Submitted:
21 November 2024
Posted:
22 November 2024
You are already at the latest version
Abstract
This study aims to predict and fit the nonlinear dynamic grip force of the human upper limb using surface electromyographic (sEMG) signals. The research employs a time series-based neural network- NARX to establish a mapping relationship between the electromyographic signals of the forearm muscle groups and dynamic grip force. Three-channel electromyographic signal acquisition equipment and a grip force sensor were used to record muscle signals and grip force data of the subjects under specific dynamic force conditions. After preprocessing the data, including outlier removal, wavelet denoising, and baseline drift correction, the NARX model was used for fitting analysis. The model compares two different training strategies Regularized Stochastic Gradient Descent (BRSGD)and Conjugate Gradient (CG). The results show that the CG greatly shorten the training time and performance did not decline. NARX demonstrates good accuracy and stability in dynamic grip force prediction, with the model having 10 layers and 20 time delays performing the best. The results demonstrate that the proposed method has potential practical significance for force control applications in smart prosthetics and virtual reality.
Keywords:
1. Introduction
2. Mechanism Analysis of sEMG Signals
2.1. Forearm Muscle Group Distribution
2.2. Noise Source Analysis
- Baseline Drift and Motion Artifacts [15].
- 2.
- System Noise
3. Materials and Methods
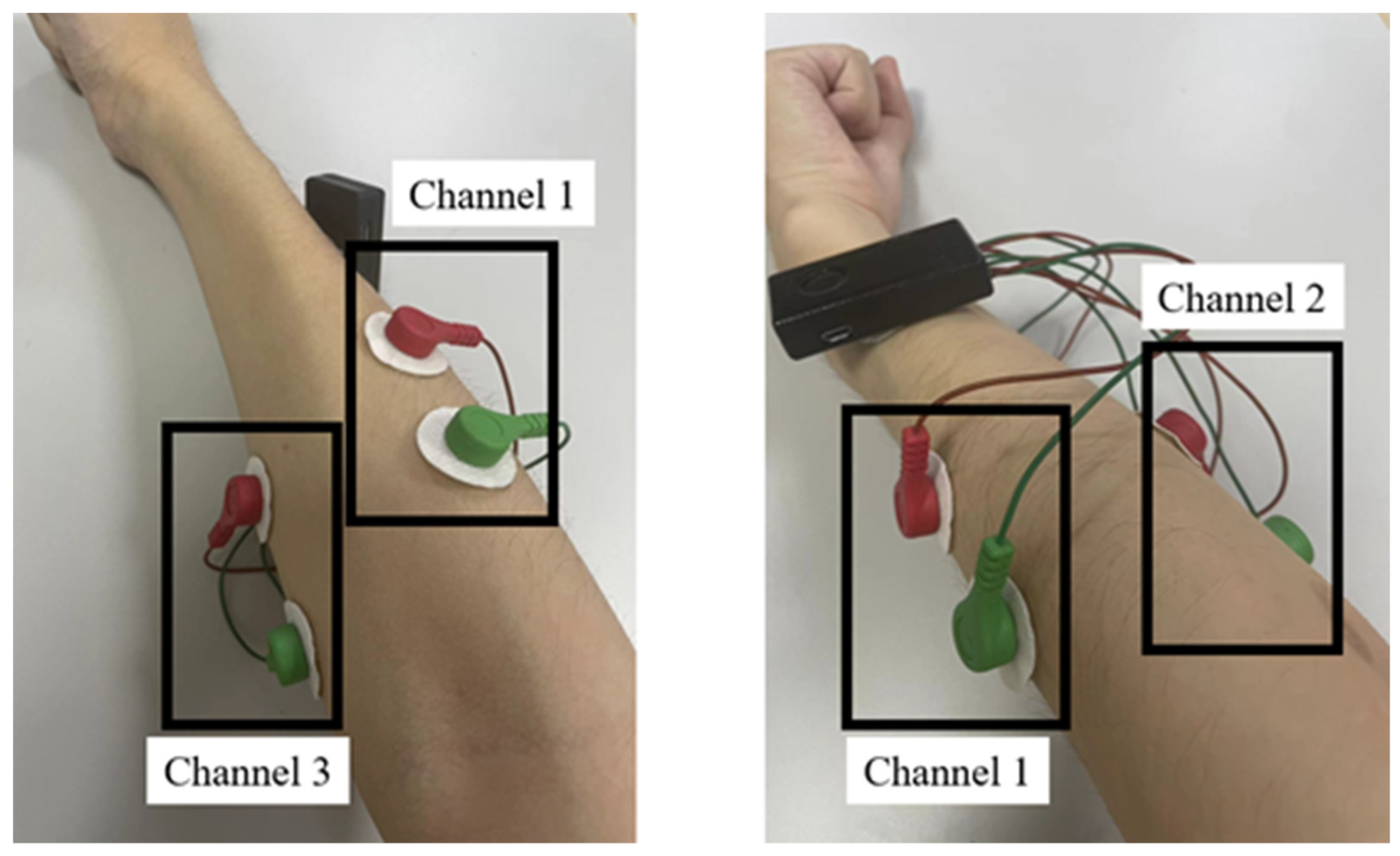
3.1. Experiment Design for Subjects
3.2. Data Preprocessing
3.2.1. Outlier Removal and Filtering
3.2.2. Wavelet Denoising
3.2.3. Removing Motion Artifacts
3.3. Data Fitting and Regression
