
Submitted:
22 May 2024
Posted:
22 May 2024
You are already at the latest version
Abstract
While there are well-known synthetic methods in the literature to find the image of a point under circular inversion in l2−normed geometry (Euclidean geometry), there is no similar synthetic method in Minkowski geometry, also known as the geometry of finite-dimensional Banach spaces. In this study, we have succeeded in giving a synthetic construction for the circular inversion in l1−normed spaces, which is one of the most fundamental examples of Minkowski geometry. Moreover, this synthetic construction has been given using the Euclidean circle, independently of the l1−norm.
Keywords:
Finite-Dimensional Banach Spaces
; Minkowski Geometry
; Metric Geometry
; l1-Norm
; Manhattan Metric
; Taxicab Metric
1. Introduction
The main geometrical methods in the sciences go back to ancient times, and are based on lines and circles. The ubiquitous contemporary use of Fourier methods in physics and engineering, is mathematically equivalent to the methods used by Ptolomy.
Euclidean geometry has mainly evolved into Riemannian geometry, with local Euclidean geometry in the tangent spaces [1]. Another extension is in Minkowski-Finsler geometry, also referred to as Riemannian geometry without the quadratic restriction [2]. Just as Euclidean geometry in two dimensions is based on the circle as the basic figure for the isotropic determination of distances, Lamé curves (also referred to as supercircles and superellipses) form the basis of the simplest definitive Minkowski-Finsler geometries. Generalizing superellipses to any symmetry (Gielis transformations) extend the methods for the natural sciences to describe various natural anisotropies for different symmetries s (, etc. or any real value), as observed in starfish or diatoms [3]. Applying Gielis transformations to the "most “natural” curves and surfaces of Euclidean geometry, e.g. circles under the closed curves and logarithmic spirals under the non-closed curves in two dimensions, one obtains many shapes observed in nature in biology, crystallography, physics, and other fields [3,4].
In the past decade these curves and transformations have been used successfully to model of a wide variety of natural shapes, from plant leaves and tree rings to starfish and avian eggs [5]. Further applications of Finsler geometry in the natural sciences involving superellipses or Gielis curves, are found in forest ecology [6,7], seismic ray paths in anisotropic media [8], and the spreading of wildfires [9]. This has inspired various researchers to study various geometrical transformations, including inversions [10], whereby the inversion occurs with Lamé-Gielis curves as inversion circles.
Inversions are area-preserving transformations, whereby the area of a rectangle formed by the two distances from the center is equal to the area of the square on the radius of the circle. This is very similar to the parabola, a machine for transforming rectangles into squares with same area. In Euclidean geometry parabola, ellipse and hyperbola are related directly to the application of areas in Euclid’s Book II. Since the basics shapes of our simplest Minkowski-Finsler geometries are a one-step generalization of the classic conic sections, it is of great interest to return to the methods used in ancient times. While in Euclidean geometry the image of a point under circular inversion can be found by a synthetic method, in another type of geometry that “stands next to and is a relative of Euclidean geometry (which is called Minkowki geometry)” synthetic methods for circular inversion are not well known.
