Submitted:
12 January 2024
Posted:
12 January 2024
You are already at the latest version
Abstract
The special affine Fourier transform (SAFT) is a useful and powerful analyzing tool in signal processing, optics and communications. In this paper, we mainly discuss the randomized nonuniform sampling and reconstruction for random signals bandlimited in the SAFT domain. First, we show that the nonuniform sampling is identical to the uniform sampling after a pre-filter in the sense of second order statistic characters. Then, we propose an approximate reconstruction based on sinc interpolation for the nonuniform sampling of random signals bandlimited in the SAFT domain. Finally, we give the mean square error estimate for the proposed approximate recovery approach.
Keywords:
special affine Fourier transform
; nonuniform sampling
; random signals
; error estimate
; approximate recovery
MSC: 46E22; 94A20
1. Introduction
The special affine Fourier transform (SAFT) was firstly proposed in [1] to model optical systems. It offers a unified viewpoint of known signal processing transforms, such as Fourier transform (FT), fractional Fourier transform (FrFT), linear canonical transform (LCT), Laplace transform (LT) and so on. It can also include some optical operations on light waves, such as rotation, magnification, hyperbolic transformation, free space propagation, Lens transformation and so on. The SAFT is a six-parameters linear integral transform which is defined by offsetting two extra parameters on the basis of the LCT, so SAFT is also known as the offset linear canonical transform (OLCT). It has been proved that the SAFT is a useful tool for signal processing, communications, quantum mechanics and optics [12,16,23,26]. Many classical results such as Zak transform, Poisson summation formula and convolution theorems are established in the SAFT domain [6,24,33].
Let
be a matrix with six real parameters satisfying . The continuous-time SAFT associated with the parameter matrix A of a signal is defined as in [1],
where the kernel function is given by
It is noted that when , the SAFT of a signal is essentially a chirp multiplication. Therefore, we shall confine our attention to the case of . The inverse SAFT is expressed as
where and
Sampling is one of the most fundamental process in digital signal processing which provides a bridge between the continuous physical signals and the discrete digital signals. Beginning with the Shannon’s sampling theorem of bandlimited signals [15], various sampling such as nonuniform sampling, average sampling, dynamic sampling, random sampling, mobile sampling, timing sampling and multi-channel sampling have been generally studied for signals bandlimited in the FT domain [2,3,5,9]. With the appearance and developments of the more general transforms, the corresponding sampling theories are extended to the signals bandlimited in the FrFT, LCT and SAFT domains [6,12,14,18,19,21,22,23,25,26,27,30,32].
Signals in the real world often presents random characteristics and sampling for random signals bandlimited in the FT domain has been generally studied [5,7,8,17]. In recent years, there have existed many researches for sampling of random signals bandlimited in the FrFT and LCT domains [10,11,20,28,31]. The uniform sampling theorems in [10] was extended to the SAFT domain as in [29]. Nonuniform sampling is a more realistic sampling scheme due to the limitations of data acquisition and processing ability. In fact, the nonuniform sampling theories including the periodic nonuniform sampling model, N-order recurrent nonuniform sampling model, nonuniform sampling due to migration of a finite number of uniform samples and the general nonuniform sampling have been given for signals bandlimited in the LCT domain [31] and signals bandlimited in the SAFT domain [4,30], respectively. In particular, the nonuniform sampling problem was also considered in [11] for random signals bandlimited in the LCT domain, where a randomized nonuniform sampling method and a class of approximate recovery approaches by using sinc interpolation functions were studied. In this paper, we will further study the randomized nonuniform sampling for random signals bandlimited in the SAFT domain and also give an approximate recovery method based on the sinc interpolation.
The paper is organized as follows. In section 2, we give the definition of the power spectral density in the SAFT domain. In section 3, we study the nonuniform sampling scheme and propose an approximate recovery approach. In section 4, the mean square error estimate for the proposed approximate recovery method is demonstrated.
