be conscious of the result but not of the process through which this result was achieved.
In contrast to such automatic sense-making, LPT assumes that conscious sense-making implies freedom: the ability to consider different possible developments to focus on, think about, or act towards. That means that there is a space S = {s} between the stimulus (the situation as sensed) and the response (the brain’s interpretation and decision to act). That implies that the agent has a range of potential reactions from which it can choose what to consider or what to do. We call that range the local prospect. It is a prospect because it provides a view of potential developments that allows the agent to some degree to anticipate or plan what can happen next. It is local because the prospect typically does not extend much beyond the here-and-now of the situation as presently experienced, becoming increasingly fuzzy for more remote potentials.
The prospect is not an objective representation of probable futures, but a subjective appreciation pointing towards possibilities that are important, meaningful or valuable for the agent. Thus, it is to some degree comparable to a fitness landscape, indicating the locally best (fittest) and worst potentialities, or to a field of forces pushing and pulling the agent towards the good and away from the bad. The different aspects of this field of subjective meaning may be captured by what we introduced as the six components of sense-making: perception, identification (recognition), explanation, prediction, intention (goals), and action (affordances). The active inference extension to PP implicitly assumes similar functions. The difference is that PP reduces all these functions to predictions, including the choice of goals and execution of actions, conceived as “active inferences”. LPT, on the other hand, proposes to model them by means of condition-action rules, considering inferences and predictions as internal (mental) actions.
The reason PP reduces all mental activities to predictions is its assumption that the brain’s fundamental dynamics is to maximize the accuracy of its predictions. LPT, on the other hand, assumes that there is a fundamental uncertainty about the best way to act: our goals are not preprogrammed predictions, but choices that are typically freely made by considering a range of options that may be better or worse, but none of which is unequivocally the best. Making that choice requires consideration and deliberation, i.e. taking the time to sense, understand and evaluate more than one option. That requires keeping some of the options in mind so that different neural processes can work with them.
Building on the Global (Neuronal) Workspace Theory of consciousness [5,6], we proposed that this is achieved by the brain maintaining a distributed process of circulating activation—a self-reinforcing process that has been called an adaptive resonance [4,7]. This activation pattern functions as a temporary, working memory of the present situation, providing more specialized brain modules with access to this global understanding. The Global Workspace theory proposes a plausible model of access consciousness, the mechanism that gives the agent access to certain cognitive processes, so that it can to some degree examine and control these processes. This conscious control is what underlies the concept of free will: the ability to ignore automatic reflex reactions and weigh the pros and cons of different possibilities before deciding how to react.
We explained this deliberation by using the analogy of the society of mind: different specialized modules in the brain collectively solve a problem by proposing partial solutions and reacting to proposals of others within the internal discussion forum known as the global workspace. Because modules function independently and asynchronously, while their “conversation” is non-linear and sensitive to initial conditions, the outcome of this discussion is typically unpredictable. This explains the apparent indeterminism of free will without requiring any metaphysical assumptions.
We further explained the function of feeling, subjective experience or “phenomenal consciousness” in helping the mind come to a good decision. Feeling can be understood as the field of “forces” pushing and pulling the resonance in different directions, thus shaping the “fitness landscape” of prospect. Prospect itself can be understood as a halo of activation spreading out of—and feeding to some degree back into—the resonance. This “cloud” or “wave” of diffusing activation prepares the way for shifts in the core resonance, but without determining its dynamics. This complex neural dynamics is very different from the one underlying automatic, unconscious processes, where activation propagates in an immediate, feedforward manner from stimulus (condition) to response (action), leaving no time or opportunity for other modules to monitor or intervene.
We then considered more abstract models of local prospect as a wave of probability density on a space of states representing potential situations as envisaged by the brain. The inherent uncertainty of prospect can be expressed by the entropy H of this probability distribution, while its information content can be expressed by the difference between this entropy and maximum entropy: I = Hmax – H. A more precise model considers the probability distribution of condition-action pairs. This allowed us to define the conditional entropy of actions A, given conditions C: H(A|C). That in turn allowed us to define a measure of the determination of actions by conditions: Det(A|C).