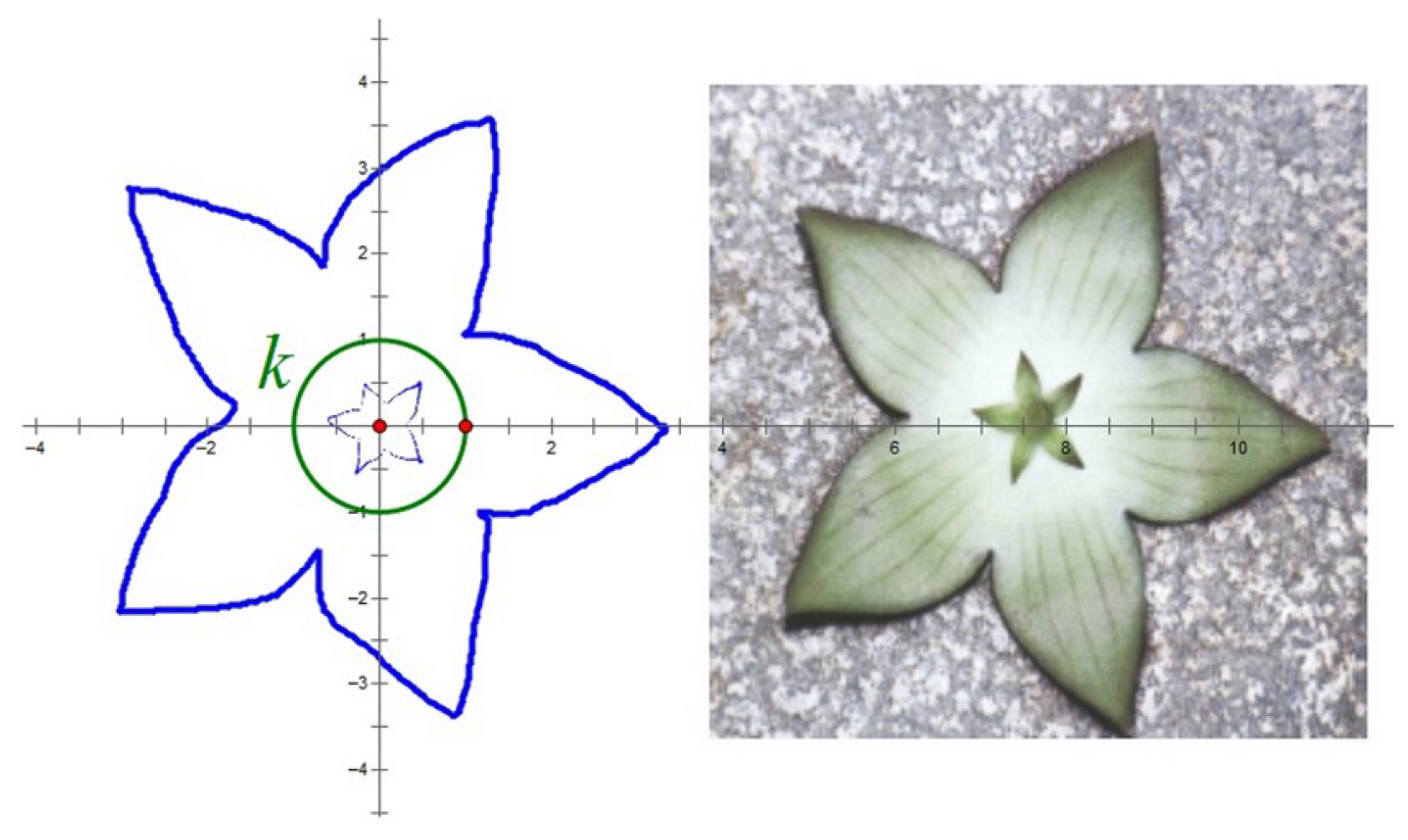
Figure 1.
Huernia flowers and how the outer edges of the corolla (blue) are obtained by inversion of the sepals (light blue) over the green circle k (see [10] for details).
Figure 1.
Huernia flowers and how the outer edges of the corolla (blue) are obtained by inversion of the sepals (light blue) over the green circle k (see [10] for details).
The concept of Euclidean distance can be generalized to any linear space by the introduction of a norm. In this sense, the geometry that reveals with the help of norms in finite-dimensional Banach spaces is called Minkowski geometry (we refer the reader to [11,12,13] for a wider treatment). This is often confused with spacetime geometry, also called Minkowski geometry. Hermann Minkowski (1864–1909) was a pioneer in both geometries, and the general structure of Minkowski space was introduced by Minkowski while working on some problems in number theory [14]. However, considering that Riemann mentioned norm in [15], it can be said that the first step towards Minkowski Geometry was taken by Riemann. A norm on a vector space V is a function for which the following hold for any V and :
i. (positive definite, ),
ii. (positive homogeneity ),
iii. (triangle inequality ).
A normed space is a set V with a norm defined on V. The most important thing that explains the relationship between normed spaces and metric spaces is the following proposition:
Lemma 1.
A normed linear space is a metric space with the distance
Proof.
The metric properties (nonnegative and symmetry) of are quite obvious from the norm axioms. From the triangular inequality property of the norm
for any . □
Also, the most well-known examples of normed spaces are normed space and normed normed space, whose definitions are given below.
Let be a vector in the dimensional real vector space . The norm defined as
Also, the pair is called normed or normed space. The norm is defined by
where , and . The pair is called normed space (we refer the reader to [16,17,18] for a wider treatment).