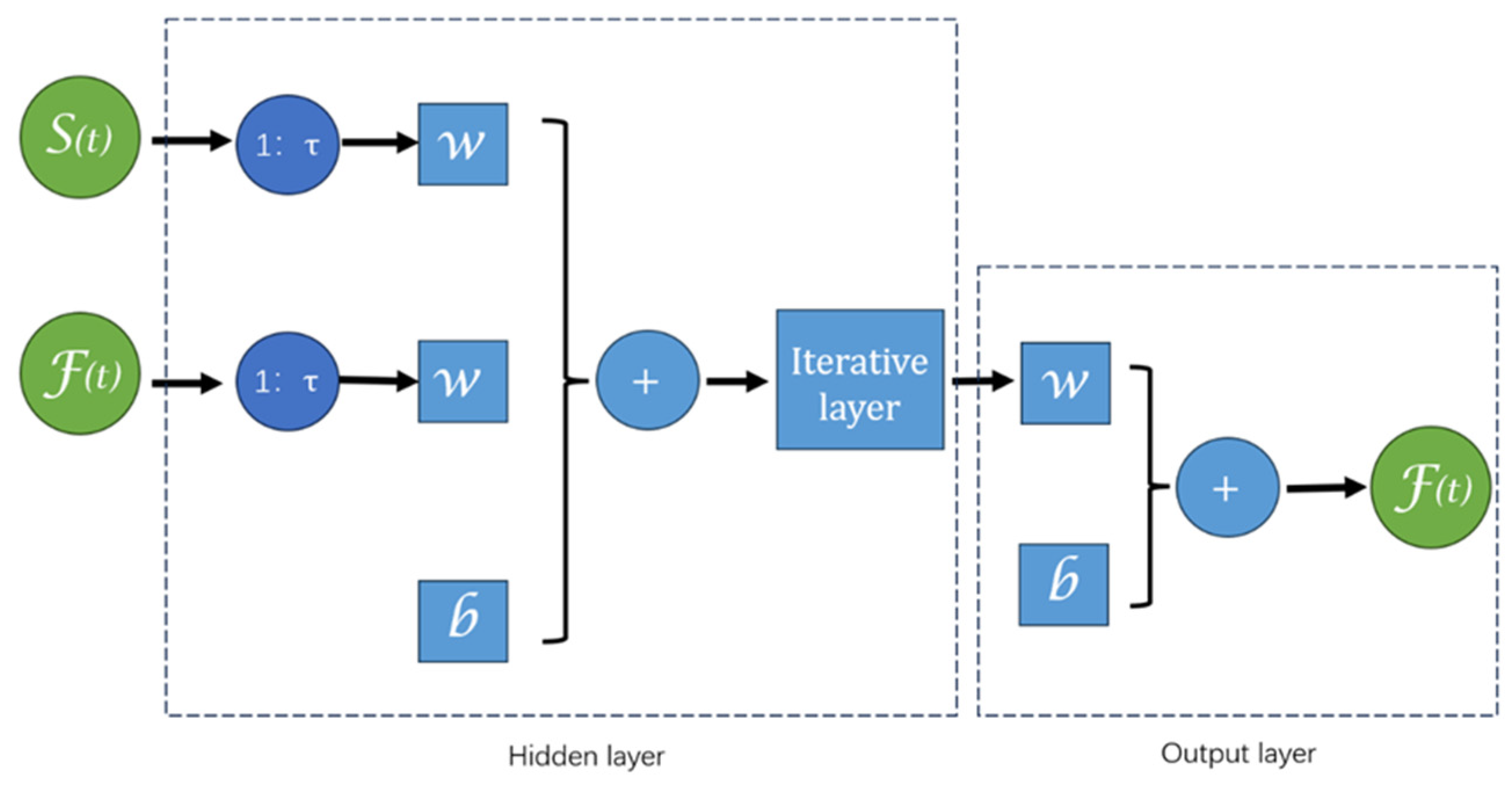
3.3.1. Neural Network Time Series Fitting
3.3.2. Comparison of Different Training Methods
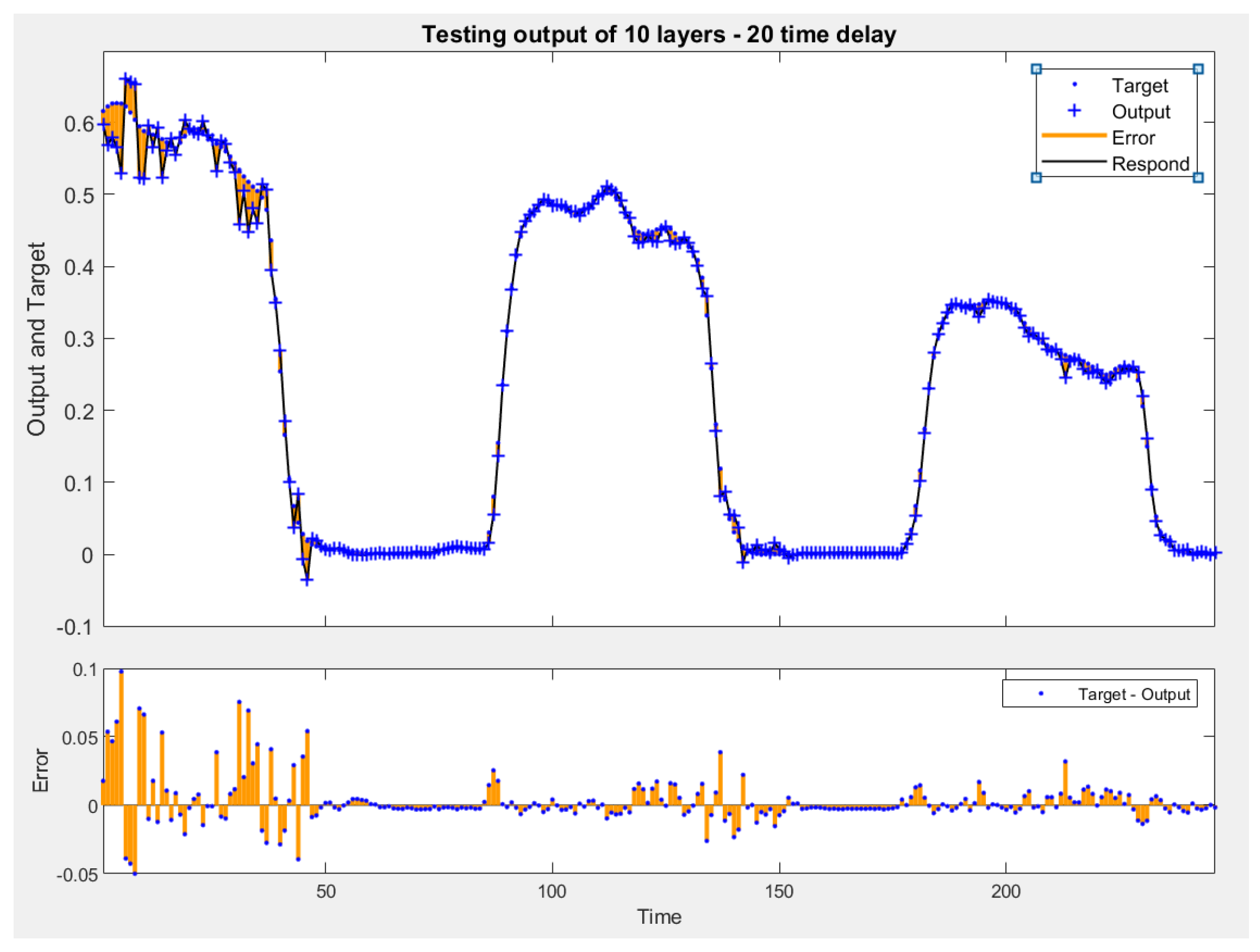
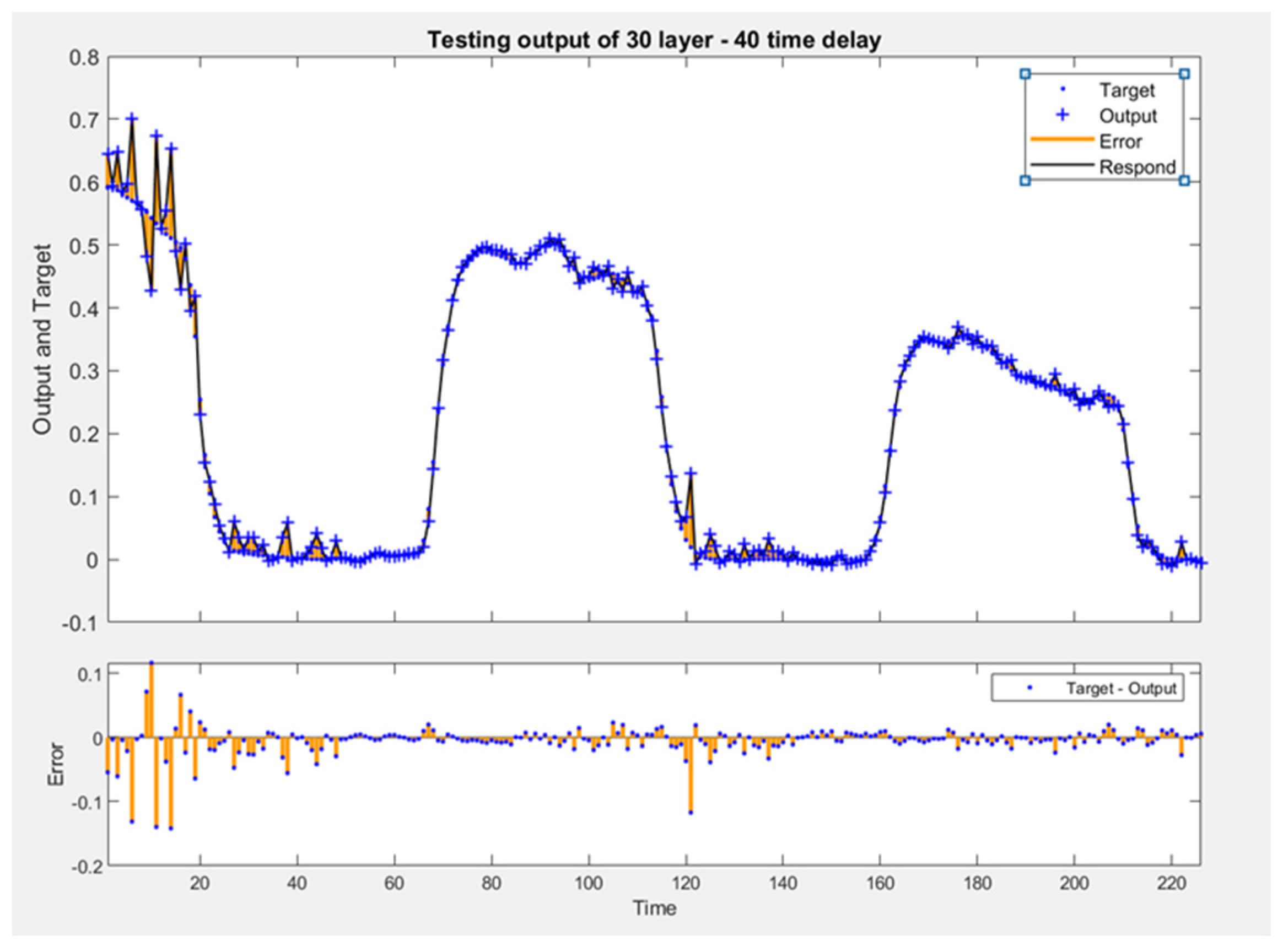
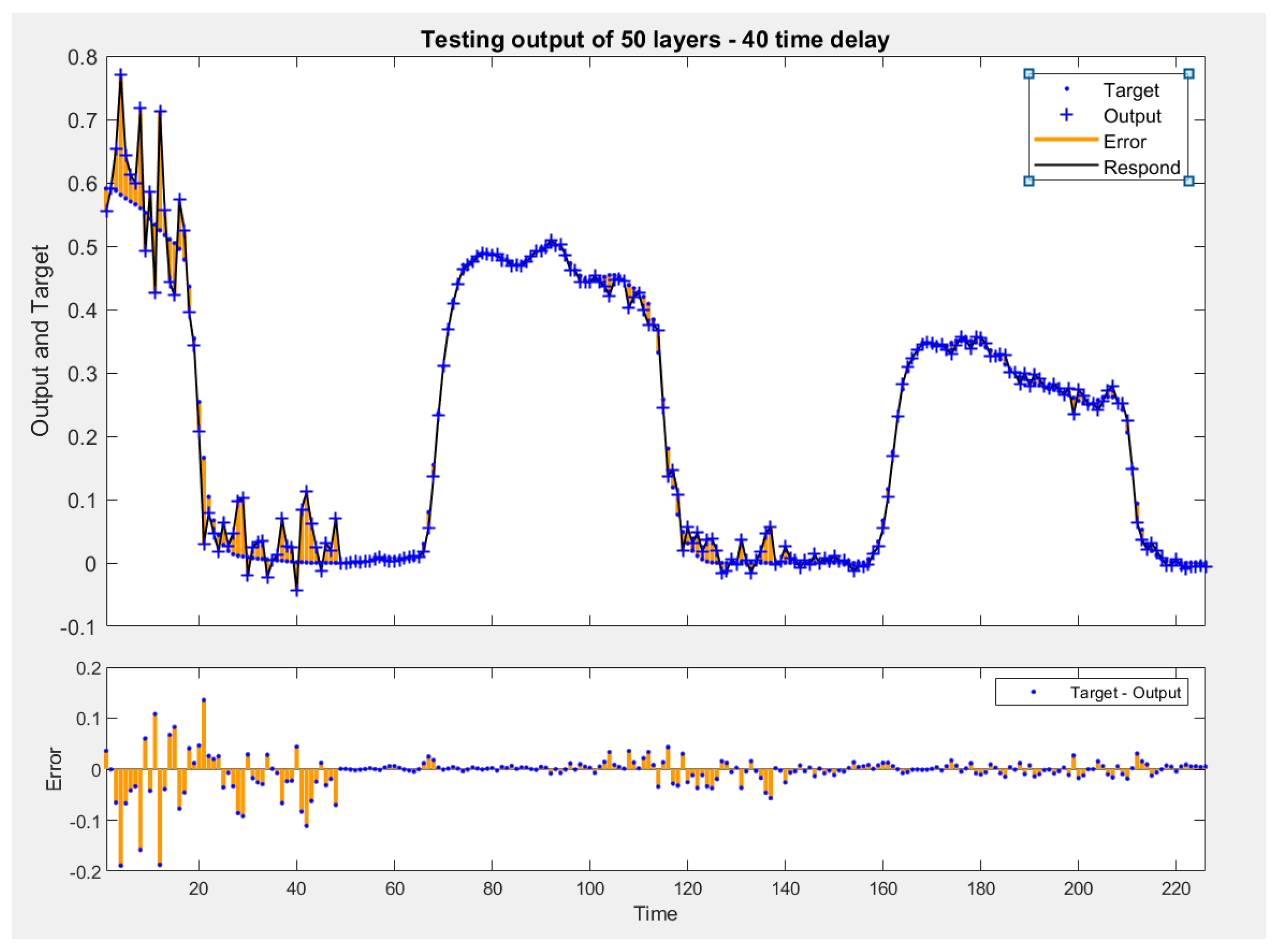
4. Result

| Delay | Number of Neural Network Layers | |||||||||
| 10 | 20 | 30 | 40 | 50 | ||||||
| MSE | R | MSE | R | MSE | R | MSE | R | MSE | R | |
| 10 | 0.35 | 0.9979 | 1.10 | 0.9889 | 1.00 | 0.9901 | 0.34 | 0.9680 | 0.44 | 0.9614 |
| 20 | 0.16 | 0.9986 | 0.44 | 0.9960 | 1.30 | 0.9875 | 1.40 | 0.9865 | 1.40 | 0.9859 |
| 30 | 0.30 | 0.9950 | 0.88 | 0.9903 | 0.89 | 0.9908 | 1.30 | 0.9857 | 2.20 | 0.9764 |
| 40 | 0.95 | 0.9997 | 0.37 | 0.9957 | 2.30 | 0.9769 | 5.10 | 0.9421 | 2.90 | 0.9681 |
| 50 | 0.25 | 0.9966 | 0.49 | 0.9942 | 1.00 | 0.9870 | 1.70 | 0.9800 | 2.50 | 0.9661 |
