
Submitted:
12 June 2024
Posted:
13 June 2024
You are already at the latest version
Abstract
To encourage proper waste management from electrical and electronic devices (e-waste), it is necessary to invest heavily in the development of recycling technologies. One way to improve the process is to automate separating the shredded parts of e-waste using a robot. This paper's literature review, utilizing the Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) framework, showcases potential robotic technologies for e-waste separation. However, the intricate design of these devices can pose significant challenges in their implementation. Various legal, organizational, and sociological obstacles have left Serbia's e-waste management practice underdeveloped, resulting in an unsatisfactory recycling rate. In this paper we examined the possibility of using robots on the precise example of recycling refrigerators in a recycling center in Eastern Serbia, concluding that such a solution would have multiple positive effects, both on the employees and the working environment, on the operations of the recycling center itself, and on increasing the e-waste recycling rate in the country.
Keywords:
recycling
; e-waste
; robot
; waste separation
; circular economy
1. Introduction
According to the hierarchy of waste management, landfilling is the least desirable option, and the basic goal of every society is to find the same or a new purpose for waste if it cannot avoid its generation [1]. The prevention of waste generation is the responsibility of the manufacturer of any product, and a zero-waste industry is, conditionally speaking, only the food industry. All other industries, with the mining industry leading the way, produce significant amounts of waste, surpassing the number of useful products by up to nine times [2]. More and more efforts are being made to repurpose waste, which, based on extensive legal regulations, provides a new prism through which waste is viewed, so it can be renamed into the so-called "by-product" or "matter that does not have the status of waste," which results in a smaller amount of waste that is forever disposed of in landfills [3]. According to the Waste Management Program in the Republic of Serbia for the period 2022–2031, as stated in the "Official Gazette of the Republic of Serbia," no. 30/18, one of the goals is to reduce environmental pollution by reducing the amount of waste and developing a circular economy [4]. The circular economy promotes the idea that the production of products is aligned with the further use value of the waste generated after the consumption of the product; that is, the waste is constantly finding new use value [5].
The management of waste from electrical and electronic equipment (e-waste) represents a significant challenge and an obstacle to Serbia's implementation of the circular economy. Rapid technological development and advancement are rendering current electronic and electrical equipment rapidly obsolete, leading to the generation of large amounts of waste. E-waste consists of various household waste devices, such as large and small household appliances, IT equipment, consumer goods for leisure, lighting equipment, electrical and electronic appliances, toys and sports equipment, medical aids, vending machines, monitoring and supervision instruments, etc. [2]. This waste initially falls under municipal waste and makes up 5.7% of the average morphological composition of mixed municipal waste in the Republic of Serbia (Program, 2022). In the Waste Catalog, this waste is classified into two groups [7]:
- Group/subgroup 16 02: waste not otherwise specified in the catalog/waste from electrical and electronic equipment: of the 8 listed types of this kind of waste, as many as 6 are marked as hazardous waste, and
- Group/subgroup 20 01: municipal waste (domestic waste and similar comme0rcial industrial waste), including separately collected fractions (exception 15 01) - where 14 hazardous wastes are located with emphasis on discarded electronic and electrical equipment containing hazardous components.
Therefore, we can conclude that most e-waste possesses hazardous waste characteristics and requires special management. This waste may contain a large number of hazardous elements, such as heavy metals, brominated flame retardants, chlorofluorocarbons, etc. [8]. As the Law on Waste Management requires ("Official Gazette of the Republic of Serbia" no. 36/2009, 88/2010, 14/2016, 95/2018 – other law, and 35/2023), this waste must not be mixed with other waste. The disposal of this waste is prohibited without prior treatment, and records of waste quantities and recyclable components are mandatory. This waste is managed by special waste flows, and special measures are in place for collection, transport, storage, treatment, reuse, and disposal. [9]. Against these facts, e-waste represents a rich source of resources that can be reused and recycled. The recycling of e-waste has spawned a new industry trend popularly referred to as "urban mining" [10]. There is even 100 times more gold in 1 ton of smartphones than in 1 ton of gold ore, while in 1 ton of motherboards, there is up to 800 times more gold than in 1 ton of gold ore [11]. According to estimates, recycling all of the world's e-waste could meet up to 95% of the global needs for as many as 60 metals, including copper, gold, silver, and platinum [12,13]. Despite these facts, only 17.4% of this waste is fully recycled globally [14].
- collection - carried out at the place of origin,
- sorting - involves sorting according to the categories of waste from electrical and electronic devices, and can be performed at the household level, at the local community level, at the landfill, or at recycling centers.
- separation - includes shredding, separation of recyclable from non-recyclable parts, and separation of useful components by one of the usual separation methods. The final quality of the recyclate depends on the efficiency of this step,
- final processing - involves the processing of previously separated recyclable materials by hydrometallurgical or pyrometallurgical process, and
- disposal of non-recyclable parts of e-waste.
In order to encourage the development of the circular economy and recycling, it is most expedient to influence the key step, which is the separation of e-waste. Waste separation has numerous positive effects, with the most important one standing out [17].
- reducing the amount of waste,
- extending the exploitation life of the landfill,
- controlled management of hazardous waste, which is separated from nonhazardous waste in a timely manner by proper sorting,
- increasing the efficiency of recycling, and
- overall environmental protection.
Separation of waste can be done manually or automated, whereby automation can be direct or indirect [18]. Manual separation of waste is based on macroscopically observable differences between recyclable waste components. Direct automated separation techniques are based on concentration methods that primarily originate from mining and use the preparation of mineral raw materials, such as gravity, magnetic, electric, and flotation concentration [19,20]. Indirectly automated separation is based on the use of artificial intelligence and sensors to recognize certain types of waste [21]. "Macro sorting" refers to the separation of components, items, and packaging from the waste without any special pretreatment. "Micro sorting" occurs when the waste undergoes prior shredding to enhance its surface area relative to its volume [22].
Of all the listed techniques, manual separation is considered the most precise, but not the most efficient, given the high risk of injury and high labor costs [23]. Manual separation is twice as cheap as automated separation, but automated separation can pay for itself three times faster than manual separation [24]. With the rapid advancement of technology and the emergence of innovative technological solutions, an automated technique for efficient waste separation has emerged, involving the use of robots. The integration of robots into the e-waste management system is a significant step towards achieving the goals of the circular economy, and some of the benefits of switching from a manual to a robotic waste separation system are numerous, including the reduction of illnesses and injuries at work, the acceleration of the separation process, the reduction of costs, increasing recycling efficiency, the long working life of robots, and so on [25].
The aim of this paper is to:
- review the waste separation technologies using robots through a systematic review of current works,
- analyze the existing practice of e-waste management in the Republic of Serbia with reference to problems and potential solutions, and
- 3. examine the possibility of using robots in the e-waste separation process in Serbia on the specific example of the "E-Reciklaža" recycling center in Niš, Serbia.
2. Review of Works Dealing with the Application of Robots in Waste Separation
2.1. Selection of Papers
The Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) protocol was used for the preparation of the literature review of this paper [26]. The papers were collected from the Scopus and Web of Science databases. Both sources were searched separately. When searching for papers, the keywords "e-waste,""robots," and "artificial intelligence" were used in different combinations with the help of Boolean operators "AND", "OR" and "NOT". Filters such as "full-text only" and "English language" were applied. Only papers published in a journal or at a conference were included. In the PRISMA diagram, the number of publications for each database is entered individually, as well as is the total number of papers obtained after applying all criteria in the left cell at the top of the diagram (Figure 1).
Following the PRISMA protocol, we eliminated duplicate publications in the next step and collected the remaining publications from the Scopus and Web of Science databases. Next, we excluded works that were not available and those that, upon reviewing the title and abstract, did not align with the research objective. After reading the remaining papers, out of the initial 412, only 10 papers were included in the literature review. Table 1 shows insights from the selected papers.