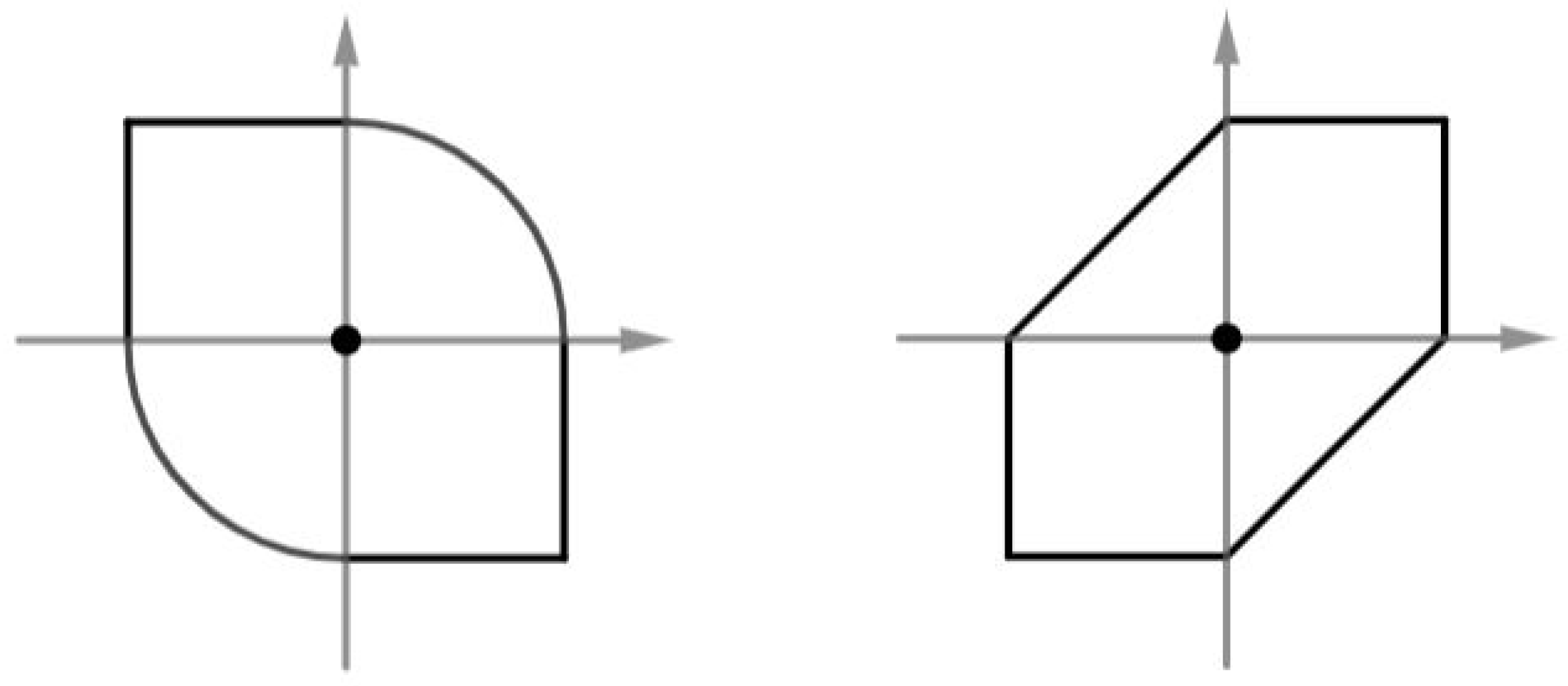
Figure 1 shows that the unit balls are convex with non-empty interior and centrally symmetric sets according to the and norms. However, norms that have unit balls that are centrically symmetric but not mirror symmetric can be defined as follows (see Figure 3):
Figure 2.
(a) Unit circles for varying norms, (b) Unit circles for varying norms.