2. Power Spectral Density in the SAFT Domain
Given a probability space a stochastic process is said to be wide sense stationary if it has zero mean and its auto-correlation function
is independent of , i.e., , where denotes mathematical expectation and the superscript * stands for the complex conjugate. Two stochastic processes and are said to be jointly stationary, if and are both stationary and their cross-correlation function
is independent of , i.e., .
We next introduce the SAFT auto-correlation function, the SAFT cross-correlation function, the SAFT auto-power spectral density and the SAFT cross-power spectral density as in [29]. For two random signals and , the SAFT auto-correlation function of is defined as
Similarly, the SAFT cross-correlation function of and is defined as
Remark 2.1.If the random signalis stationary, thenis also stationary. In fact,
Moreover, one has
Therefore, must be independent of t. In such case, we have
Define the SAFT auto-power spectral density of the random signal by
and the SAFT cross-power spectral density of the random signals and as
It follows from (1.1) and (2.6) that
Multiplicative filtering in the SAFT domain is showed in Figure 1, which has been introduced in [29]. More specifically, we first obtain the SAFT of the input signal and apply the multiplicative filter in the SAFT domain. Then the output signal in the time domain is obtained by the inverse SAFT. Mathematically, the output is given by
where and .
Define normalized convolution
for [23]. Then we have the following conclusion.
Proposition 2.2.
Proof we only need to prove
It follows from the definition of the SAFT that
3. Nonuniform Sampling and Approximate Recovery
In this section, we will study the nonuniform sampling and reconstruction of random signals which are bandlimited in the SAFT domain.
Definition 3.1.
[29] We say that a random signal is bandlimited in the SAFT domain if its SAFT power spectral density satisfies
where is called the bandwidth of the random signal in the SAFT domain.
Lemma 3.2.
Assume that a random signal is bandlimited in the SAFT domain with bandwidth and is stationary. Then is bandlimited in the FT domain with bandwidth and the power spectral density satisfies supp.
Proof Since is stationary, it follows from (2.5) and (2.6) that
Note that Then the desired result is proved. First, we will show that the nonuniform sampling is identical to uniform sampling after a pre-filter in the sense of second order statistic characters.
Theorem 3.3.
Suppose that the random signal is bandlimited in the SAFT domain with bandwidth and is stationary. Then in the sense of second order statistic characters, the nonuniform sampling of at the sampling points (Figure 2 ) is identical to the uniform sampling after a SAFT filter as in Figure 3, where , {} is a sequence of independent identically distributed random variables with zero mean in the interval . Moreover,
and denotes the characteristic function of .
Proof Note that . Then it follows from Lemma 2.2 that
Moreover, one has
Hence, we have
which is independent of t and is stationary. It follows from (2.8) and (3.3) that
This together with (2.5) obtains
Combining (2.5) and (2.8), we have
Let and be the probability density function of Z. Note that and are independent and have identical distributions. Let be their common probability density function. Then we have
where * denotes the convolution operator. Moreover, one has
where
Substituting (3.9) into (3.7) obtains
This together with and (3.6) proves the desired result.
In the following, we will give an approximate recovery method for bandlimited signals in the SAFT domain based on randomized nonuniform samples.
Lemma 3.4.
[13] Suppose that the random signal is bandlimited in the Fourier transform domain with bandwidth , {} and {} are two sequences of independent identically distributed random variables with zero mean. Then an approximate recovery formula of nonuniform sampling for the random signal can be represented by
where , , and .
Theorem 3.5.
Suppose that the random signal is bandlimited in the SAFT domain with bandwidth and is stationary. Then can be approximated from its nonuniform samples by utilizing the sinc interpolation function as
where and are as in Lemma 3.4.
Proof It follows from Lemma 3.2 that is bandlimited in the FT domain with bandwidth . By (3.11), we know that
is an approximation of . Note that . Then in (3.12) is an approximate recovery approach of and the proof is completed.
From Theorem 3.5, one can see that the approximate recovery approach using the sinc interpolation for a random signal that is bandlimited in the SAFT domain can be expressed in Figure 4.
4. Error estimate for Nonuniform Sampling
Since the reconstruction with randomized sinc interpolation is an approximate method, we will estimate the approximation error in this section.