2.2. The Major Findings of the Selected Papers
Unlike classic production facilities, recycling facilities operate without production deadlines, instead processing all waste according to a combination of additional financial and technical criteria. When recycling, you should take into account the waste that is in the recycling plant, the space it occupies, as well as the composition of the components from which it is made, because they directly affect the value of the recycled raw material and can dictate what will be recycled from the collected waste. This indicates that the recycling process, and therefore the separation process, is a non-uniform and complex task that is currently impossible for complete automation.
A typical example of the automation of the waste separation process is based on the combination of a robot and a vision system in a recycling plant [27]. One of the possible approaches when it comes to the automation of recycling with the help of robots is the application of a hybrid approach, where humans can be included in the automated process and can add additional quality to their cognitive abilities [28]. There are already commercially available robotic recycling solutions on the market, that can sort different materials from waste, such as ZenRobotics, SamurAI robot, Max-AI AQC, and installed Liam robot systems developed by Apple to disassemble their devices [13,29].
Robotic waste separation systems can be divided into two main subsystems that affect the separation process and success [27]:
Vision systems and artificial intelligence algorithms.
Robotic systems with grippers.
Vision systems and the application of machine learning and artificial intelligence aim to recognize an item to be recycled from the waste process [30,31,32]. Recognition is done by applying algorithms, that are trained on a training set to recognize and classify a specific type of waste or element. The success of detecting recycling objects depends on the performance of the vision system, algorithms and training set. Certain databases are available for training recognition algorithms that also contain e-waste data, but as e-waste is very diverse, often the database of one case cannot be generalized and applied to others [27,30,33].
Sensors: most commonly cameras and/or optical sensors.
Image processing hardware: consists of processors (e.g. microprocessors, Digital Signal Processor (DSP) and Field Programmable Gate Array (FPGA)) that enable fast processing of captured images and memory that serves to temporarily store data during image processing.
Image processing software, which can be separated into two parts:
a) Image analysis algorithms that include algorithms for filtering, segmentation, pattern recognition, classification, and other visual data processing;
b) Machine learning and artificial intelligence, where algorithms are developed that use deep learning techniques to recognize and interpret complex visual patterns.
There are multiple reasons that make the application of computer vision in e-waste recycling highly desirable, such as [31]: reduction of overall recycling costs, speeding up the process, easier process control, centralized database, real-time information, quality control, high precision, etc.
A robot system with grippers assigns the robot the task of selecting an item for recycling, sorting it, and disassembling it, either independently or with human assistance. The robotic system's performance influences the speed and precision of the separation process, while the gripper selection determines the reliability of grasping the object. The choice of grippers is large and depends on the shape and dimensions of the object being recycled (e.g., two-finger, vacuum, multi-finger, or usage of multiple grippers) [27].
The development of new technologies, like the collaborative robot, holds significant potential for use in recycling and waste separation, leveraging the cooperation between humans and robots, a concept known as human-robot collaboration (HRC). HRC makes it possible to use the strength, precision, and speed of the robot, while on the other hand, humans can contribute with cognitive abilities that the robot cannot fully replicate (e.g., skills, experience, creativity, etc.) [28,34,35].
According to Ramaduarai et al. [34] it was established that the speed of recycling and the success of catching objects increase depending on the level of human involvement in the waste separation process, and that recycling is globally faster than when only a human or a robot work independently. Human involvement can be divided into three levels, where each level of involvement implies previous levels [34]:
- Level 1: Occlusion removal – removing objects that overlap other objects makes it easier for the vision system to recognize objects and capture them later.
- Level 2: Optimal distance – moving the object to allow enough space for the robot's gripper to grasp the object.
- Level 3: Optimum Grasping Position – placing the item to be sorted in a position that is ideal for grasping by the robot.
3. E-Waste Management in Serbia - Current Situation
In Serbia, there is still no systematically organized separate collection and sorting of e-waste, where e-waste should be collected under the supervision of local communities as special waste processes. However, the practice is such that the organized collection of this waste occurs only sporadically [4]. Given that e-waste can have the character of hazardous waste, it should be disposed of either in hazardous waste landfills or neutralized before disposal. Contrary to these facts, this waste most often ends up in municipal waste landfills, together with other waste [36]. During 2022, according to data from the Serbian Environmental Protection Agency, 22,571,038 electrical and electronic waste, or 20,226.6 tons, reached the market. In the same year, the reuse of 30,316 tons of e-waste was recorded, while 3,451 tons of separated components from this waste were exported; of which 2,574 tons have the character of hazardous waste [37]. Based on reported data, it is estimated that the average amount of collected e-waste is 6.3 kg/inhabitant annually, which is unsatisfactory. There are estimates that 15,000 tons of this waste will be collected in 2024, that is, 38,000 tons in 2031 in Serbia [4].
There are about 500 operators licensed to collect e-waste in Serbia, and the collection is based on the selective collection of profitable waste. In Serbia, only 5 operators engage in e-waste recycling, 13 operators focus on reuse, 10 operators handle hazardous waste treatment, and 89 operators handle non-hazardous waste from electrical and electronic equipment. Not a single operator in the entire territory of Serbia deals with e-waste disposal [4]. Only in the territory of Belgrade, the largest city in Serbia, are there 58 operators who collect e-waste, while 42 operators, in addition to collection, have storage permits. 34 operators deal with e-waste treatment [38]. According to the interactive map "Where to Recycle," which represents a common social good and provides information on all available collection and recycling centers for all types of waste in Serbia, it can be counted that there are as many as 14 recycling centers that collect and/or treat e-waste [39]. Figure 2 shows the approximate schedule of collection and recycling centers for this waste in Serbia.
In all recycling centers, manual sorting of e-waste according to classes and manual disassembly of macro-components are carried out with the eventual application of magnetic separators for separating ferrous metals and Eddy current devices for separating non-ferrous metals. No center has even considered the use of robots in the separation of e-waste [40].
3.1. Obstacles and Potential Solutions in the e-Waste Management System in Serbia
In 2022, the recorded municipal waste recycling rate in Serbia was 17.7%, which also includes e-waste recycling [41]. Contradictory information indicates that one of the national goals as of 2019 was an e-waste recycling rate of 50–75%, depending on the e-waste category [6]. Clearly, we are not even close to meeting this goal. The reasons for this state of affairs are multiple and can be defined through legal, organizational, and sociological obstacles.
3.1.1. Legal Obstacles
From a legal point of view, a major problem is the inconsistency of the legislation governing e-waste management in Serbia with the legislation of the European Union (EU). According to data from 2021, each EU resident collected an average of 11 kg of e-waste, and the EU recycled nearly 40% of this waste, clearly indicating Serbia's significant lag [42]. The European Directive 2012/19/EU, the umbrella law for regulating the conditions of e-waste management at the EU level, has not updated the national legislation concerning waste management. The umbrella law that regulates waste management in the Republic of Serbia is the Law on Waste Management („Official Gazette of the Republic of Serbia", no. 36/2009, 88/2010, 14/2016, 95/2018 - other law and 35/2023) [9], while the umbrella legal act regulating the management of waste from electrical and electronic devices is the Rulebook on the list of electrical and electronic products, measures prohibiting and limiting the use of electrical and electronic equipment containing hazardous substances, methods and procedures for managing waste from electrical and electronic products („Official Gazette of the Republic of Serbia “, no. 99/2010) [7].
- Absence of a legal framework for the establishment of collective and individual schemes according to the principle of waste management, "producer responsibility" in Serbian legal acts, as prescribed by Article 5 of Directive 2012/19/EU.
- Absence of a legal framework for establishing a National Register for manufacturers or importers of electrical and electronic equipment in Serbian legal acts, as prescribed by Article 16 of Directive 2012/19/EU.
- Absence of prescribed obligations of separate collection, treatment, reuse and disposal of e-waste in Serbian legal acts, as provided for in Articles 5, 12 and 13 of Directive 2012/19/EU.
- Absence of a prescribed financial guarantee by the manufacturer or importer of electrical and electronic equipment that they will finance the responsible management of e-waste in Serbian legal acts, as prescribed in Article 12 of Directive 2012/19/EU.
- Inconsistency of prescribed national goals for the collection and recycling of e-waste with European goals, prescribed by Article 7 of Directive 2012/19/EU. Moreover, Serbian legal acts do not define who is in charge of implementing the goals.