Using this measure, we were able to reformulate the intuitive ideas about consciousness formulated by Buddhism in a more precise manner [9]. Buddhism assumes that much of our thinking and behavior is conditioned by “attachments”: automatic reactions to certain conditions as being intrinsically desirable (cravings) or aversive (fears). These conditionings make it difficult to lead a life that is truly free or to achieve long-term happiness. Buddhism has therefore developed different practices that help to liberate us from such conditionings. The ones that have been studied in most depth are mindfulness and focused-attention meditation [83]. Both have been shown to provide a range of health benefits [80,86,101], while reducing the automatism of categorizations and reactions [92,94]. In the limit, such practices may allow one to reach a state of complete freedom from conditioning that would correspond to Det(A|C) = 0.
While this is not a state that can be sustained over the long term, it may give us a glimpse of undifferentiated consciousness, as a process that can self-maintain even without external stimulation. The hard problem of consciousness may actually consist in our difficulty in grasping this kind of “ultimate” subjective experience. It remains hard in part because we tend to erroneously assume that the driver of consciousness is situated outside this subjective process.
We further defined the breadth of prospect B in terms of conditional entropy, as a measure of the range of thoughts or actions that are potentially considered in different conditions. The smaller B, the narrower the prospect, the more automatic or the less conscious the reactions. Various observations suggest that B would be larger in situations characterized by positive emotions, mindfulness, consumption of psychedelic drugs, and after meditation. To test these hypotheses, it would be necessary to operationalize breadth of prospect, i.e. develop empirical indicators for B in different states of consciousness. We suggested a number of plausible indicators, including number of actions considered, width of perceptual focus, and perplexity (unpredictability) of language or behavior produced.
Using such indicators and mathematical measures, it should be possible to further elaborate and test the proposed Local Prospect Theory of consciousness [3,4]. While this theory is still in an early stage of development, we hope that our arguments will convince researchers to further investigate the ideas proposed here, and thus hopefully contribute to solving the “hard problem of consciousness”.
Author Contributions
both authors contributed equally to the production of this article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Chalmers, D.J. Facing up to the Problem of Consciousness. Journal of Consciousness Studies 1995, 2, 200–219. [Google Scholar]
- Blackmore, S.; Troscianko, E.T. Consciousness: An Introduction, 4th ed.; Routledge, 2024; ISBN 978-1-03-229256-4. [Google Scholar]
- Heylighen, F.; Beigi, S. The Local Prospect Theory of Subjective Experience (Working Paper) 2023.
- Heylighen, F.; Beigi, S. The Local Prospect Theory of Subjective Experience: A Soft Solution to the Hard Problem of Consciousness. Journal of Consciousness Studies 2024, 31. [Google Scholar] [CrossRef]
- Dehaene, S. Consciousness and the Brain: Deciphering How the Brain Codes Our Thoughts; Penguin, 2014; ISBN 0-698-15140-2.