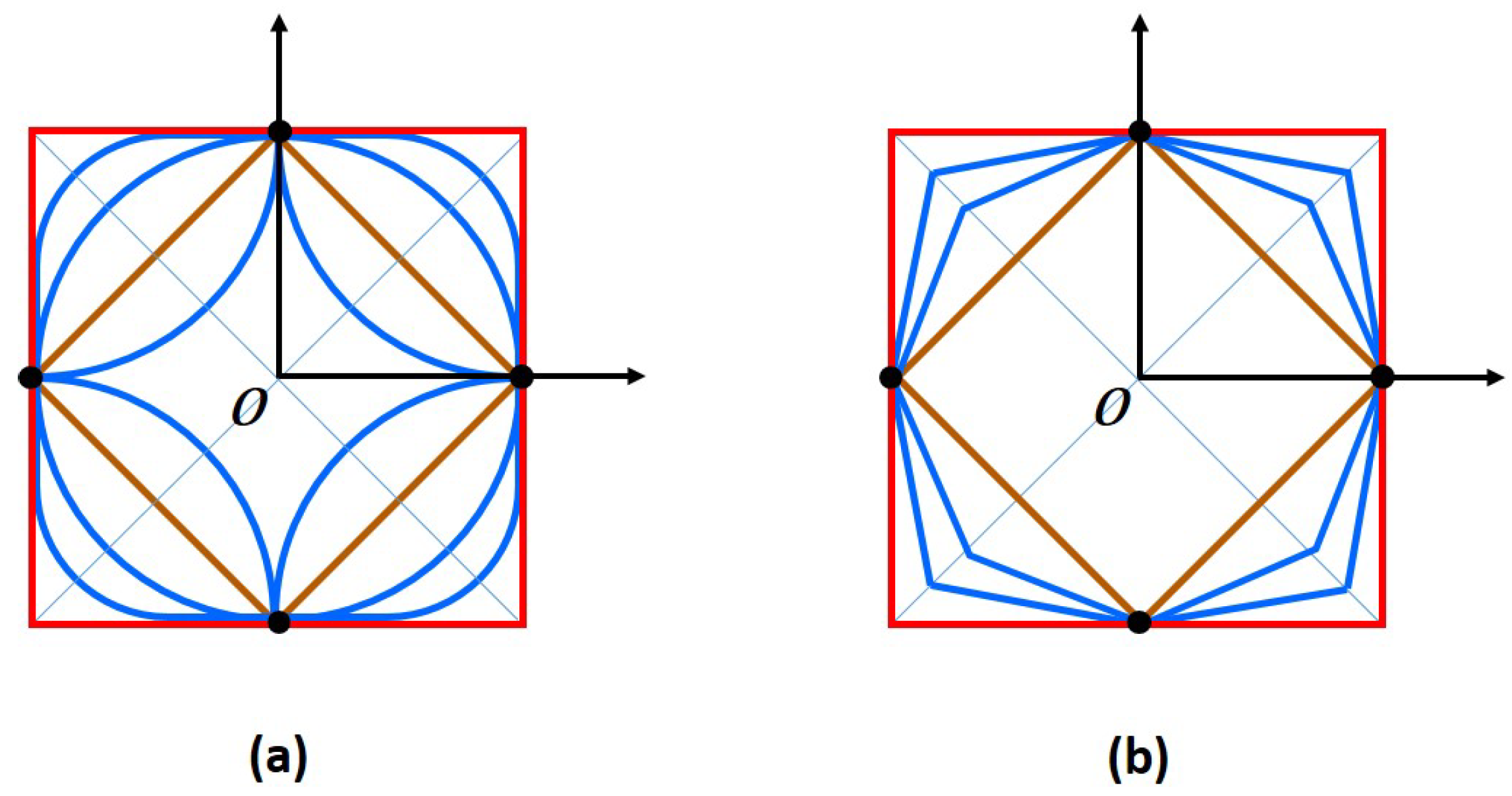
Figure 3.
Unit circles in terms of the norms , respectively.
As a result, it is clear from the definition of a norm that the unit ball has the following characteristics;
i) the unit ball is a closed and bounded set,
ii) the unit ball is centrally symmetric,
iii) the unit ball is convex.
Conversely, if B is a set satisfying the properties i, ii and iii, then the function
is a norm on for which B is the unit ball.
It should be noted here that the convex distance function induced by the convex set D that has a nonempty interior and is not necessarily centrally symmetric is defined via by
Although it is obvious that the convex distance function has the properties
and (homogeneity) such that for any vectors and , the distance function does not have to satisfy the symmetry property, which is one of the axioms of metric space. The distance function satisfies the symmetric axiom if and only if D is centrally symmetric. Thus, is a norm and the distance function is a metric on . The pair is called Minkowski geometry. Thanks to translation invariance and homogeneity, all points in any Minkowski geometry have the same status, and all geometric objects are centered at the origin. Furthermore, open balls are rescaled, translated versions of the unit ball . As a result, the fact that the norms can be interpreted and understood entirely with the help of the shapes of the unit balls shows that the structure of Minkowski geometry can be completely determined by the unit ball, which are centrally symmetrical convex bodies.