Given that Serbia has been a candidate country for EU accession since 2004, a deadline for harmonizing national regulations with European goals concerning e-waste has been established until January 1, 2022 [46]. Apparently, that deadline was not met.
3.1.2. Organizational Obstacles
The infrastructure for e-waste management at the state level practically does not exist, and the motivation for e-waste recycling depends to a large extent on the will of a few private companies that deal with it for personal gain [47]. At the moment, communal services typically collect e-waste along with other bulky waste because there is neither a system in place for the separate collection of this waste from households nor locations for its collection at the local community level [48,49]. There are only collection companies dealing with targeted collection of this waste, and there are 15 of them nationwide [39]. These companies are located in urban areas, while there are none in rural areas [40]. The return of waste electrical and electronic equipment from retail establishments is only partially carried out, while these same retail establishments do not offer the service of accepting this waste from citizens [45]. This is because those who collect this waste should have a storage permit according to the Law on Waste Management, and currently only companies dealing with the collection and recycling of e-waste in Serbia have it [50]. Practice has shown that even the companies involved in the recycling of e-waste in Serbia are not sufficiently motivated to collect waste directly from households, but do so through occasional environmental campaigns [51]. Currently, the most efficient collection of e-waste in Serbia is carried out through organized collection actions initiated by the recyclers themselves, which include bringing the waste to a specified location or their arrival at the home address. The biggest problem in the entire e-waste management system is illegal flows, which make monitoring the situation in Serbia and statistical analysis difficult [39,52]. The lack of professional staff for e-waste management in the relevant institutions has been a problem for years. This begins with the Ministry of Environmental Protection, where additional staff is required to handle the implementation of legal and strategic acts. This extends to the inspection supervision sector, which oversees the performance of activities within the framework of e-waste management, and the Serbian Environmental Protection Agency, which is responsible for [45]. Due to the lack of specialized software for monitoring waste flow, operators in Serbia improvise their e-waste reporting methods, primarily using various accounting programs or Microsoft Excel [53]. The root of these problems lies, to the greatest extent, in high investment costs and the absence of state support. Landfill fees are generally low, making e-waste treatment and recycling operations a priori expensive. Therefore, there has been minimal investment in the development of e-waste separation technologies thus far.
3.1.3. Sociological Obstacles
Sorting all waste, including e-waste, at the household level is almost nonexistent in the Republic of Serbia. This is because this kind of habit and education were absent. Serbia, a country in transition with a low standard of living and a constant tendency toward economic development, does not prioritize environmental protection, as evidenced by the absence of environmental awareness and concern. Environmental awareness develops from a young age and the support of the family and then of educational institutions is needed first, so that pro-ecological habits can become established and become part of “education at home“[54]. According to research on Serbian citizens in 2022, only a fifth of citizens have sufficient knowledge about how to sort waste [55]. In general, the urban population in Serbia, which is supposed to have the most developed environmental awareness among all citizens, has only partial ecological knowledge [56]. Research has shown that the habit of young people in Serbia is to dispose of e-waste without any order, together with other waste or in places that are not even intended for waste disposal, in direct connection with the fact that there are no planned places for e-waste disposal [57]. The citizens of Serbia are not adequately informed about what e-waste is, how to manage it, the benefits of its recycling, as well as the consequences of its improper disposal [58].
3.1.4. Potential Solutions to the Problem
According to the previously exposed problems, the proposed solution primarily involves increasing state support to strengthen the entire e-waste management mechanism. Declarative support alone is insufficient; therefore, financial support for research is also necessary. According to the National Program for the Integration of Serbia into the EU, the process of European integration is based primarily on the transfer and application of EU legislation into the national legislation, the establishment of administrative and institutional capacities with the aim of effective application of European regulations, and the provision of financial and economic instruments [59].
In this regard, the key factors of the improvement mechanism of the e-waste management system would be the following:
- Improving and harmonizing legal acts with European ones, which would make e-waste management strictly controlled;
- Harmonizing e-waste recycling goals with European ones and intensive engagement in their fulfillment;
- Increasing environmental awareness among citizens of Serbia, through constant education and the implementation of a targeted campaign through the media;
- Incorporating the private sector into the e-waste management system, in order to influence the system from the production of electrical and electronic devices, by incorporating recyclable materials, building recycling facilities and financial motivation by the state;
- Supporting research activities in the field of development of innovative e-waste separation technologies, and
- Improving the infrastructure for e-waste management through the provision of all necessary facilities for the collection, transport, and recycling of e-waste.
One of the most effective elements of the previously described mechanism for improving the e-waste management system is the last one: providing the necessary infrastructure for e-waste management. Only concrete action on this element, specifically the automation of the waste separation process using robots, can achieve the set goals of e-waste recycling [60]. Separation of e-waste using robots can primarily be applied in waste recycling plants as a secondary separation line. One of the goals of the Waste Management Program in Serbia is to achieve a 45% e-waste collection rate by 2031 and to establish recycling yards throughout the country, within each municipality, that will be able to accept special waste flows, such as e-waste, while facilities for disassembly and sorting will be established at the regional level. Construction of a secondary separation plant is planned in each regional center [4]. This measure is a good basis for the implementation of automated separation of e-waste using robots.
4. Case Study: The possibility of Using Robots in e-Waste Separation in the "E-Reciklaža" Recycling Plant, Niš, Serbia
E-waste is very demanding and difficult to separate due to its complex construction [61]. Different manufacturing methods characterize televisions and refrigerators, or telephones and microwave ovens, although their composition is similar. It is especially challenging when the devices are bulky and difficult to manipulate, because then it is necessary to apply mechanical force to shred them. This results in chipped parts of irregular shape and sharp edges that are difficult to detect and manipulate. For these reasons, a unique template cannot be applied when separating e-waste, nor can the separation process be fully automated [31,62]. In this paper, the possibility of separating refrigerators using a robot was investigated on the concrete example of the recycling center "E-Reciklaža," which is located in Eastern Serbia, in Niš. Since 2010, "E-Reciklaža" has been one of the leading companies in the field of e-waste recycling in the Balkans. The company's main activity is collecting, transporting, storing, and treating e-waste [63].
4.1. Description of the Refrigerator Recycling Procedure in the Recycling Facility "E-Reciklaža“
Machine recycling of refrigerators is done in seven steps, as shown in Figure 3 [64]. The first step involves delivering the material for recycling to the „Querstromzerspaner“ (QZ) disintegration device, which has several modes of operation depending on the type of e-waste being recycled. The second step involves preparing the refrigerator by manually removing rubber, wood, glass, styrofoam, cables, and any remaining organic materials. In the third step, gas is extracted from the refrigerator (chloro-fluoro-carbon and hydro-chloro-fluoro-carbon) from the refrigerator, the compressor is removed and placed on a specially prepared surface a place for squeezing oil into receiving reservoirs, from which the oil is poured into metal barrels via a pump. The prepared refrigerator is introduced into the QZ device via the input conveyor. In the fifth step, the input material is crushed and ground with a powerful engine that drives massive chains. In the sixth step, the components are separated into: 1) ferromagnetic materials, 2) non-ferrous metals and plastics, and 3) polyurethane foam. Ferromagnetic materials are separated using an ascending conveyor and a magnetic separator. The non-magnetic residue is transported to the "Eddy Current" device, where non-ferrous metals such as copper and aluminum are separated from other parts, i.e. plastic. It can occur that the fractions recycled separated in this way are not completely clean, so the operator needs to manually remove the remains of plastic from the shredded metal in order to improve the purity of the fractions. This procedure contributes to the recycling process's efficiency by reducing waste and optimizing resource usage. Screw conveyors transfer the material to the "screen machine" after 240 seconds of treatment. The "screen machine" separates the polyurethane foam from the remaining material at this point. Special "matrices" help treat the polyurethane foam further at a high temperature of 120 °C, ensuring the complete extraction of freon, a crucial step for cleanliness.