Lemma 4.1.
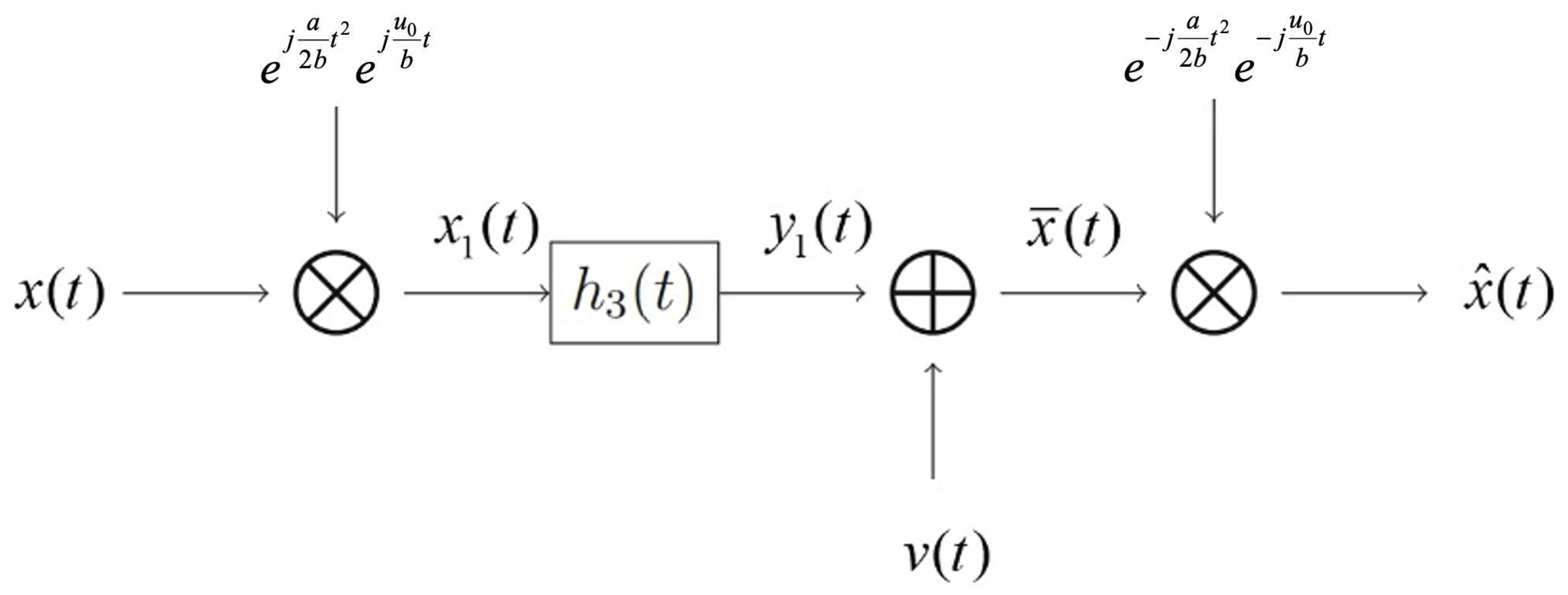
Let random signals and be the input and output of the FT multiplicative filter as in Figure 5. Then
where is the FT of , that is,
Proof Note that Then
which is independent of t. Moreover, one has
Taking FT on both sides of (4.1) and (4.2) obtains
and
Combining (4.3) and (4.4) gives
Theorem 4.2.
Suppose that the random signal is bandlimited in the SAFT domain with bandwidth and is stationary. Let be an additive noise with zero mean, which is stationary, uncorrelated with and has the power spectral density
Proof It follows from Theorem 3.5 that
Then one has
Moreover, it can be represented by two terms as
Note that and
These together with the fact that show that
Moreover, we have
Substituting (4.9) and (4.10) into (4.7) obtains
Similarly, we can obtain
Therefore, we have
and
It follows from Lemma 4.1 that the first term in (4.13) is the FT power spectral density of in Figure 5. Furthermore, since and is uncorrelated with , then
Moreover, one has
which shows that the second term in (4.13) is just the power spectral density of , that is,
Therefore, the model described in Figure 5 is identical to the procedure represented in Figure 4 in the sense of second order statistic characters.