- Mashour, G.A.; Roelfsema, P.; Changeux, J.-P.; Dehaene, S. Conscious Processing and the Global Neuronal Workspace Hypothesis. Neuron 2020, 105, 776–798. [Google Scholar] [CrossRef] [PubMed]
- Grossberg, S. Adaptive Resonance Theory: How a Brain Learns to Consciously Attend, Learn, and Recognize a Changing World. Neural Networks 2013, 37, 1–47. [Google Scholar] [CrossRef]
- Grossberg, S. Towards Solving the Hard Problem of Consciousness: The Varieties of Brain Resonances and the Conscious Experiences That They Support. Neural Networks 2017, 87, 38–95. [Google Scholar] [CrossRef] [PubMed]
- Wright, R. Why Buddhism Is True: The Science and Philosophy of Meditation and Enlightenment, Later prt. edition; Simon & Schuster: New York, 2017; ISBN 978-1-4391-9545-1. [Google Scholar]
- Clark, A. Whatever next? Predictive Brains, Situated Agents, and the Future of Cognitive Science. Behavioral and brain sciences 2013, 36, 181–204. [Google Scholar] [CrossRef]
- Friston, K.J. Does Predictive Coding Have a Future? Nature neuroscience 2018, 21, 1019–1021. [Google Scholar] [CrossRef] [PubMed]
- Hohwy, J. New Directions in Predictive Processing. Mind & Language 2020, 35, 209–223. [Google Scholar] [CrossRef]
- The Philosophy and Science of Predictive Processing; Mendonça, D., Curado, M., Gouveia, S.S., Eds.; Bloomsbury Publishing, 2020; ISBN 978-1-350-09976-0. [Google Scholar]
- Kirchhoff, M.D.; Kiverstein, J. Extended Consciousness and Predictive Processing: A Third-Wave View; Routledge: London, 2019; ISBN 978-1-315-15042-0. [Google Scholar]
- Seth, A. Being You: A New Science of Consciousness; Dutton: New York, New York, 2021; ISBN 978-1-5247-4287-4. [Google Scholar]
- Miller, M.; Clark, A.; Schlicht, T. Editorial: Predictive Processing and Consciousness. Rev.Phil.Psych. 2022, 13, 797–808. [Google Scholar] [CrossRef]
- Friston, K.J.; Kiebel, S. Predictive Coding under the Free-Energy Principle. Philosophical Transactions of the Royal Society B: Biological Sciences 2009, 364, 1211–1221. [Google Scholar] [CrossRef]
- Klein, G.; Moon, B.; Hoffman, R.R. Making Sense of Sensemaking 1: Alternative Perspectives. IEEE intelligent systems 2006, 21, 70–73. [Google Scholar] [CrossRef]
- Colombetti, G. Enaction, Sense-Making and Emotion. Enaction: Toward a new paradigm for cognitive science, 2010; 145–164. [Google Scholar]
- Heylighen, F.; Busseniers, E. Modeling Autopoiesis and Cognition with Reaction Networks. Biosystems 2023, 230, 104937. [Google Scholar] [CrossRef] [PubMed]
- Heylighen, F.; Joslyn, C. Cybernetics. In Encyclopedia of Physical Science and Technology; Meyers, R.A., Ed.; Academic Press: New York, 2003; Vol. 4, pp. 155–169. ISBN 978-0-12-227410-7. [Google Scholar]
- Heylighen, F. The Meaning and Origin of Goal-Directedness: A Dynamical Systems Perspective. Biological Journal of the Linnean Society 2022, blac060. [Google Scholar] [CrossRef]
- Aerts, D.; Apostel, L.; De Moor, B.; Hellemans, S.; Maex, E.; Van Belle, H.; Van der Veken, J. Worldviews: From Fragmentation to Integration; VUB Press: Brussels, 2002. [Google Scholar]
- Vidal, C. Wat Is Een Wereldbeeld? (What Is a Worldview?). In Nieuwheid denken. De wetenschappen en het creatieve aspect van de werkelijkheid; Van Belle, H., Van Der Veken, J., Eds.; Acco, 2008; pp. 71–86. ISBN 978-90-334-7078-3. [Google Scholar]
- Seth, A.K. The Cybernetic Bayesian Brain; Open MIND. Frankfurt am Main: MIND Group, 2014. [Google Scholar]
- Friston, K.; FitzGerald, T.; Rigoli, F.; Schwartenbeck, P.; Pezzulo, G. Active Inference: A Process Theory. Neural Computation 2017, 29, 1–49. [Google Scholar] [CrossRef]
- Sajid, N.; Ball, P.J.; Parr, T.; Friston, K.J. Active Inference: Demystified and Compared. Neural Computation 2021, 33, 674–712. [Google Scholar] [CrossRef] [PubMed]
- Smith, R.; Ramstead, M.J.D.; Kiefer, A. Active Inference Models Do Not Contradict Folk Psychology. Synthese 2022, 200, 81. [Google Scholar] [CrossRef]
- Turchin, V. On Cybernetic Epistemology. Syst. Res. 1993, 10, 3. [Google Scholar] [CrossRef]
- Holland, J.H.; Holyoak, K.J.; Nisbett, R.E.; Thagard, P.R. Induction: Processes of Inference, Learning, and Discovery; MIT Press, 1989; ISBN 978-0-262-58096-0. [Google Scholar]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach; Prentice hall, 2009.