4.2. Identification of the Steps of the Recycling Process Suitable for Automation/Robotization
According to Section 4.1, the separation of components, the sixth step in recycling, is best suited for automation and robotization. This step involves "pick-and-place" and manual sorting, currently carried out by 2-4 workers per shift (Figure 4). The characteristics of that workplace are characterized by "short burst method of working" during which the workers work at a faster pace, while they typically operate at a slower pace. Recyclable samples arriving on the conveyor belt can be of different sizes and shapes, as shown in Figure 4(b), which presents a challenge in terms of capture. Moreover, some parts may contain plastic elements, which visually complicate the task of visual recognition based on colors. The workplace itself is standing and quite non-ergonomic, with a high risk of musculoskeletal back injuries due to bending.
4.3. Technical Requirements Analysis and Proposed Solution
A typical robotic waste separation setup that can be considered in this case, depicted in Figure 5, comprises a pick-and-place mechanism functioning on a conveyor. Guided by a vision system equipped with one or more cameras and specialized algorithms, the robot identifies image content, locates items, and carries out picking tasks. The effectiveness of waste separation systems heavily relies on the computer vision algorithms' ability to recognize diverse waste types and the robustness of grippers handling a wide range of objects [65,66,67]. For the purposes of this paper, various approaches may be considered, including color, shape, and volume analysis of detected samples, regarding the possible grippers that may be considered.
As mentioned earlier, the conveyor output is not consistent in volume due to the discrete nature of the QZ device input. As a result, the output conveyor's uneven distribution of material in a single layer presents challenges for both machine vision and object picking operations. One possible solution to a given situation is the introduction of a set of rotary brushes moving in the opposite direction from the conveyor, as well as a vibrating section of the conveyor to ensure an even, single-layer distribution.
The following analysis of the hardware requirements for the picking operation performed by the robot relies on the statistical data gathered from the process of recycling refrigerators. In the particular analyzed case, the QZ device outputs up to 20 t per 8-hour shift, and up to 5% of the output is a mix of non-ferrous metals. Within the mix, at least 85% is aluminum, which leaves up to 15% of material that needs to be extracted from the conveyor. The observed sample had an average weight of 5,14 g, accounting for 98% of the total mass of pieces that required extraction, with the largest overall sizes ranging from 5 mm to 50 mm [64]. According to the sample's statistics, there are typically 1.013 pieces to pick every second or one piece every 0.9869 seconds. Because the pieces' depositing positions are less than 300 mm away from the furthest picking position, different robots in delta or SCARA configurations can be used. Given that orientation doesn't matter when picking or depositing the pieces, and considering the plant's spatial requirements, we selected a delta robot configuration for further analysis, as this configuration typically achieves the 0.3 seconds standard cycle time that most robot manufacturers claim [68].
The choice of an appropriate gripper, capable of handling a wide variety of shapes and sizes of pieces, is the challenging physical aspect of the separation process. The QZ machine's shredding process often results in numerous pieces with folds, creases, and twists. The required gripper activation and deactivation time, varying thickness, and possibility of deformation imply that the choice of mechanical and pneumatic grippers with rigid fingers is not a good one. The same applies to electromagnetic grippers, given the non-ferrous nature of the observed metals; the same applies for the electromagnetic grippers. One possible solution is to use suction grippers with highly flexible lips or vacuum sponge suction cups, which have the ability to conform to the irregular shapes of the pieces. However, to account for the presence of pur-powder, combine these with adequate air filtration or periodic automatic blow-outs.
In summary, the proposed solution consists of the camera vision system, which recognizes individual non-aluminum pieces on the conveyor belt and forwards their coordinates to the robot. The delta configuration robot placed on a portal over the conveyor, picks up individual pieces and deposits them into corresponding bins using suction grippers with adequate filtering and cleaning subsystems. Safety fencing encloses the solution and integrates it with adequate safety interlocks and systems to prevent human injury.
The introduction of a highly conservative estimate suggests that the picking and depositing cycle, including gripper activation and deactivation, would take 0.45 seconds to execute, which is 50% more than the standard cycle time for similar movement. This estimate still leaves potential to double the production output using the same hardware, or to account for other uncertainties and periodic gripper cleaning. The QZ machine dictates the total production output, so the introduction of the robotized solution for non-ferrous metals does not directly affect it, but it does create room for future capacity increases. We can observe the direct benefits of the proposed solution through the prism of improved worker wellbeing and increased quality consistency in the separation process.
The improved separation consistency leads to a higher purity level of the separated material, directly affecting all successive steps of the recycling process and increasing the quality of the recycled material while reducing its carbon footprint. Furthermore, management or maintenance workers can use the data from the camera vision system for statistical and real-time analysis of the shredding process, providing feedback. For instance, pieces that are shredded and aren't the right size could indirectly mean that there are problems with the QZ device, which would require preventative maintenance. On the other hand, more non-metal pieces on the conveyor could mean that the Eddy current separation needs to be fine-tuned. The intelligent use of statistical analysis, combined with integration with other production entities, can lead to an optimized processing cycle in view of Industry 4.0 through connection with ERP systems, smart logistics scheduling, and reduced energy consumption.
From a worker's perspective, the proposed solution perfectly illustrates the replacement of human workers with robots in dull, dirty, and dangerous environments. Workplaces in the recycling industry are often underpaid and risky due to the safety and health aspects of the work and are therefore desirable for automation, regardless of the economic aspects of the investment. Given the 8-hour shifts and the potential negative impact on workers' eyesight, musculoskeletal injuries, and disorders, particularly in standing positions, the proposed automation is highly desirable for the workers involved. The study proposes complete automation as the ideal scenario for robot integration, where a machine replaces all workers. This scenario allows for the reassignment of all workers from the previously low value-added assignment to other workplaces within the company, which is already experiencing a labor shortage.
However, given the complexity of the task, which includes variations in the shape, size, and weight of the metal pieces for separation, even partial automation can result in significant improvements for both the workers and the company. Compared to the current situation, a scenario where a single worker manages pieces undetected by the vision system or not picked by the robot offers significant benefits in terms of efficiency, ergonomy, and consistency. Reducing the workload for the worker directly improves their ergonomy and wellbeing by reducing stress and effort. In this scenario, the increased efficiency of the separation process, resulting from the reduction of workers assigned to the task and the near-perfect separation of non-ferrous metals, can directly and positively affect the remaining worker's wage, as it adds more value than before.
5. Conclusions
Based on the facts presented in this paper, and in accordance with the research objectives, the following can be concluded:
- Most often, automated processes or vision techniques, and collaborative robots assist humans in disassembling electrical devices during recycling. There aren't many examples that demonstrate the separation of shredded parts from e-waste. As it is not possible to create a universal e-waste recycling system due to the variety of types and forms of e-waste, the application of partial automation in the form of a flexible e-waste sorting station that would combine computer vision and collaborative robotic systems has great potential in recycling. This would make it possible to take advantage of the artificial intelligence, robotic systems, and the cognitive abilities of experienced workers that cannot be transferred to a robotic system, while the flexibility of the cell would be reflected in being easily adaptable for the separation of different types of e-waste that is recycled.
- The existing practice of e-waste management in Serbia is at a modest level, and the collection of this waste is done only sporadically through organized periodic collection actions by recyclers. We have not even come close to achieving the established national goals in terms of the e-waste recycling rate. The reason for this state of affairs is the inconsistency of domestic legislation with the European one, the lack of the necessary infrastructure for e-waste management at the local community and state level, as well as the insufficient environmental awareness of Serbian citizens.
- The possible use of robots in the e-waste separation process was looked at, using the recycling center "E-Reciklaža" as an example. It can be concluded that using robots in recycling would greatly improve workplaces that currently rely on manual labor and require workers to stand in awkward positions or deal with unhealthy materials like trash. The increased efficiency would have positive effects on wages, while the reduced workload would benefit the workers from sociological, ergonomic, and health perspectives. It would therefore have a positive impact on increasing Serbia's recycling rate.
Author Contributions
All authors contributed to this work: writing—review and editing, all authors. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Science Fund of the Republic Serbia, #6784, CircuBot.