| Average value | 0.40 | 0.9976 | 0.66 | 0.9930 | 1.30 | 0.9865 | 1.97 | 0.9725 | 1.89 | 0.9716 |
5. Discussion
6. Conclusion
References
- Chowdhury RH, Reaz MBI, Ali MABM, Bakar AAA, Chellappan K, Chang TG. Surface Electromyography Signal Processing and Classification Techniques. Sensors. 2013; 13(9):12431-12466. [CrossRef]
- Young A J, Gannon H, Ferris D P. A biomechanical comparison of proportional electromyography control to biological torque control using a powered hip exoskeleton[J]. Frontiers in Bioengineering and Biotechnology, 2017, 5: 37. [CrossRef]
- Ma R, Zhang L, Li G, et al. Grasping force prediction based on sEMG signals[J].Alexandria Engineering Journal, 2020, 59(3): 1135-1147. [CrossRef]
- McCool P, Petropoulakis L, Soraghan J J, et al. Improved pattern recognition classification accuracy for surface myoelectric signals using spectral enhancement[J]. Biomedical Signal Processing and Control, 2015, 18: 61-68. [CrossRef]
- Ruyi Ma, Leilei Zhang, Gongfa Li, Du Jiang, Shuang Xu, Disi Chen, Grasping force prediction based on sEMG signals[J]. Alexandria Engineering Journal, Volume 59, Issue 3, 2020, Pages 1135-1147, ISSN 1110-0168. [CrossRef]
- N.N. Unanyan, A.A. Belov. Design of upper limb prosthesis using real-time motion detection method based on EMG signal processing[J] Biomed. Signal Process. Control, Volume 70, 2021, 103062, ISSN 1746-8094. [CrossRef]
- Kuiken T, Li G, Lock B, et al. Targeted Muscle Reinnervation for Real-time Myoelectric Control of Multifunctional Artificial Arms[J].Journal of the American Medicine Association(JAMA), 2009,301(6): 619-628. [CrossRef]
- Wang, S., Zheng, J., Zheng, B., & Jiang, X. (2022). Phase-Based Grasp Classification for Prosthetic Hand Control Using sEMG. Biosensors, 12(2), 57. [CrossRef]
- Kim S ,Chung WK, Kim K.SEMG-based static force estimation for human-robot interaction using deep learning[C]//2020 17th International Conference on Ubiquitous Robots (UR).IEEE,2020:81-86. [CrossRef]
- Yansheng Wu, Shili Liang, Tao Yan, Jinxin Ao, Ze Zhou, Xiuping Li, Classification and simulation of process of linear change for grip force at different grip speeds by using supervised learning based on sEMG[J]. Expert Systems with Applications, Volume 206, 2022, 117785, ISSN 0957-4174. [CrossRef]
- Jiang D, Li G, Sun Y, et al. Gesture recognition based on skeletonization algorithm and CNN with ASL database[J]. Multimedia Tools and Applications, 2019, 78(21): 29953-29970. [CrossRef]
- E. Scheme, K. Englehart. Electromyogram dynamical characteristics of sEMG signals of hand grasps via recurrence plot pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use.[J] J. Rehabil. Res. Dev., 48 (6) (2011), pp. 643-659.