- Heylighen, F. A Tale of Challenge, Adventure and Mystery: Towards an Agent-Based Unification of Narrative and Scientific Models of Behavior; ECCO; Vrije Universiteit Brussel: Brussels, Belgium, 2012. [Google Scholar]
- Sourjik, V.; Wingreen, N.S. Responding to Chemical Gradients: Bacterial Chemotaxis. Current Opinion in Cell Biology 2012, 24, 262–268. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J. Deep Learning in Neural Networks: An Overview. Neural Networks 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Poggio, T.; Poggio, T.A.; Anselmi, F. Visual Cortex and Deep Networks: Learning Invariant Representations; MIT Press, 2016; ISBN 978-0-262-03472-2.
- Mikolajczyk, T.; Mikołajewska, E.; Al-Shuka, H.F.N.; Malinowski, T.; Kłodowski, A.; Pimenov, D.Y.; Paczkowski, T.; Hu, F.; Giasin, K.; Mikołajewski, D.; et al. Recent Advances in Bipedal Walking Robots: Review of Gait, Drive, Sensors and Control Systems. Sensors 2022, 22, 4440. [Google Scholar] [CrossRef] [PubMed]
- Seth, A.K.; Bayne, T. Theories of Consciousness. Nat Rev Neurosci 2022, 23, 439–452. [Google Scholar] [CrossRef] [PubMed]
- Shepherd, J. Free Will and Consciousness: Experimental Studies. Consciousness and Cognition 2012, 21, 915–927. [Google Scholar] [CrossRef] [PubMed]
- Baars, B.J. The Global Workspace Theory of Consciousness. The Blackwell companion to consciousness 2007, 236–246. [Google Scholar]
- Hunt, T.; Schooler, J.W. The Easy Part of the Hard Problem: A Resonance Theory of Consciousness. Frontiers in Human Neuroscience 2019, 13, 378. [Google Scholar] [CrossRef] [PubMed]
- Lamme, V.A.F.; Roelfsema, P.R. The Distinct Modes of Vision Offered by Feedforward and Recurrent Processing. Trends in Neurosciences 2000, 23, 571–579. [Google Scholar] [CrossRef]
- Lamme, V.A.F. Challenges for Theories of Consciousness: Seeing or Knowing, the Missing Ingredient and How to Deal with Panpsychism. Philosophical Transactions of the Royal Society B: Biological Sciences 2018, 373, 20170344. [Google Scholar] [CrossRef] [PubMed]
- Wittmann, M. Moments in Time. Front. Integr. Neurosci. 2011, 5. [Google Scholar] [CrossRef]
- Noë, A. Out of Our Heads: Why You Are Not Your Brain, and Other Lessons from the Biology of Consciousness; Farrar, Straus and Giroux, 2010; ISBN 978-1-4299-5719-9.
- Heylighen, F.; Beigi, S. Mind Outside Brain: A Radically Non-Dualist Foundation for Distributed Cognition. In Socially Extended Epistemology; Carter, J.A., Clark, A., Kallestrup, J., Palermos, S.O., Pritchard, D., Eds.; Oxford University Press: Oxford, 2018; pp. 59–86. ISBN 978-0-19-880176-4. [Google Scholar]
- Telakivi, P. Extending the Extended Mind: From Cognition to Consciousness; Springer Nature, 2023; ISBN 978-3-031-35624-7.