Acknowledgments
This research was supported by the Science Fund of the Republic Serbia, #6784, Modular and versatile collaborative intelligent waste management robotic system for circular economy – CircuBot.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Kneževic, D.; Torbica S.; Rajkovic Z. and Nedic M. Industrial waste disposal. Faculty of Mining and Geology, University of Belgrade, Belgrade, Serbia, 2014; pp. 1-7.
- Nišić, D.D., Cvjetić, A.S. and Knežević, D.N., Mine Waste. Tehnika 2019, 74(1), pp.47-55. [CrossRef]
- Nišić, D.D., Pantelić, U.R. and Nišić, N.D., Legal regulations of industrial solid waste management in Serbia: Challenges on the way of developing the circular economy. Tehnika 2024, 79(1), pp.47-54. [CrossRef]
- Waste management program of the Republic of Serbia for the period 2022-2031. Available online: https://www.ekologija.gov.rs/sites/default/files/2022-03/program_upravljanja_otpadom_eng_-_adopted_version.pdf (accessed on 22 March 2024).
- Kirchherr, J., Reike, D. and Hekkert, M., Conceptualizing the circular economy: An analysis of 114 definitions. Resources, conservation and recycling 2017, 127, pp.221-232. [CrossRef]
- Rulebook on the list of electrical and electronic products, measures for prohibition and restriction of the use of electrical and electronic equipment containing hazardous substances, method and procedure for waste management of electrical and electronic products („Official Gazette of the Republic of Serbia “, No. 99/2010). Available online: https://www.paragraf.rs/propisi/pravilnik-listi-elektricnih-elektronskih-proizvoda-merama-zabrane-ogranicenja-koriscenja.html (accessed on 23 March 2024).
- Rulebook on categories, testing and classification of waste, („Official Gazette of the Republic of Serbia “, No. 56/2010, 93/2019 i 39/2021). Available online: https://www.paragraf.rs/propisi/pravilnik-kategorijama-ispitivanju-klasifikaciji-otpada.html (accessed on 23 March 2024).
- Tsydenova, O. and Bengtsson, M., Chemical hazards associated with treatment of waste electrical and electronic equipment. Waste management 2011, 31(1), pp.45-58. [CrossRef]
- The Law on Waste Management („Official Gazette of the Republic of Serbia“, No. 36/2009, 88/2010, 14/2016, 95/2018 – other law and 35/2023), Available online:. Available online: https://www.paragraf.rs/propisi/zakon_o_upravljanju_otpadom.html (accessed on 23 March 2024).
- Ramanayaka, S., Keerthanan, S. and Vithanage, M., Urban mining of E-waste: Treasure hunting for precious nanometals. Handbook of electronic waste management: 1st ed.; Butterworth-Heinemann: Oxford, United Kingdom, 2020; Chapter: 2. pp. 19-54, ISBN: 978-0-12-817030-4.
- A new circular vision for electronics: Time for a global reboot; World economic forum. Available online: https://www3.weforum.org/docs/WEF_A_New_Circular_Vision_for_Electronics.pdf (accessed on 25 March 2024).
- Shagun, A.K. and Arora, A., Proposed solution of e-waste management. International Journal of Future Computer and Communication 2013, 2(5), pp.490-493. [CrossRef]
- Alvarez-de-los-Mozos, E. and Renteria, A., Collaborative robots in e-waste management. Procedia Manufacturing 2017, 11, pp.55-62. [CrossRef]
- Forti V., Baldé C.P., Kuehr R., Bel G. The Global E-waste Monitor 2020: Quantities, flows and the circular economy potential. United Nations University (UNU)/United Nations Institute for Training and Research (UNITAR) – co-hosted SCYCLE Programme, International Telecommunication Union (ITU) & International Solid Waste Association (ISWA), Bonn/Geneva/Rotterdam 2020, ISBN Digital: 978-92-808-9114-0.
- Available online: https://allgreenrecycling.com/wp-content/uploads/2016/11/Namias_Thesis_07-08-1312.pdf (accessed on 1 April 2024).
- Shirodkar N, Terkar R. Stepped recycling: the solution for E-waste management and sustainable manufacturing in India. Materials Today: Proceedings. 2017, 4(8), pp. 8911-7. [CrossRef]
- Available online: https://mohua.gov.in/upload/uploadfiles/files/Part2.pdf (accessed on 1 April 2024).
- Lu, W. and Chen, J., Computer vision for solid waste sorting: A critical review of academic research. Waste Management 2022, 142, pp.29-43. [CrossRef]
- Wills, B.A. and Barley, R.W. eds., Mineral processing at a crossroads: problems and prospects, Vol. 117. Springer, Germany, 2012, pp. 206-2010.
- Knežević, D.; Mineral Processing. Faculty of Mining and Geology, University of Belgrade, Belgrade, Serbia, 2012. pp. 157-167.
- Gundupalli, S.P., Hait, S. and Thakur, A., A review on automated sorting of source-separated municipal solid waste for recycling. Waste management 2017, 60, pp.56-74. [CrossRef]
- Trumić, M., Trumić, M. and Bogdanović, G., Methods of plastic waste recycling with emphasis on mechanical treatment, Recycling and Sustainable Development 2012, 5(1), pp. 39-52. UDK: 628.477.6.043.
- Dodampegama, S., Hou, L., Asadi, E., Zhang, G. and Setunge, S., Revolutionizing construction and demolition waste sorting: Insights from artificial intelligence and robotic applications. Resources, Conservation and Recycling 2024, 202, p.107375. [CrossRef]
- Safronova, Natalya B., and Gulnaz I. Khaibrakhmanova. Innovative Design of Waste Processing Technologies. Serbian Journal of Management 16 2021, no. 2, pp.453-462. [CrossRef]
- Thien-An Tran Luu, Hong-Minh Le, Minh-Quyen Vu, Bich-Van Nguyen, AI application for solid waste sorting in Global South. Available online: https://sdgs.un.org/sites/default/files/2023-05/A41%20-%20Thien-An%20Tran%20Luu%20-%20AI%20Application%20for%20Solid%20Waste%20in%20the%20global%20south.pdf (accessed on 2 April 2024).
- Page, M. J., McKenzie, J. E., Bossuyt, P. M., Boutron, I., Hoffmann, T. C., Mulrow, C. D., Shamseer, L., Tetzlaff, J. M., Aki, E. A., Brennan, S. E., Chou, R., Glanville, J., Grimshaw, J. M., Hróbjartsson, A., Lalu, M. M., Li, T., Loder, E. W., Mayo-Wilson, E., McDonald, S.,...Moher, D. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. PLOS Medicine 2021, 18(3). [CrossRef]
- Kiyokawa, Takuya, Jun Takamatsu, and Shigeki Koyanaka. Challenges for Future Robotic Sorters of Mixed Industrial Waste: A Survey. IEEE Transactions on Automation Science and Engineering 2022, No. 21, pp. 1023-1040.