Next, we will estimate the error . Let . Combining (3.2) and (4.13), we get
Similarly, we can obtain
In fact, it is easy to see that
Therefore, is independent of t due to (4.12). Then
Moreover, it follows from (2.7) that
Hence, the SAFT auto-power spectral density of the reconstruction error is
where we have used the fact that is real due to (3.2). Note that
Then is stationary. Moreover, it follows from (2.5) and (2.8) that
This completes the proof.
()f and equal to zero, then the nonuniform sampling studied in this paper reduces to the uniform sampling. In such case, . Then it follows from Theorem 4.2 that
That is to say, is equal to its approximation in the mean square sense. From Theorem 3.5, one can see that for , the approximation of obtained in (3.12) becomes
which coincides with Theorem 3 in [29]. Therefore, the result of uniform sampling proposed in [29] is a special case of Theorems 3.5 and 4.2 in this paper.
Acknowledgments
The project is partially supported by the National Natural Science Foundation of China (No.12261025), Center for Applied Mathematics of Guangxi (No. AD23023002), Guangxi Colleges and Universities Key Laboratory of Data Analysis and Computation.
Conflicts of Interest
The authors declare that they have no competing interests.
References
- S. Abe, J. T. Sheridan. Optical operations on wave functions as the Abelian subgroups of the special affine Fourier transformation. Optics Letters, 1994, 19: 1801–1803.
- K. Adam, A. Scholefield, M. Vetterli. Sampling and reconstruction of bandlimited signals with multi-channel time encoding. IEEE Transactions on Signal Processing, 2020, 69: 1105-1119.
- A. Aldroubi, J. Davis, I. Krishtal. Dynamic sampling: Time-space trade-off. Appl. Comput. Harmon. Anal., 2013, 34: 495–503.
- Y. Bao, Y. Zhang, Y. Song, B. Li, P. Dang. Nonuniform sampling theorems for random signals in the offset linear canonical transform domain. Proceedings of APSIPA Annual Summit and Conference, 2017, Kuala Lumpur, Malaysia, 94–99.
- R. F. Bass, K. Gröchenig. Random sampling of bandlimited functions. Isral J. Math., 2010, 177(1): 1-28.
- A. Bhandari, A. I. Zayed. Shift-invariant and sampling spaces associated with the special affine Fourier transform. Applied and Computational Harmonic Analysis, 2019, 47: 30–52.
- H. Boche, U. J. Mönich. Approximation of wide-sense stationary stochastic processes by Shannon sampling series. IEEE Transactions on Information Theory, 2010, 56(12): 6459–6469.
- F. Gilles, K. Sinuk. Average sampling of band-limited stochastic processes. Applied and Computational Harmonic Analysis, 2013, 35(3): 527–534.
- K. Gröchenig, J. L. Romero, J. Unnikrishnan, M. Vetterli. On minimal trajectories for mobile sampling of bandlimited fields. Appl. Comput. Harmon. Anal., 2015, 39: 487–510.
- H. Huo, W. Sun. Sampling theorems and error estimates for random signals in the linear canonical transform domain. Signal Processing, 2015, 111: 31–38.
- H. Huo, W. Sun. Nonuniform sampling for random signals bandlimited in the linear canonical transform domain. Multidimensional Systems and Signal Processing, 2020, 31: 927–950.
- X. Liu, J. Shi, W. Xiang, Q. Zhang, N. Zhang. Sampling expansion for irregularly sampled signals in fractional Fourier transform domain. Digital Signal Processing, 2014, 34: 74–81.
- S. Maymon, A. V. Oppenheim. Sinc interpolation of nonuniform samples. IEEE Trans. Signal Process., 2011, 59 (10): 4745–4758.
- F. Oktem, H. Ozaktas. Exact relation between continuous and discrete linear canonical transforms. IEEE Signal Processing Letters, 2009, 16(8): 727–730.