- Sozzi, S.; Decortes, F.; Schmid, M.; Crisafulli, O.; Schieppati, M. Balance in Blind Subjects: Cane and Fingertip Touch Induce Similar Extent and Promptness of Stance Stabilization. Frontiers in Neuroscience 2018, 12. [Google Scholar] [CrossRef]
- Tononi, G. An Information Integration Theory of Consciousness. BMC Neurosci 2004, 5, 42. [Google Scholar] [CrossRef]
- Tononi, G. Consciousness as Integrated Information: A Provisional Manifesto. The Biological Bulletin 2008, 215, 216. [Google Scholar] [CrossRef] [PubMed]
- Dennett, D.C.; Weiner, P. Consciousness Explained; Penguin London, 1993. [Google Scholar]
- Dennett, D.C. Are We Explaining Consciousness Yet? Cognition 2001, 79, 221–237. [Google Scholar] [CrossRef]
- Heylighen, F. Why Emergence and Self-Organization Are Conceptually Simple, Common and Natural. In Proceedings of the Science Week on Complexity, UM6P, Ben Guerir, 2023. 2023. [Google Scholar]
- Nicolis, G.; Prigogine, I. Self-Organization in Nonequilibrium Systems: From Dissipative Structures to Order through Fluctuations; Wiley, New York, 1977.
- Prigogine, I.; Stengers, I. Order Out of Chaos: Man’s New Dialogue with Nature; Bantam Books, 1984; ISBN 978-0-553-34082-2.
- Dittrich, P.; Fenizio, P.S. di Chemical Organisation Theory. Bull. Math. Biol. 2007, 69, 1199–1231. [Google Scholar] [CrossRef]
- Heylighen, F.; Beigi, S.; Veloz, T. Chemical Organization Theory as a General Modeling Framework for Self-Sustaining Systems. Systems 2024, 12, 111. [Google Scholar] [CrossRef]
- Block, N. On a Confusion about a Function of Consciousness. Behavioral and Brain Sciences 1995, 18, 227–287. [Google Scholar] [CrossRef]
- Baars, B.J. Introduction: Treating Consciousness as a Variable: The Fading Taboo. In Essential Sources in the Scientific Study of Consciousness; Baars, B.J., William P. Banks, W.P., Newman, J.B., Eds.; MIT Press, 2003. [Google Scholar]
- Mangan, B. Cognition, Fringe Consciousness, and the Legacy of William James. In The Blackwell Companion to Consciousness; Velmans, M., Schneider, S., Eds.; John Wiley & Sons, Ltd: Hoboken NJ, 2007; pp. 671–685. ISBN 978-0-470-75146-6. [Google Scholar]
- Roediger III, H.L.; Balota, D.A.; Watson, J.M. Spreading Activation and Arousal of False Memories. The nature of remembering: Essays in honor of Robert G. Crowder, 2001; 95–115. [Google Scholar]
- Colombetti, G. Appraising Valence. Journal of Consciousness Studies 2005, 8, 103–126. [Google Scholar]
- Hayes-Roth, B. A Blackboard Architecture for Control. Artificial Intelligence 1985, 26, 251–321. [Google Scholar] [CrossRef]
- Minsky, M. The Society of Mind; Simon & Schuster: New York, 1988; ISBN 978-0-671-65713-0. [Google Scholar]
- Theraulaz, G.; Bonabeau, E. A Brief History of Stigmergy. Artificial Life 1999, 5, 97–116. [Google Scholar] [CrossRef]
- Heylighen, F. Stigmergy as a Universal Coordination Mechanism I: Definition and Components. Cognitive Systems Research 2016, 38, 4–13. [Google Scholar] [CrossRef]
- Stewart, I. Sources of Uncertainty in Deterministic Dynamics: An Informal Overview. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences 2011, 369, 4705–4729. [Google Scholar] [CrossRef] [PubMed]
