
Submitted:
24 April 2023
Posted:
25 April 2023
You are already at the latest version
Abstract
Distracted driving is the leading cause of accidents, the cause of these distractions may include drowsiness, using cell phone, smoking a cigarette, etc. The proposed paper aims at monitoring the attentiveness of the driver and alerting the driver when his/her alertness goes below a certain threshold. It uses image processing using OpenCV (Computer Vision) and You Look Only Once (YOLO) algorithm to detect the eyes and object respectively and sounds an alarm when the driver is either drowsy or using his cell phone or smoking a cigarette.
Keywords:
Driver Jetson Nano
; Drowsiness Detection
; Object Detection (Cigarette & Cell Phone)
; OpenCV
; You Look Only Once (YOLO) Algorithm
; Air Fuel Ratio
; Engine Control Unit (ECU)
; Speed Control
1. Introduction
The transport industry plays a critical role in the economy of a country, as it enables the movement of goods and people from one place to another. The transport industry is essential for economic growth, social and economic connectivity, accessibility to goods and services, international trade, and environmental sustainability.
In the early days of the transport industry, safety was not a significant concern, and accidents were prevalent. However, advancements in technology, regulation, and training have led to significant improvements in safety. Presently some of the safety features available are Seatbelts, Airbags, Anti-lock Braking Systems (ABS), Traction Control Systems etc. These improvements have led to a significant reduction in accidents and fatalities, making the transport industry safer for everyone.
The American Automobile Association (AAA) Foundation for Traffic Safety have said that a driver with less than five hours of sleep is just as likely to crash as someone who is drunken. Cell phones have become widely popular since the introduction of internet and multimedia features, hence almost everyone owns them since it has become an integral part of our lives.
However, using one when driving has also become redundant since the introduction of steering-controlled multimedia and hands-free calling. Yet people continue to use them to text and drive and many such activities that can lead to loss of attention on the road. Using a cell phone in one hand and driving with the other can cause all sorts of problems such as with changing the gear and turning the steering wheel at the same time. And hence coming out of certain difficult situations can be very hard.
India falls second in the usage of tobacco by country worldwide, after China. Since smoking in public places is a punishable offense, people tend to smoke in all sorts of places. Some smoke in remote areas, while some take to their terraces. Smoking a cigarette stimulates the release of adrenaline from the brain which is a sensation of joy and vigor. Sometimes smoking may result in light-headedness and even dizziness, even when all this happens some people smoke when driving which can cause impairment and cloud their decision-making when driving.
With all such distractions in mind, the Advanced Driver Safety System aims to detect the distractions such as Drowsiness, cell phone usage, and even cigarette smoking. This is achieved using Image Processing using OpenCV and YOLO algorithms. When the above distractions are detected, the system alerts the driver and if the distraction persists then the speed of the vehicle is regulated via fuel injection using ECU fuel mapping control.
2. Related works
[1] Sukrit Mehta et al., One of the main factors contributing to deadly traffic collisions is sleepy driving, which claims lives of numerous people every year. Serious accidents are frequently the result of driver fatigue and microsleep while operating the vehicle. The identification of driver tiredness and its symptoms is a focus of continuous research since early indicators of weariness can be identified before a serious situation occurs. The majority of conventional techniques for sleepiness detection relies on behavioral indicators, however some methods are intrusive, might provide a distraction for drivers, or need expensive equipment. Consequently, in this work, a quick, real-time system for detecting driver sleepiness is developed and incorporated. The system records the footage, and after analyzing the images, it can determine the driver's face in each frame. In order to assess the driver's level of fatigue, the system computes the EAR (Eye Aspect Ratio) and ECR (Eye Closure Ratio) utilizing facial landmark recognition and adaptive thresholding. Automated learning techniques have been utilized to assess the performance of the proposed approach. According to empirical findings, the suggested approach can use a random forest classifier to obtain an accuracy of 84%.