- C. E. Shannon. Communication in the presence of noise. Proc. IRE, 1949, 37: 10–12.
- K. Sharma, S. Joshi. Signal separation using linear canonical and fractional Fourier transforms. Optics Communications, 2006, 265(2): 454–460.
- Z. Song, W. Sun, X. Zhou, Z. Hou. An average sampling theorem for bandlimited stochastic processes. IEEE Transactions on Information Theory, 2007, 53(12): 4798–4800.
- A. Stern. Sampling of compact signals in the offset linear canonical transform domains. Signal, Image and Video Processing, 2007, 1(4): 359–367.
- R. Tao, B. Li, Y. Wang, G. Aggrey. On sampling of band-limited signals associated with the linear canonical transform. IEEE Transactions on Signal Processing, 2008, 56(11): 5454–5464.
- R. Tao, F. Zhang, Y. Wang. Sampling random signals in a fractional Fourier domain. Signal Processing, 2011, 91(6): 1394–1400.
- D. Wei, Q. Ran, Y. Li. Multichannel sampling and reconstruction of bandlimited signals in the linear canonical transform domain. IET Signal Processing, 2011, 5(8): 717–727.
- H. Zhao, R. Wang, D. Song. Recovery of bandlimited signals in linear canonical transform domain from noisy samples. Circuits Systems and Signal Processing, 2014, 33(6): 1997–2008.
- H. Zhao, R. Wang, D. Song, T. Zhang, D. Wu. Extrapolation of discrete bandlimited signals in linear canonical transform domain. Signal Processing, 2014, 94: 212–218.
- Q. Xiang, K. Qin. Convolution, correlation, and sampling theorems for the offset linear canonical transform. Signal, Image and Video Processing, 2014, 8(3): 433–442.
- Q. Xiang, K. Qin, Q. Huang. Multichannel sampling of signals band-limited in offset linear canonical transform domains. Circuits Systems and Signal Processing, 2013, 32(5): 2385–2406.
- S. Xu, Y. Chai, Y. Hu. Spectral analysis of sampled band-limited signals in the offset linear canonical transform domain. Circuits Systems and Signal Processing, 2015, 34(12): 3979–3997.
- S. Xu, Y. Chai, Y. Hu, C. Jiang, Y. Li. Reconstruction of digital spectrum from periodic nonuniformly sampled signals in offset linear canonical transform domain. Optics Communications, 2015, 348: 59–65.
- S. Xu, L. Feng, Y. Chai, Y. He. Analysis of A-stationary random signals in the linear canonical transform domain. Signal Processing, 2018, 146: 126–132.
- S. Xu, L. Feng, Y. Chai, Y. Hu, L. Huang. Sampling theorems for bandlimited random signals in the offset linear canonical transform domain. AEU-International Journal of Electronics and Communications, 2017, 81: 114–119.
- S. Xu, L. Huang, Y. Chai, Y. He. Nonuniform sampling theorems for bandlimited signals in the offset linear canonical transform. Circuits Systems and Signal Processing, 2018, 37: 3227–3244.
- S. Xu, C. Jiang, Y. Chai, Y. Hu, L. Huang. Nonuniform sampling theorems for random signals in the linear canonical transform domain. International Journal of Electronics, 2018, 105(6): 1051–1062.
- L. Xu, F. Zhang, R. Tao. Randomized nonuniform sampling and reconstruction in fractional Fourier domain. Signal Processing, 2016, 120: 311–322.
- X. Zhi, D. Wei, W. Zhang. A generalized convolution theorem for the special affine Fourier transform and its application to filtering. Optik, 2016, 127: 2613–2616.
Figure 1.