- Kuznetsov, O.P. Asynchronous Multi-Agent MultisortedSystems. Autom Remote Control 2021, 82, 294–307. [Google Scholar] [CrossRef]
- Heylighen, F. The Science of Self-Organization and Adaptivity. In The Encyclopedia of Life Support Systems; EOLSS Publishers Co Ltd, 2001; Vol. 5, pp. 253–280. ISBN 978-1-84826-913-2. [Google Scholar]
- Heylighen, F. Self-Organization in Communicating Groups: The Emergence of Coordination, Shared References and Collective Intelligence. In Complexity Perspectives on Language, Communication and Society; Massip-Bonet, À., Bastardas-Boada, A., Eds.; Understanding Complex Systems; Springer: Berlin, Germany, 2013; pp. 117–149. ISBN 978-3-642-32816-9. [Google Scholar]
- Albeverio, S.A.; Høegh-Krohn, R.J.; Mazzucchi, S. Mathematical Theory of Feynman Path Integrals; Lecture Notes in Mathematics; Springer: Berlin, Heidelberg, 2008; Volume 523, ISBN 978-3-540-76954-5. [Google Scholar]
- Tumulka, R. On Spontaneous Wave Function Collapse and Quantum Field Theory. In Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences; The Royal Society, 2006; Volume 462, pp. 1897–1908. [Google Scholar]
- Heylighen, F. Entanglement, Symmetry Breaking and Collapse: Correspondences Between Quantum and Self-Organizing Dynamics. Found Sci 2023, 28, 85–107. [Google Scholar] [CrossRef]
- Carhart-Harris, R.L.; Leech, R.; Hellyer, P.J.; Shanahan, M.; Feilding, A.; Tagliazucchi, E.; Chialvo, D.R.; Nutt, D. The Entropic Brain: A Theory of Conscious States Informed by Neuroimaging Research with Psychedelic Drugs. Front. Hum. Neurosci. 2014, 8. [Google Scholar] [CrossRef] [PubMed]
- Carhart-Harris, R.L. The Entropic Brain - Revisited. Neuropharmacology 2018, 142, 167–178. [Google Scholar] [CrossRef] [PubMed]
- Carhart-Harris, R.L.; Friston, K.J. REBUS and the Anarchic Brain: Toward a Unified Model of the Brain Action of Psychedelics. Pharmacol Rev 2019, 71, 316–344. [Google Scholar] [CrossRef] [PubMed]
- Gabora, L. A Possible Role for Entropy in Creative Cognition 2016.
- Fredrickson, B.L. The Broaden-and-Build Theory of Positive Emotions. Philosophical Transactions of the Royal Society B: Biological Sciences 2004, 359, 1367. [Google Scholar] [CrossRef]
- Raffone, A.; Tagini, A.; Srinivasan, N. Mindfulness and the Cognitive Neuroscience of Attention and Awareness. Zygon® 2010, 45, 627–646. [Google Scholar] [CrossRef]
- Beigi, S. Mindful Smart Cities: Rethinking Smart Cities with Mindfulness Engineering; VUBPRESS: Brussels, 2020; ISBN 978-90-5718-083-5. [Google Scholar]
- Grossman, P.; Niemann, L.; Schmidt, S.; Walach, H. Mindfulness-Based Stress Reduction and Health Benefits: A Meta-Analysis. Journal of psychosomatic research 2004, 57, 35–43. [Google Scholar] [CrossRef]
- Ludwig, D.S.; Kabat-Zinn, J. Mindfulness in Medicine. JAMA 2008, 300, 1350–1352. [Google Scholar] [CrossRef] [PubMed]
- Semple, R.J.; Burke, C. State of the Research: Physical and Mental Health Benefits of Mindfulness-Based Interventions for Children and Adolescents. OBM Integrative and Complementary Medicine 2019, 4, 1–58. [Google Scholar] [CrossRef]