- Merdan, M., Lepuschitz, W., Meurer, T. and Vincze, M. Towards ontology-based automated disassembly systems. In Proceedings of IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society. Arizona, USA, 2010 Nov 7 (pp. 1392-1397). [CrossRef]
- Bogue R. Robots in Recycling and Disassembly. Industrial Robot - The International Journal of Robotics Research and Application 2019. Vol.46(4), pp.461-6. [CrossRef]
- Shahab, Sana, Mohd Anjum, and M. Sarosh Umar. Deep Learning Applications in Solid Waste Management: A deep literature review. International Journal of Advanced Computer Science and Applications 2022, Vol. 13 (2), pp.381-395. [CrossRef]
- Sharma, Himanshu, Harish Kumar, and Sachin Kumar Mangla. Enablers to computer vision technology for sustainable E-waste management. Journal of Cleaner Production 2023, Vol. 412 Article 137396. [CrossRef]
- Deng, W., Liu, Q., Pham, D.T., Hu, J., Lam, K.M., Wang, Y. and Zhou, Z. Predictive exposure control for vision-based robotic disassembly using deep learning and predictive learning. Robotics and Computer-Integrated Manufacturing 2024, Vol. 85, Article 102619. [CrossRef]
- Nafiz, Md Shahariar, Shuvra Smaran Das, Md Kishor Morol, Abdullah Al Juabir, and Dip Nandi., Convowaste: An automatic waste segregation machine using deep learning. In Proceedings of 3rd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), American International University-Bangladesh, January 7-9. 2023. pp. 181-186. [CrossRef]
- Ramadurai, Sruthi, and Heejin Jeong. Effect of human involvement on work performance and fluency in human-robot collaboration for recycling. In Proceedings of 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI). Sapporo, Japan, 7-10 March, 2022. [CrossRef]
- Chen, Y., Luo, Y., Yerebakan, M.O., Xia, S., Behdad, S. and Hu, B. Human workload and ergonomics during human-robot collaborative electronic waste disassembly. In Proceedings of the 3rd International Conference on Human-Machine Systems (ICHMS). Orlando, Florida, USA, 17-19 November 2022. [CrossRef]
- Diedler, S., Hobohm, J., Batinic, B., Kalverkamp, M. and Kuchta, K., WEEE data management in Germany and Serbia. Global Nest Journal 2018 , 20, pp.751-757. [CrossRef]
- Report on special waste streams in the Republic of Serbia for 2022. Available online: http://www.sepa.gov.rs/download/Posebni_tokovi_2022.pdf (accessed on 3 April 2024).
- Local waste management plan of the city of Belgrade 2021-2030. Available online: https://www.beograd.rs/images/file/b4b1aa1e6c2f3a2219a9c5e0f5f18a16_8185640472.pdf (accessed on 3 April 2024).
- Where to recycle: interactive map. Available online: https://gdereciklirati.rs/# (accessed on 3 April 2014).
- Marinković, T., Batinić, B. and Stanisavljević, N., Analysis of the Current System of Waste Electrical and Electronic Equipment Management in the Republic of Serbia. Proceedings of the 47th Conference in the Field of Municipal and Industrial Wastewater, Municipal Solid Waste and Hazardous Waste, Pirot, Republic of Serbia, April 2017.
- Report on waste management in the Republic of Serbia for the period 2011-2022. Available online: http://www.sepa.gov.rs/download/Upravljanje_otpadom_2011-2022.pdf (accessed on 4 April 2024).
- European Parliament, 2024, E-waste in the EU: facts and figures (infographic). Available online: https://www.europarl.europa.eu/topics/en/article/20201208STO93325/e-waste-in-the-eu-facts-and-figures-infographic (accessed on 4 April 2024).
- Directive 2012/19/EU of the European Parliament and of the Council of 4 July 2012 on waste electrical and electronic equipment (WEEE) (recast) Text with EEA relevance. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32012L0019 (accessed on 4 April 2024).
- Obradović, L., Bugarin, M., Stevanović, Z., Mikić, M. and Lekovski, R., Overview of current domestic legislation in the field of waste management and disposal. Rudarski radovi 2, Mining and Metallurgy Institute Bor, pp.93-106. UDK: 340.134:628.4(045)=861.
- Negotiations with the EU/Negotiation Clusters/Chapter 27, Environment. Available online: https://www.mei.gov.rs/srp/obuka/e-obuke/vodic-kroz-pregovore-srbije-i-evropske-unije/klasteri/klaster-4/poglavlje-27-zivotna-sredina/ (accessed on 4 April 2024).
- Mitić, L., Pavlović, M. and Vujanović, N., Management, regulation and reporting mechanisms on elеctronic waste recycling in Serbia. Ecologica 2023. 30(112), Scientific professional society for environmental protection of Serbia – ecologica, Belgrade, Serbia. pp.569-575. [CrossRef]
- Marinković, T., Berežni, I., Tošić, N., Stanisavljević, N. and Batinić, B., Challenges in applying extended producer responsibility policies in developing countries: A case study in e-waste management in Serbia. In Proceedings of the 9th International Conference on Sustainable Solid Waste Management, Corfu, Greece, June 2022.
- Marinković, T., Berežni, I., Tošić, N., Stanisavljević, N. and Batinić, B., Optimization of WEEE collection system: Assessment of key influencing factors for different scenarios in Novi Sad, Serbia. Proceedings of the 10th International Conference on Sustainable solid waste management, Chania, Crete, Greece, 21-23 June 2023. poster section.
- Analysis of the Current System of Waste Electrical and Electronic Equipment Management in the Republic of Serbia. Available online: https://naled.rs/htdocs/Files/01854/Analiza-stanja-upravljanja-elektricnim-i-elektronskim-otpadom-u-Republici-Srbiji.pdf (accessed on 4 April 2014).
- Register of operators licensed to manage e-waste. Available online: http://www.sepa.gov.rs/index.php?menu=20174&id=20055&akcija=ShowExternal (accessed on 5 April 2014).
- Nedić B., Models of collecting e-waste, Proceedings of the 7th National Conference on the quality of the life, Kragujevac, Serbia, 7-9th June 2012.
- Sovilj-Nikić, S., Savković, T.R., Kovač, P.P. and Sovilj, B., Recycling of electronic and electrical equipment and introduction in national legislation of Serbia. Proceedings of the 13th International Research/Expert Conference” Trends in the Development of Machinery and Associated Technology”, Hammamet, Tunisia, 16-21 October 2009.
- L. Mitić, “Monitoring of E-Waste Recycling Data,” in Sinteza 2021 - International Scientific Conference on Information Technology and Data Related Research, Belgrade, Singidunum University, Serbia, 2021, pp. 296-300. [CrossRef]
- V. L. Minić and M. M. Jovanović, Environmental education and education in younger grades of primary school (in Serbian), Proceedings of the Faculty of Philosophy in Priština, Vol. 49, no. 4, pp. 125-144, 2019. [CrossRef]
- UpPet project, This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 953214. Available online: https://uppet.eu/ (accessed on 5 May 2024).
- Nisic, D., Knezevic, D., Petkovic, A., Ignjatovic, M. and Kostadinovic, J., Study of general environmental awareness of the urban population. Proceedings of the 4th Human and Social Sciences at the Common Conference. University of Zilina, Zilina, Slovakia, November 2016.
- Dimić, V., Milošević, M. and Milošević, A., Developing awareness about e-waste management in information technology. Proceedings of 4th International Scientific Conference Agribusiness MAK-2017 „EUROPEAN ROAD“ IPARD 2015-2020, Kopaonik, Serbia, 27-28 January 2017. pp. 321-329.
- Vučković D. A Model for Sustainable Electrical and Electronic Waste Management in Serbia (in Serbian). Faculty of Economics and Engineering Management in Novi Sad, University Business Academy in Novi Sad, Novi Sad, Serbia, 2019.
- Decision on Establishing the National Environmental Protection Program. Available online: https://www.ekologija.gov.rs/sites/default/files/2021-01/nacionalni-program-zastite-zivotne-sredine-r.srbija.pdf (accessed on 5 May 2024).
- Gundupalli Paulraj, S., Hait, S. and Thakur, Automated Municipal Solid Waste Sorting for Recycling Using a Mobile Manipulator. Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Vol. 5A. American Society of Mechanical Engineers, Charlotte, North Carolina, USA, August 2016. [CrossRef]
- Brazier, J.P. and Prasetyo, J., Robotic Solution for the Automation of E-waste Recycling. Journal of Applied Science and Advanced Engineering 2023, 1(1), pp.11-17. [CrossRef]
- Álvarez-de-los-Mozos, E., Rentería-Bilbao, A. and Díaz-Martín, F., WEEE recycling and circular economy assisted by collaborative robots. Applied Sciences 202, 10(14), p.4800. [CrossRef]
- E-reciklaža, About us. Available online: https://www.ereciklaza.com/ (accessed on 5 June 2024).
- E-reciklaža 2010 d.o.o., Machine Recycling of Refrigerators and E-waste, Unpublished internal company document, Niš, Sebia, 2010.
- Lu W, Chen J. Computer vision for solid waste sorting: A critical review of academic research. Waste Management. 2022, Vol. 142, pp- 29-43.