The idea of examining the invariance of concepts including the concept of distance in Euclidean geometry in Minkowski geometry when the Euclidean norm is replaced by an arbitrary Minkowski norm is quite interesting. However, this trade-off can cause even very elementary and simple questions to be very difficult to answer, and an answer may not even be found. One example is, while in Euclidean geometry the image of a point under circular inversion can be found by a synthetic method due to the unit ball having perfect symmetry, can a synthetic method be constructed for Minkowski geometry whose unit ball is centrally symmetric but not perfect?
The main motivation of this study is to seek an answer to the very difficult question above. In order to answer this question, we will take a short journey to circular inversion in Minkowski geometry with the norm and in the next section.
2. Visit to the Circular Inversion in Minkowski Geometries and
Let’s consider the circle . The inverse of an arbitrary point P, different from the center of symmetry of the circle O, with respect to the circle C is the point , such that
A circular inversion is sometimes referred to as a “reflection” relative to the circle. Obviously, if the inverse of point P is point , then the inverse of point is point P. Moreover, from Equation (2.1), it is clear that, except for the center of the inversion circle O, circular inversion will map the points inside the inversion circle to the points outside the circle, or the points inside the circle to the points outside. The points on the inversion circle C remain fixed under circular inversion. It should be noted that the center of the inversion circle O cannot be mapped to any point of the plane. However, points close to O are mapped to points far from O, and points far from O are mapped to points close to O. Thus, it would be meaningful to make a mapping between point at infinity and point O under circular inversion. Inversion mapping, which is one of the most important representatives of conformal functions that generally maps circles or lines into (same or different) circles or lines and preserves the angles between intersecting curves, is defined as follows (see [19] for more details):
Definition 1.
Let the circle be given. The inversion according the circle C is the mapping defined as follows; for all
such that is the point lying on the ray and , also and .
According to the above definition, in the plane equipped with the Manhattan norm (is given by) and the Euclidean norm (is given by ), circular inversion is formally defined as (see [20,21,22,23] for more details);
for and .
According to this definition, it is clear that finding the inverse of a point analytically will lead to tedious operations. In this sense, the following simple synthetic method, which is well known in the literature, has been proposed to find the inverse of a point according to the Euclidean norm .
Step 1 : Draw the tangent lines from point P to inversion circle C,
Step 2 :Label the point where the tangent lines touch circle C as and ,
Step 3 :The point where line segment intersects the ray is the inverse of P.
The inverse of a point in Euclidean geometry can be easily found by the above well-known synthetic method since the unit ball has perfect symmetry. However, a synthetic method for Minkowski geometry, in which the unit ball is centrally symmetric but does not necessarily have perfect symmetry, is not available in the literature. In order to give a synthetic method for circular inversion in Minkowski geometry, we will consider and normed spaces, which are the most classical examples of Minkowski geometry. If we manage to give a synthetic method for the Manhattan (or taxicab) geometry, which is corresponding to the special case of or in and normed spaces, we can attempt to generalize this method to Minkowski geometry. Thus, this method we will give for Manhattan geometry in the next section will illuminate our way in this difficult journey regarding the synthetic method we want to give in Minkowski geometry.
3. Main Result
3.1. Notation and Preliminary
We will denote the metric induced by the norm by , which is called the taxicab or Manhattan metric, and formulate it as . Similarly, the metric induced by the norm is formulated by . Similarity of triangles will be denoted by “∼”. Also, from the definition of the metric , the following proposition is quite clear (see [24] for more details).
Lemma 2.
Let L be a line through the points and in the analytical plane. If L has slope m, and is not a vertical line,
If L is a vertical line, then .