- Laukkonen, R.E.; Slagter, H.A. From Many to (n)One: Meditation and the Plasticity of the Predictive Mind. Neuroscience & Biobehavioral Reviews 2021, 128, 199–217. [Google Scholar] [CrossRef]
- Wegner, D.M.; Schneider, D.J.; Carter, S.R.; White, T.L. Paradoxical Effects of Thought Suppression. Journal of Personality and Social Psychology 1987, 53, 5–13. [Google Scholar] [CrossRef] [PubMed]
- Benson, H.; Malhotra, M.S.; Goldman, R.F.; Jacobs, G.D.; Hopkins, P.J. Three Case Reports of the Metabolic and Electroencephalographic Changes during Advanced Buddhist Meditation Techniques. Behavioral Medicine 1990, 16, 90–95. [Google Scholar] [CrossRef] [PubMed]
- Zeidan, F.; Grant, J.A.; Brown, C.A.; McHaffie, J.G.; Coghill, R.C. Mindfulness Meditation-Related Pain Relief: Evidence for Unique Brain Mechanisms in the Regulation of Pain. Neuroscience Letters 2012, 520, 165–173. [Google Scholar] [CrossRef]
- Lutz, A.; McFarlin, D.R.; Perlman, D.M.; Salomons, T.V.; Davidson, R.J. Altered Anterior Insula Activation during Anticipation and Experience of Painful Stimuli in Expert Meditators. NeuroImage 2013, 64, 538–546. [Google Scholar] [CrossRef]
- Busseniers, E. Self-Organization versus Hierarchical Organization. PhD thesis, Free University of Brussels (VUB), 2018. [Google Scholar]
- Busseniers, E. Autonomous Change. Systems Research and Behavioral Science 2023. [Google Scholar]
- Deikman, A.J. De-Automatization and the Mystic Experience. Psychiatry: Journal for the Study of Interpersonal Processes, 1966. [Google Scholar]
- Deikman, A.J. A Functional Approach to Mysticism. Journal of Consciousness Studies 2000, 7, 75–92. [Google Scholar]
- Kihlstrom, J.F. Meditation and Deautomatization. In Encyclopedia of Religious Psychology and Behavior; Shackelford, T., Ed.; Springer Nature Switzerland: Cham, 2025; pp. 1–11. ISBN 978-3-031-38971-9. [Google Scholar]
- Heylighen, F. Transcending the Rational Symbol System: How Information and Communication Technology Integrates Science, Art, Philosophy, and Spirituality into a Global Brain. In Oxford Handbook of Human Symbolic Evolution; Gontier, N., Lock, A., Sinha, C., Eds.; Oxford University Press, 2024; ISBN 978-0-19-881378-1. [Google Scholar]
- Kang, Y.; Gruber, J.; Gray, J.R. Mindfulness: Deautomatization of Cognitive and Emotional Life. In The Wiley Blackwell Handbook of Mindfulness; John Wiley & Sons, Ltd, 2014; pp. 168–185. ISBN 978-1-118-29489-5. [Google Scholar]
- Yaden, D.B.; Haidt, J.; Hood, R.W.; Vago, D.R.; Newberg, A.B. The Varieties of Self-Transcendent Experience. Review of General Psychology 2017, 21, 143–160. [Google Scholar] [CrossRef]
- Navon, D. Forest before Trees: The Precedence of Global Features in Visual Perception. Cognitive Psychology 1977, 9, 353–383. [Google Scholar] [CrossRef]
- Masuda, T.; Nisbett, R.E. Attending Holistically versus Analytically: Comparing the Context Sensitivity of Japanese and Americans. Journal of Personality and Social Psychology 2001, 81, 922–934. [Google Scholar] [CrossRef]
- Jelinek, F.; Mercer, R.L.; Bahl, L.R.; Baker, J.K. Perplexity—a Measure of the Difficulty of Speech Recognition Tasks. The Journal of the Acoustical Society of America 2005, 62, S63. [Google Scholar] [CrossRef]
- Perplexity. Wikipedia, 2024.