Multiplicative filtering in the SAFT
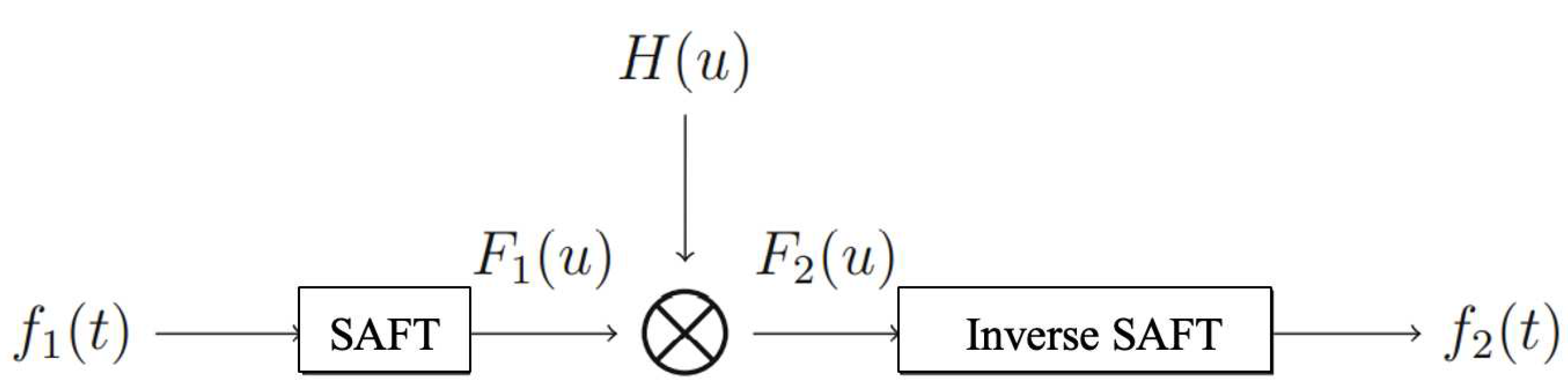
Figure 2.
The nonuniform sampling process
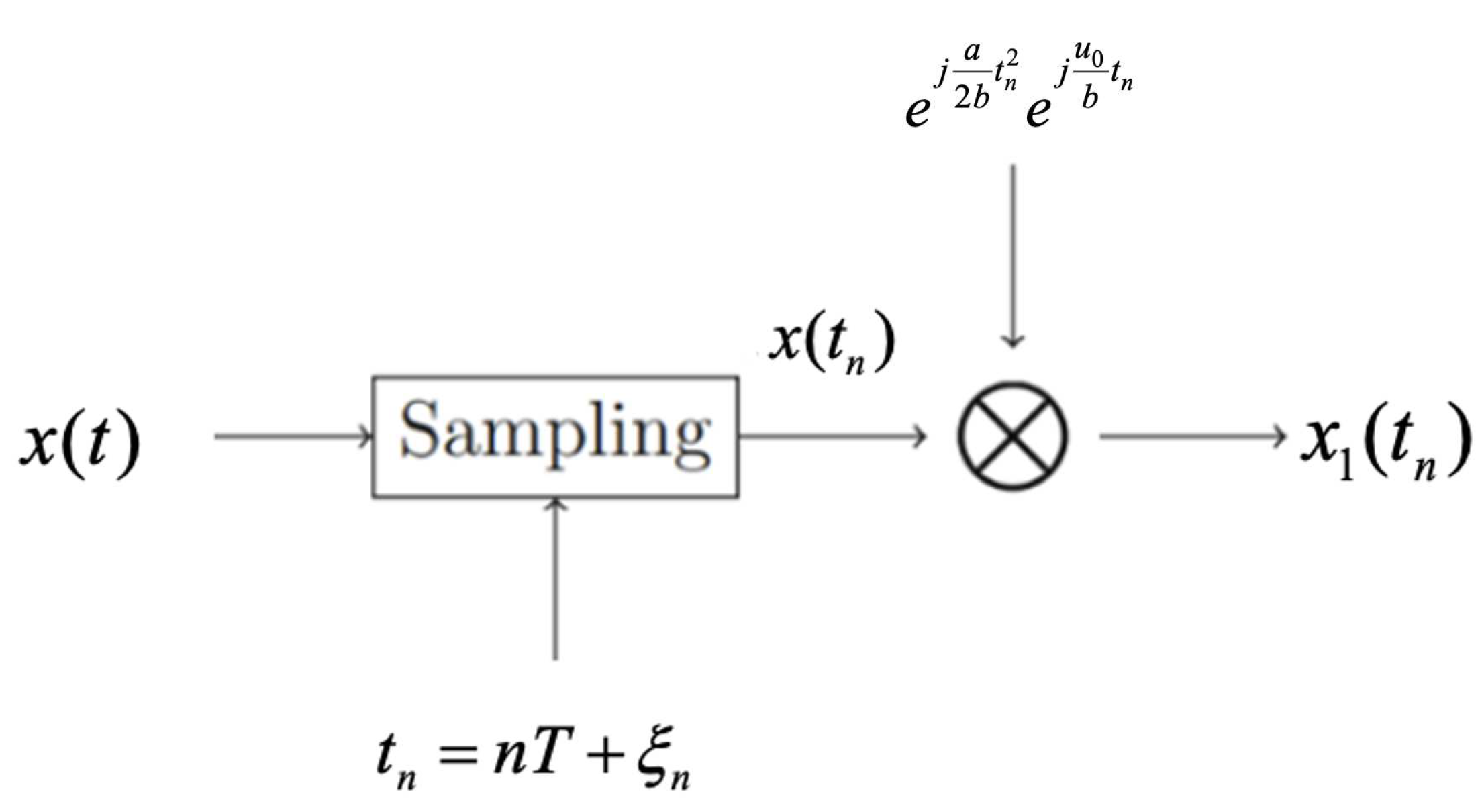
Figure 3.
The equivalent system of the nonuniform sampling, where the filtering through filter means that
Figure 3.
The equivalent system of the nonuniform sampling, where the filtering through filter means that

Figure 4.
The approximate reconstruction with sinc interpolation function, where