3.2. Synthetic Construction for Circular Inversion in Normed Space
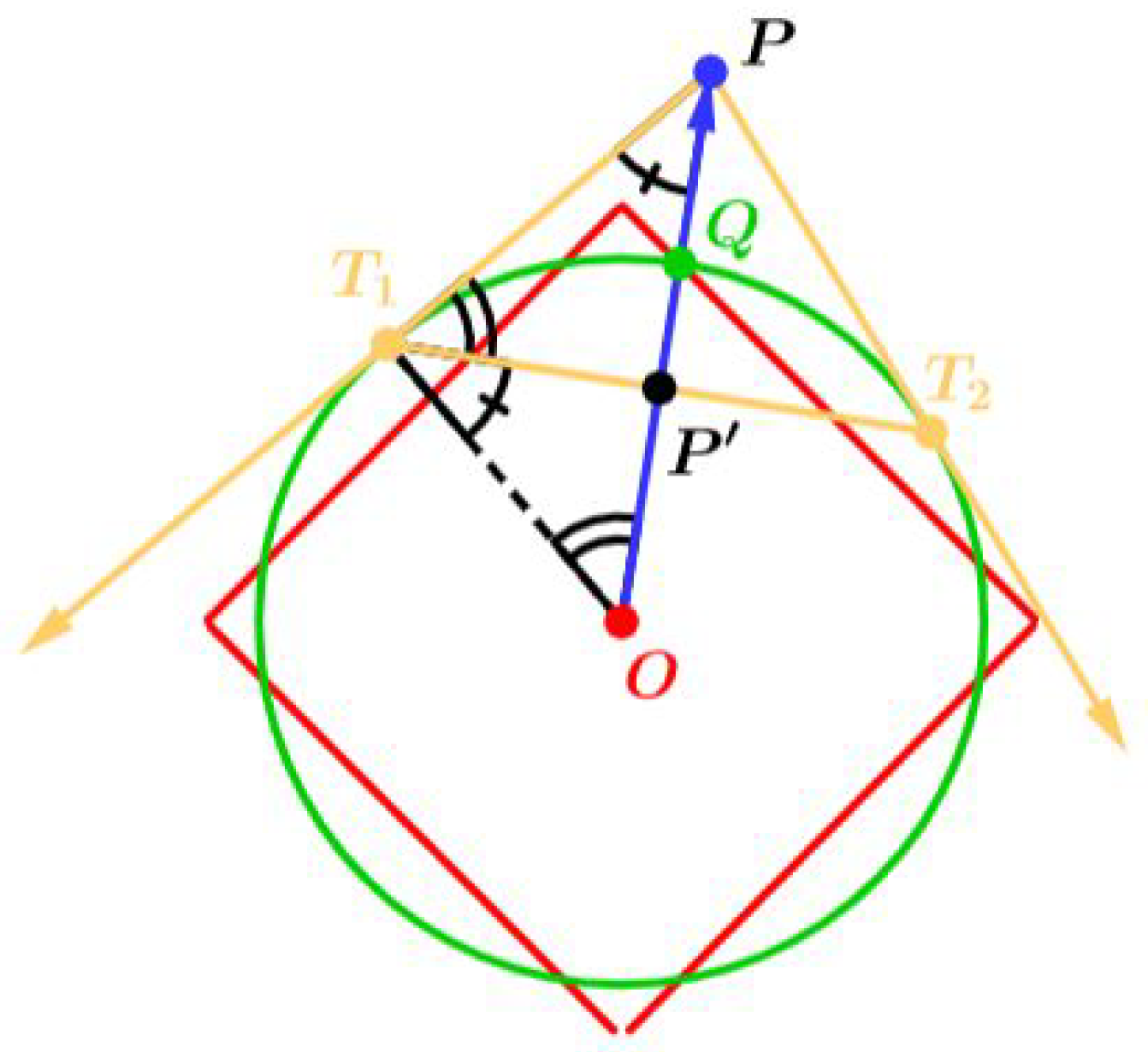
Let be a normed circle with the radius and center O.
If P is an exterior point to , then the point Q, which is the intersection of the circle with the ray is determined. Afterward, an Euclidean circle C is constructed with the radius centered at the point O. Then, the tangent lines and are drawn from are to the Euclidean circle. The point where the line segment intersects the ray is the inverse of the desired point (see Figure 5).
Indeed, it is simply observed that , hence
Therefore,
Using the relation given in Lemma 2, which allows conversion between the Euclidean metric and the taxicab metric , we obtain that
By making simplifications in the above equation, we have that
If point P is taken outside the circle, only the roles of points P and will change. Therefore the synthetic construction is the same.
Theorem 1
(Main Theorem). be a normed circle with the radius and center O in the Minkowski plane . Then, the image of a point P under the inversion with respect to the is
where and are the points that the tangents drawn from point P to the Euclidean circle with radius such that and center at O touch the Euclidean circle.
4. Conclusion
Open problem: In Minkowski geometry with norm (Euclidean geometry), the image of a point under circular inversion can be found by synthetic method. Similarly, can a synthetic method be constructed to find the image of a point under circular circular inversion in Minkowski geometry (geometry that emerges through norms in a finite-dimensional Banach space)?