- Jurafsky, D.; Martin, J.H. Speech and Language Processing: An Introduction to Natural Language Processing, Computational Linguistics, and Speech Recognition; Prentice Hall, 2009; ISBN 978-0-13-187321-6. [Google Scholar]
- Spadaro, K.C.; Provident, I.M. Health Benefits of Mindful Meditation. In Nutrition, Fitness, and Mindfulness; Uribarri, J., Vassalotti, J.A., Eds.; Springer International Publishing: Cham, 2020; pp. 159–176. ISBN 978-3-030-30891-9. [Google Scholar]
Figure 1.
SEQ Figure \* ARABIC 1: Consciousness as a process of circulating activation. The thick red arrow represents activation circulating in the global workspace, constituting the core resonance. Thin red arrows represent activation spreading into the surrounding halo of associated neural regions. Dotted arrows represent feedbacks, darker color corresponds to more intense activation. The spreading arrows define a prospect of more or less likely potential developments of the core, with intensity proportional to the probability or desirability of the development.
Figure 1.
SEQ Figure \* ARABIC 1: Consciousness as a process of circulating activation. The thick red arrow represents activation circulating in the global workspace, constituting the core resonance. Thin red arrows represent activation spreading into the surrounding halo of associated neural regions. Dotted arrows represent feedbacks, darker color corresponds to more intense activation. The spreading arrows define a prospect of more or less likely potential developments of the core, with intensity proportional to the probability or desirability of the development.

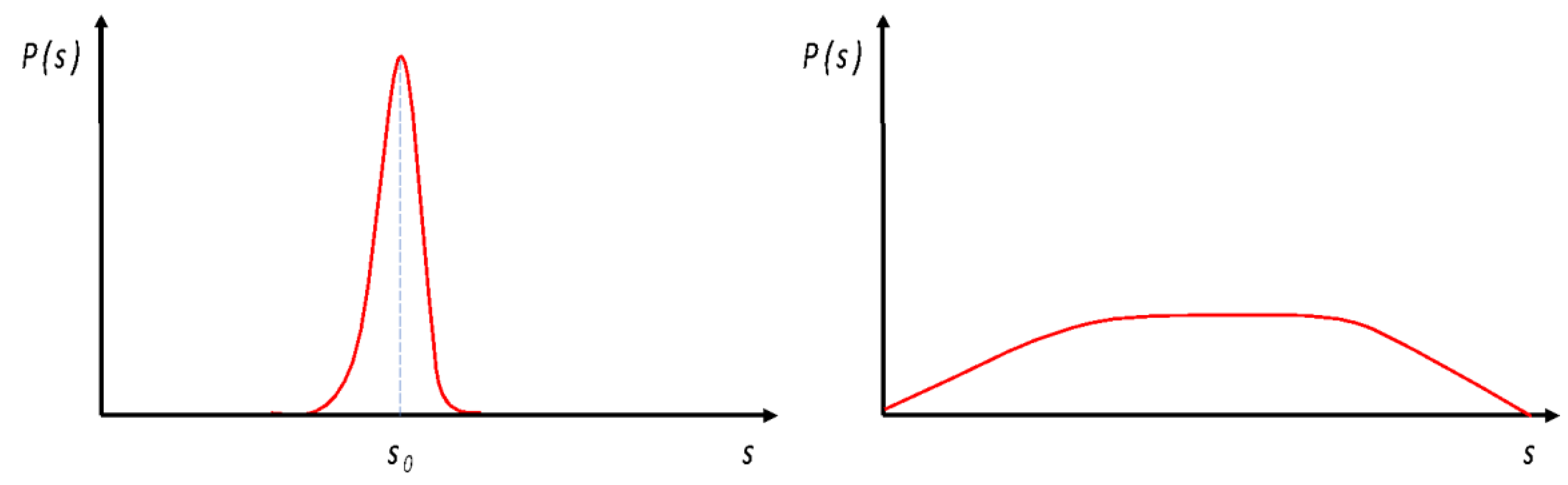
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