- Sharma, T., Sharma, K. P., & Sharma, T. (2024). Identification and Classification of Myoelectric Signal Features Related to Hand Motions. Neurophysiology. [CrossRef]
- Wu Y, Liang S, Yan T, et al. Classification and simulation of process of linear change for grip force at different grip speeds by using supervised learning based on sEMG[J]. Expert Systems with Applications, 2022: 117785. [CrossRef]
- Ruisen Huang, Seong-Woo Woo, and Keum-Shik Hong. 2020. Real-time Motion Artifacts and Low-Frequency Drift Correction for Functional Near-infrared Spectroscopy. In Proceedings of the 2020 12th International Conference on Computer and Automation Engineering (ICCAE 2020). Association for Computing Machinery, New York, NY, USA, 60–64. [CrossRef]
- Chu J U, Moon I, Lee Y J, et al. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control[J].IEEE-ASME Transactions on Mechatronics,2007,12(3):282-290. [CrossRef]
- Vijayvargiya, A., Singh, B., Kumar, R. et al. Human lower limb activity recognition techniques, databases, challenges and its applications using sEMG signal: an overview. Biomed. Eng. Lett. 12, 343–358 (2022). [CrossRef]
- J. Wang, L. Yang, L. Gao and Q. Miao, "Current progress on weak signal detection," 2013 International Conference on Quality, Reliability, Risk, Maintenance, and Safety Engineering (QR2MSE), Chengdu, China, 2013, pp. 1812-1818. [CrossRef]
- Scheme, E., & Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use[J], 2011, 48(6): 643-659.
- Kadochnikova, Y. Zhu, Z. -Q. Lang and V. Kadirkamanathan, "Integrated Identification of the Nonlinear Autoregressive Models With Exogenous Inputs (NARX) for Engineering Systems Design," in IEEE Transactions on Control Systems Technology, vol. 31, no. 1, pp. 394-401, Jan. 2023. [CrossRef]
- Tam T. Truong, Jay Airao, Faramarz Hojati, Charlotte F. Ilvig, Bahman Azarhoushang, Panagiotis Karras, Ramin Aghababaei, Data-driven prediction of tool wear using Bayesian regularized artificial neural networks, [J] Measurement. Volume 238 , Issue . 2024. PP 115303-115303. [CrossRef]
- Nazareth, J. L. (2009). Conjugate gradient method. WIREs Computational Statistics, 1(3), 348-353. [CrossRef]
- J. R. Suganthi and K. Rajeswari, "Evaluation of Muscle Fatigue based on SEMG using Deep Learning Techniques," 2023 5th International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 2023, pp. 01-06. [CrossRef]
- Beck, Travis W.; Stock, Matt S.; DeFreitas, Jason M.. Time-Frequency Analysis of Surface Electromyographic Signals During Fatiguing Isokinetic Muscle Actions. Journal of Strength and Conditioning Research 26(7):p 1904-1914, July 2012. [CrossRef]
| Training Method | MSE | Regression Value | Training Time for 1000 Epochs |
| BRSGD | 0.0013 | 0.9878 | 47m59s |
| CG | 0.0016 | 0.9839 | 5s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