- Sterkens W, Diaz-Romero D, Goedemé T, Dewulf W, Peeters JR. Detection and recognition of batteries on X-Ray images of waste electrical and electronic equipment using deep learning. Resources, Conservation and Recycling. 2021, Vol. 168, No.105246. [CrossRef]
- Neelakandan S, Prakash M, Geetha BT, Nanda AK, Metwally AM, Santhamoorthy M, Gupta MS. Metaheuristics with Deep Transfer Learning Enabled Detection and classification model for industrial waste management. Chemosphere. 2022, Vol. 308, No. 136046. [CrossRef]
- NACHI-FUJIKOSHI CORP, Standard cycle time explanation. Available online: https://www.nachi-fujikoshi.co.jp/eng/mz07/fastest02.html (accessed on 3 June 2024).
Figure 1.
PRISMA flowchart showing final results [26].
Figure 1.
PRISMA flowchart showing final results [26].
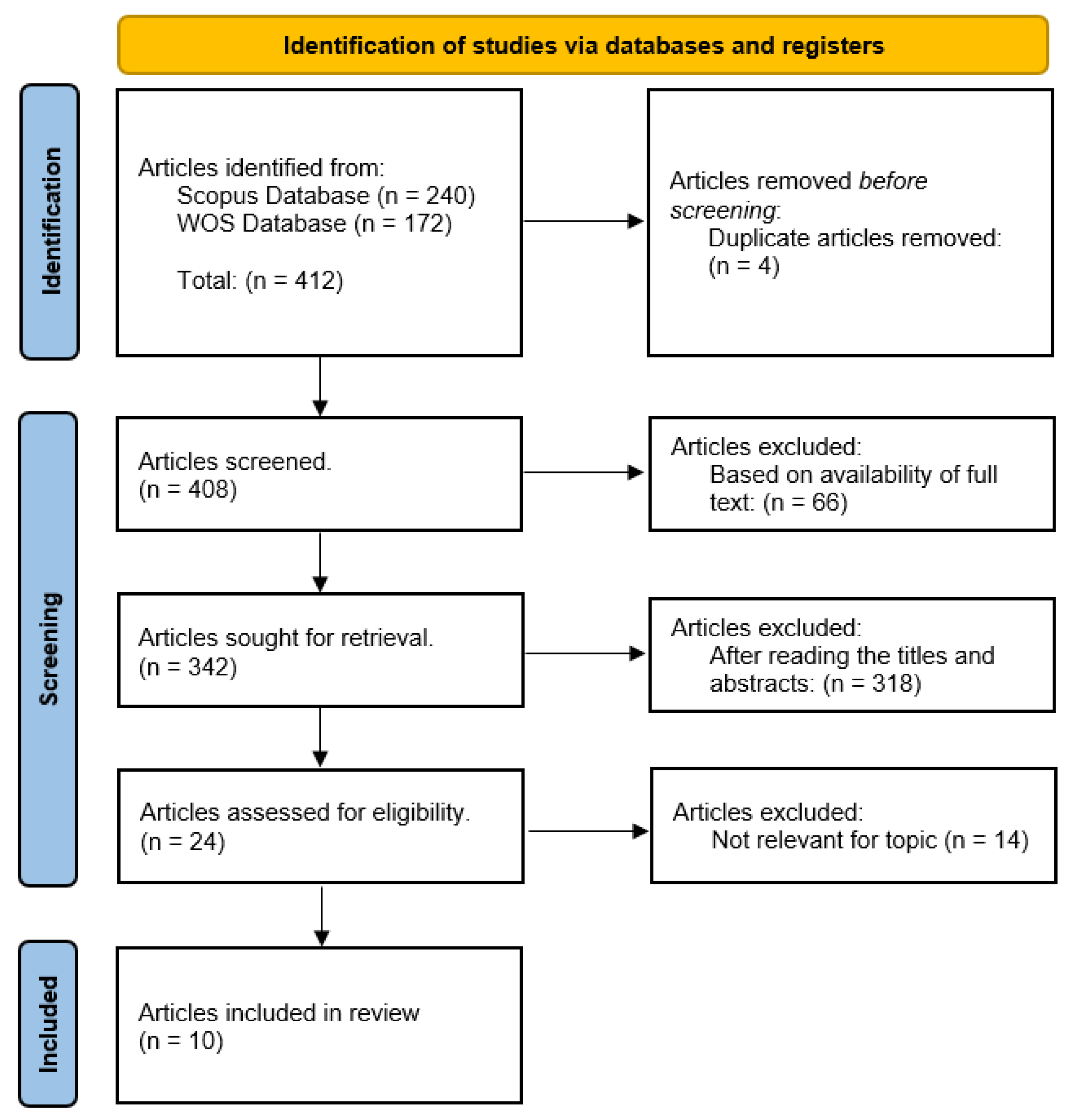
Figure 2.
Schedule and number of e-waste recycling and collection centers in Serbia [4].
Figure 2.
Schedule and number of e-waste recycling and collection centers in Serbia [4].
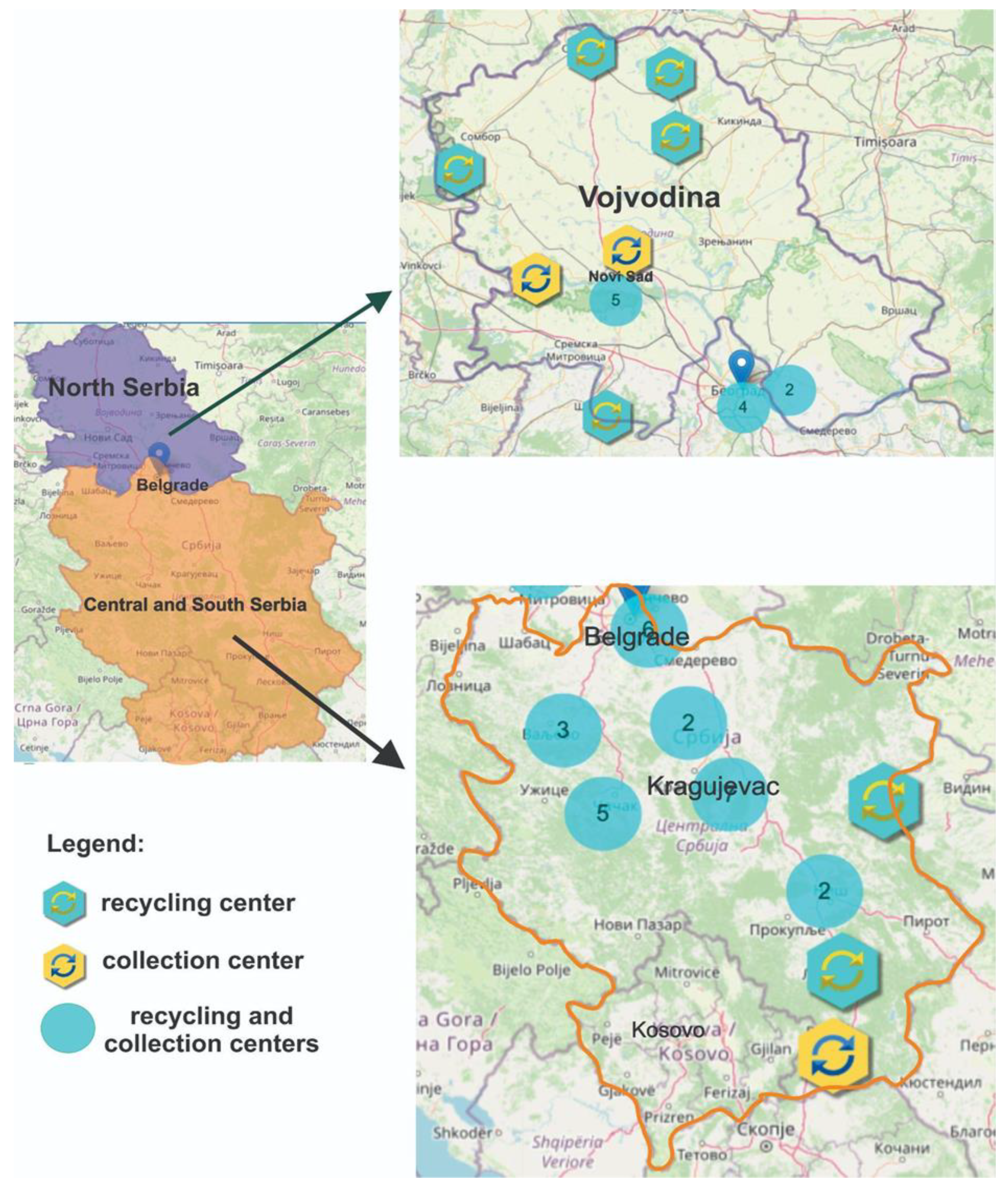
Figure 3.