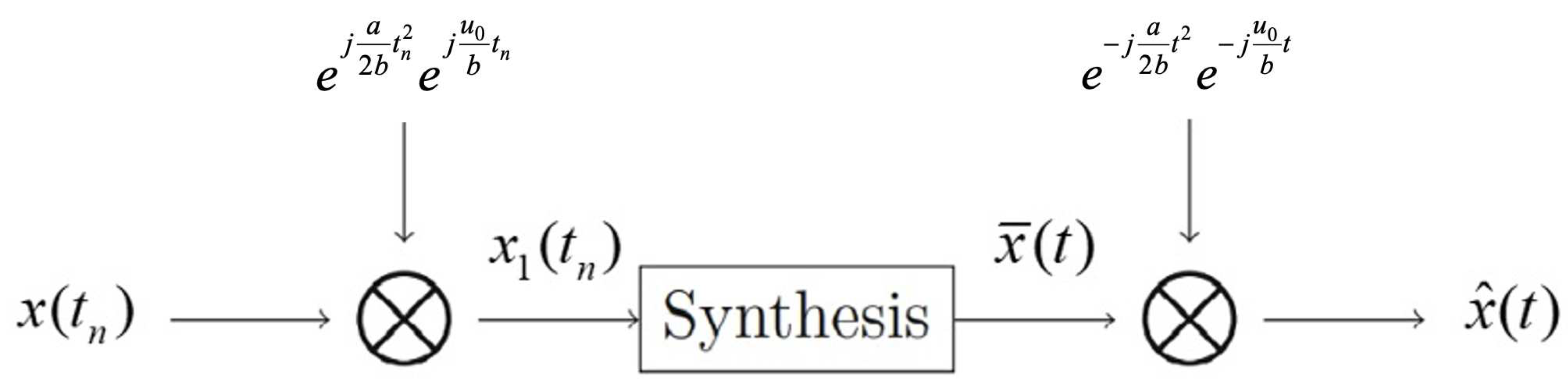
Figure 5.
An equivalent nonuniform sampling and reconstruction system to Figure 4, where is an additive noise with zero mean which is uncorrelated with and has power spectral density as (4.5).
Figure 5.
An equivalent nonuniform sampling and reconstruction system to Figure 4, where is an additive noise with zero mean which is uncorrelated with and has power spectral density as (4.5).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