The fact that circles corresponding to the norm in Minkowski geometry are centrally symmetric but do not always have mirror symmetry makes this question quite difficult. In this work, we have succeeded in giving a synthetic method for circular inversion for normed spaces. Based on the method given here, we will try to generalize this method to Minkowski geometry, regardless of the norm, in our future work.
References
- Cartan, E. Géométrie Euclidienne et géométrie Riemannienne. Scientia English translation in Beyond Geometry - Classic papers from Riemann to Einstein Dover Publications. 2007, 49, 393–402. [Google Scholar]
- Chern, S.S. Finsler Geometry Is Just Riemannian Geometry without the Quadratic Restriction; Notices of the AMS, 1996; pp. 959–963. [Google Scholar]
- Verstraelen, L. A concise mini history of geometry. Kragujev. J. Math. 2014, 38, 5–21. [Google Scholar] [CrossRef]
- Koiso, M.; Palmer, B. Equilibria for anisotropic energies and the Gielis Formula. Forma (Soc. Sci. Form Jpn.) 2008, 23, 1–8. [Google Scholar]
- Gielis, J.; Shi, P.; Beirinckx, B.; Caratelli, D.; Ricci, P. E. Lamé-Gielis curves in biology and geometry. In Proceedings of the 2021 International Conference Riemannian Geometry and Applications (RIGA), Bucharest, Romania; 2021. [Google Scholar]
- Antonelli, P. L.; Miron, R. Lagrange and Finsler geometry: applications to physics and biology (Vol. 76); Springer Science and Business Media, 2013. [Google Scholar]
- Antonelli, P. L; Rutz, S. F. Finslerian diffusions in forest ecology: Retrospective and open problems. Nonlinear Studies Int. J. 2014, 21, 631–639. [Google Scholar]
- Yajima, T.; Nagahama, H. Finsler geometry of seismic ray path in anisotropic media. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 2009, 465, 1763–1777. [Google Scholar] [CrossRef]
- Javaloyes M.A.; Pendás-Recondo, Sánchez M. Gielis Superformula and Wildfire models. 2024, (submitted).
- Mladinić, P.; Radović, N. Geometrija prirode; Proven grupa: Zagreb, 2018. [Google Scholar]
- Martini, H.; Swanepoel, K.; WeiB, G. The geometry of Minkowski spaces - a survey. part I. Expo. Math. 2001, 19, 97–142. [Google Scholar] [CrossRef]
- Martini, H.; Swanepoel, K. The geometry of Minkowski spaces - a survey. part II. Expo. Math. 2004, 22, 93–144. [Google Scholar] [CrossRef]
- Balestro, V.; Martini, H. Minkowski Geometry—Some Concepts and Recent Developments. In Surveys in Geometry I; Papadopoulos, A., Ed.; Springer International Publishing, 2021; pp. 49–94. [Google Scholar]
- Minkowski, H. Sur les propriétés des nombres entiers qui sont dérivées de l’intuition de l’espace. Nouvelles annales de mathématiques: journal des candidats aux écoles polytechnique et normale 1896, 15, 393–403. [Google Scholar]
- Riemann, B. Uber die Hypothesen, welche der Geometrie zu Grunde liegen. Abhandlungen der Königlichen Gesellschaft der Wissenschaften in Göttingen 1868, 13, 133–152. [Google Scholar]
- Gelişgen, Ö.; Kaya, R. On α- distance in three dimensional space. Appl. Sci. 2006, 8, 65–69. [Google Scholar]
- Gelişgen, Ö.; Kaya, R. Generalization of α- distance to n-dimensional space. KoG 2006, 10, 33–35. [Google Scholar]
- Gelişgen, Ö.; Kaya, R. On αi- distance in n-dimensional space. Appl. Sci. 2008, 10, 88–93. [Google Scholar]
- Blair, D.E. Inversion Theory and Conformal Mapping; American Mathematical Society, 2000. [Google Scholar]
- Gelişgen, Ö.; Ermiş, T. Some properties of inversions in alpha plane. Forum Geom. 2019, 19, 1–9. [Google Scholar]
- Gelişgen, Ö.; Ermiş, T. Inversions and fractal patterns in alpha plane. Int. Electron. J. Geom. 2023, 16, 398–411. [Google Scholar] [CrossRef]
- Rubiano, G.N. Circle Inversion [A Modern Visual Perspective], e-Book; 2022.(Available online from the link, https://www.researchgate.net/profile/Gustavo-Rubiano/research).