Flow diagram of the refrigerator recycling process.
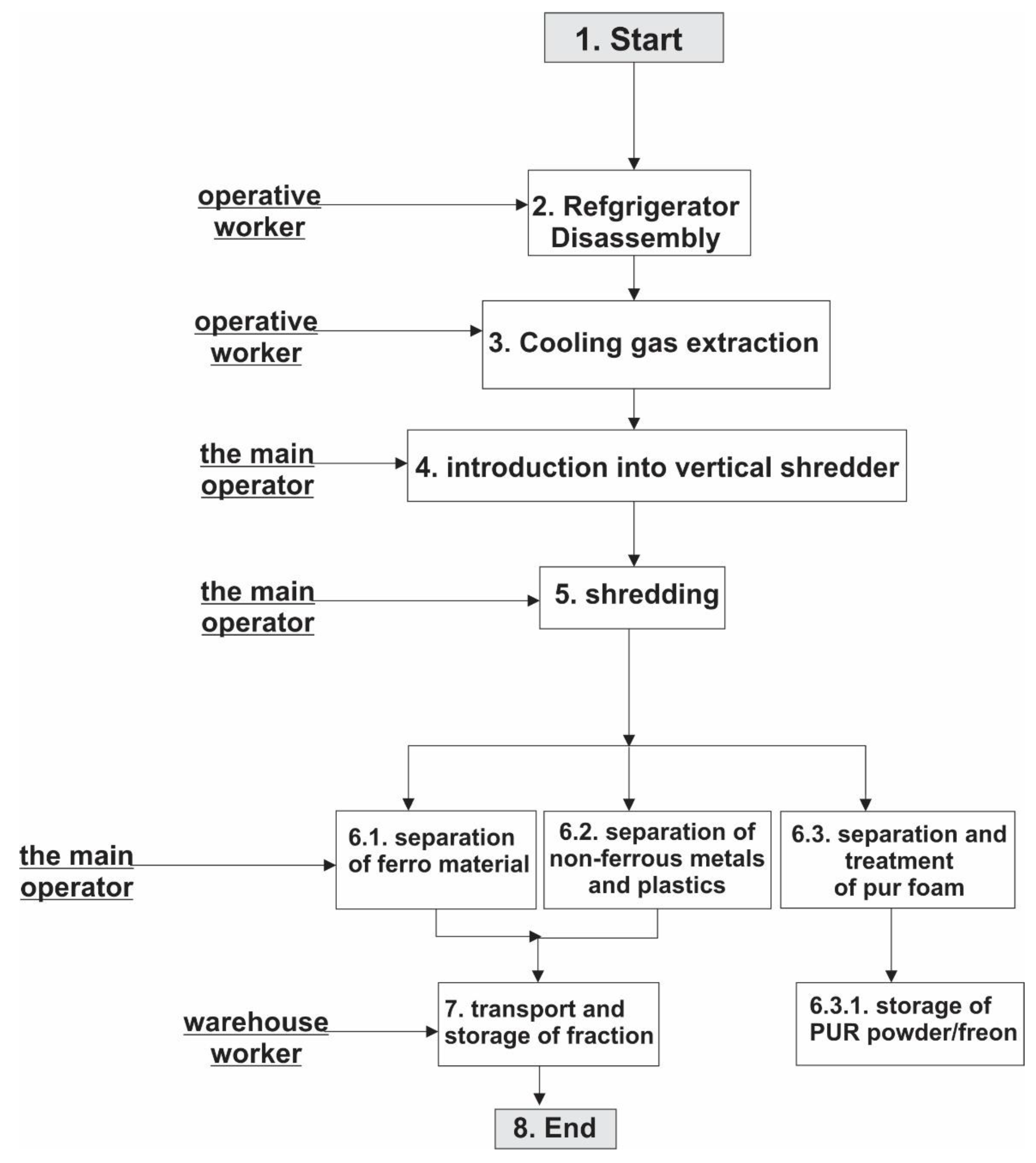
Figure 4.
Manual sorting of ferro-neutral metals (a) and recycled samples (b).

Figure 5.
A typical robotic waste separation setup.
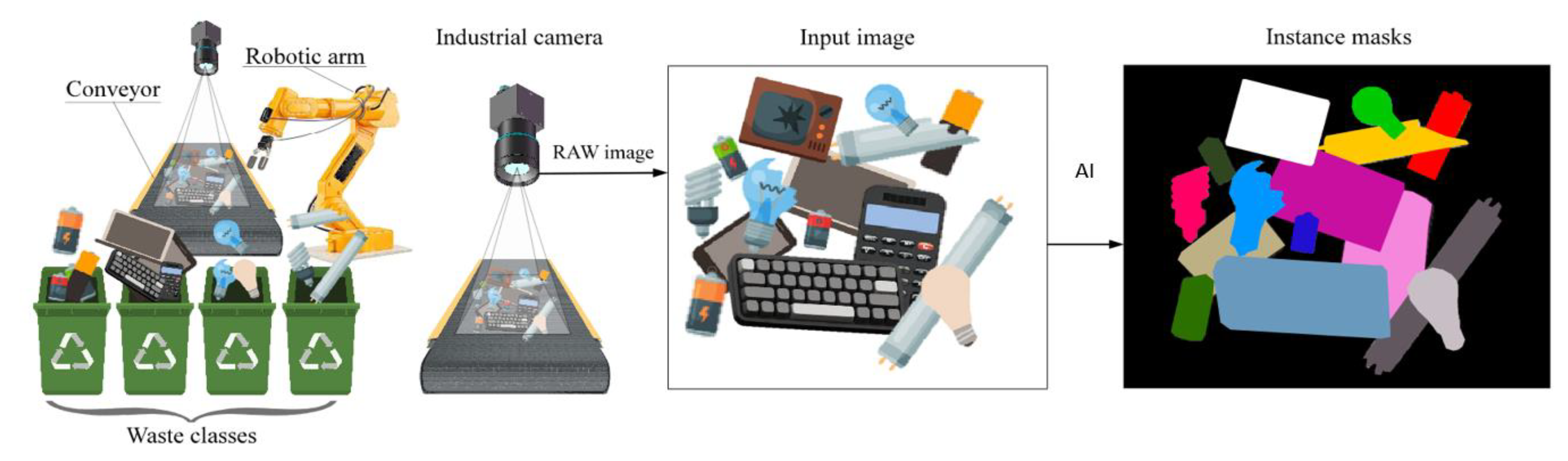

Table 1.
The insights from the selected papers.
| Reference | Country of the first author | Insights |
|---|---|---|
| 1. Kiyokawa et al., 2022 [27] | Japan |
|
| 2. Merdan et al., 2010 [28] | Austria |
|
| 3. Bogue, 2019 [29] | United Kingdom |
|
| 4. Alvarez-de-los-Mozos and Renteria, 2017 [13] | Spain |
|
| 5. Shahab et al., 2022 [30] | Saudi Arabia |
|
| 6. Sharma et al., 2023 [31] | India |
|
| 7. Deng et al., 2024 [32] | China |
|
| 8. Nafiz et al., 2023 [33] | Bangladesh |
|
| 9. Ramadurai et al., 2022 [34] | Chicago, USA |
|
| 10. Chen et al., 2022 [35] | Florida, USA |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