- Şen, A.O. lp-normlu uzaylarda inversiyon dönüşümünün özellikleri. Master Thesis, Eskisehir Osmangazi University, (in Turkish) 2022.
- Kaya, R. Area formula for taxicab triangles. Pi Mu Epsil. J. 2006, 12(4), 219–220. [Google Scholar]
Figure 4.
A standard construction for Euclidean circular inversion.
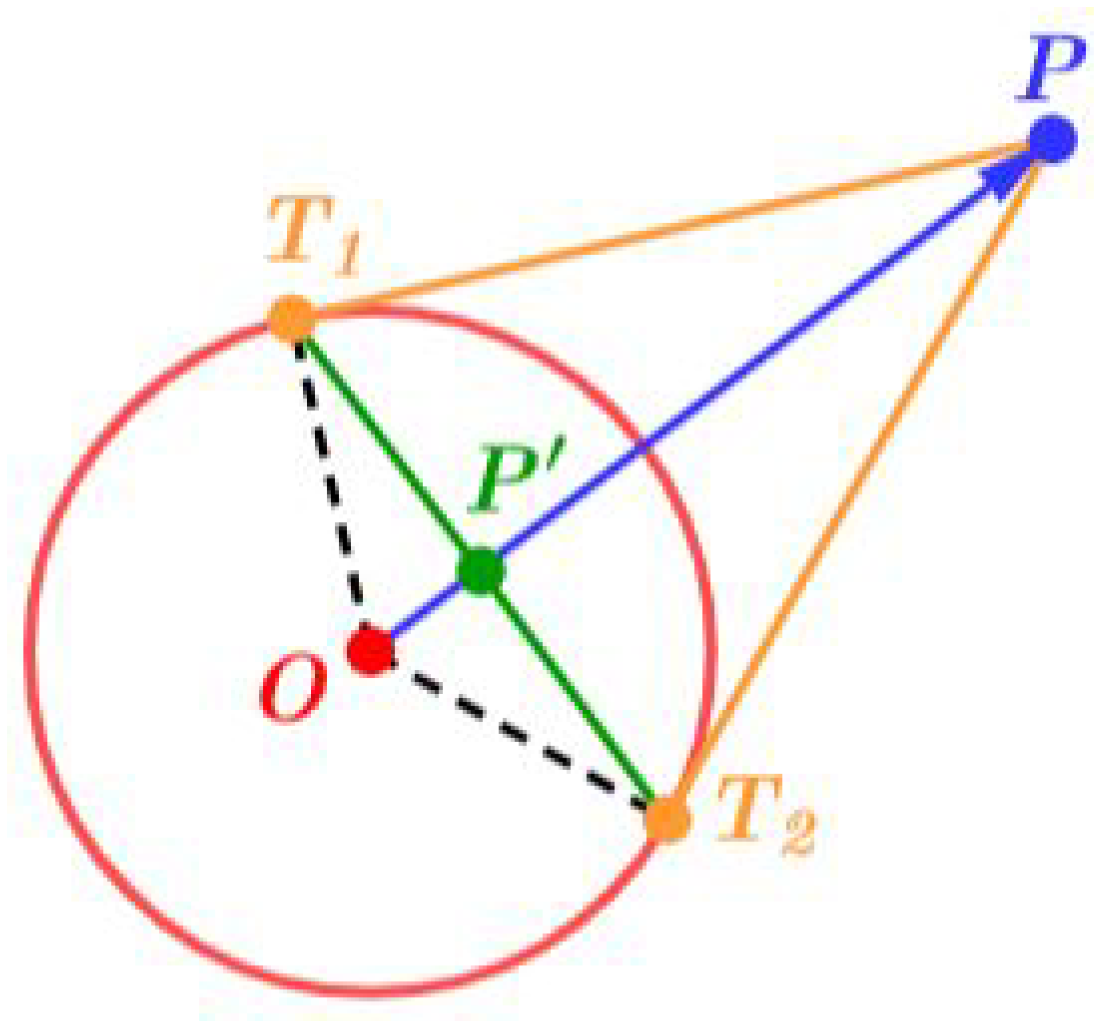
Figure 5.
A new construction for circular inversion in terms of norm.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