[2] Deeksha Phayde et al. had proposed a real-time drowsiness diagnostic system using the OpenCV algorithm. Road safety is significantly impacted by drowsiness or weariness, which is a key contributor to accidents on the road. If drowsy drivers are alerted early, many tragic incidents can be prevented. A variety of sleep detection technologies are available that track drivers' levels of inattentiveness while they are on the road and alert them if necessary. When determining the degree of tiredness, appropriate facial expressions such as yawning, eye closure, and head movement can be extracted. To ascertain whether a driver is sleepy, both the biological state of their body and the behavior of the car are examined. The available mechanisms for the driver's drowsiness are fully analyzed, and the most widely employed classification systems are also thoroughly examined. The classification of existing techniques is into three groups: behavior, physical strategies, and life-parameter-based strategies. Second, supervised learning techniques for sleep apnea are being examined. Thirdly, several approaches are compared and their benefits and drawbacks are examined. For greater comprehension, the diagrams also provide full descriptions of the study frameworks. Due to the risks posed by driver drowsiness, researchers have created several ways to detect it. However, each method has advantages and disadvantages of its own. This paper developed a search engine unit to acquire pertinent data in order to conduct an important study of Drowsiness Detection Techniques (DDT) and acceptable categorization methods. This paper continues to concentrate our search on credible journals and conferences that publish work. A multi-stage testing and selection procedure has been designed.
[3] Chandan G et al., have proposed a method for Real-Time Item Identification and Tracking Using Deep Learning and OpenCV. Deep learning has significantly influenced how society is reacting to artificial intelligence during the past few years. RCNN (Region-based Convolutional Neural Networks), Faster-RCNN, SSD (Single Shot Detector), and the well-known technique are YOLO. When speed is more crucial than accuracy, YOLO performs best, whereas Faster-RCNN and SSD perform better. To effectively execute identification and tracking, deep learning blends Mobile Nets and SSD. This method effectively recognizes objects without losing speed.
[4] Jayshri Sudhir Potdar et al. had suggested in creating a four-cylinder engine hardware engine control unit. A control unit is essential for boosting the motor economy in the car industry, where the use of electrical devices has significantly grown. This research presents the architecture of a four-cylinder motor control device that manages gasoline injection and spark ignition. Engine control units carefully manage the timing of the spark plugs and fuel injection in internal combustion engines to increase driving pleasure and lower fuel usage. The development of an engine management unit for a car is the topic of this article. The proposed approach seeks in order to replace current Engine Control Units in the vehicles with a fully configurable, inexpensive Engine Control Unit built on a shared electrical circuit. The S9keaz128 controller, which is used in many of the car's onboard components, is the foundation of this technology. This motor control device makes use of a variety of sensors to collect precise inputs, make smart choices, and instruct the vehicle's actuators. In the proposed method, electromagnetic compatibility standards are used to make a printed circuit board with two layers for the motor control module.
[5] E Vargil et al., had proposed a Computerized Control Unit for an Electronic Fuel Injection Vehicle's Engine Management System and Adaptive Cruise Control System. The focus of this article is on simulating the design of an Electronic Control Unit for an engine management system and an Adaptive Cruise Control. The simulation model allows for the analysis of information from a range of sensors, such as engine temperature, vehicle proximity, and engine speed. Data from a number of sensors is sent to the electronic fuel injector actuators that the ECU utilizes to modify vehicle speed. The ECU model regulates the engine speed using an open-loop control method that makes use of EMS while simulating failures to create a fault-tolerant system. In conjunction with the IR Sensor and Adaptive.
[6] Liang Zhang et al., had proposed a study on the fluctuation in fuel injection quantity and compensation control for multiple injections of the common rail system. In order to solve the problem of erroneous injection quantity in numerous injections of a high-pressure common rail injection system, a simulation model of the system was created in the AMESim environment. An investigation is also done into the features of injection quantity variation in relation to the duration of the pilot injection and the number of future injections. The findings demonstrate unpredictable fluctuation in injection amount, and as dwell time increases, so does the extent of the variance. Also, when the amount of the pilot injection rises while that of the main injection stays the same, the amplitude of the fuel injection quantity fluctuation rises. Moreover, it has been shown that rail pressure may influence the unpredictable nature of fuel injection. Moreover, the amplitude of the variation in fuel injection volume increases as pilot injection amount increases under the same main injection. Moreover, it has been found that fuel injection amount fluctuation may be impacted by rail pressure. Moreover, it has been discovered that rail pressure might impact the unpredictability of fuel injection. Finally, a fuel reimbursement management system based on a map for numerous injections is developed, and it has the potential to significantly enhance injection control.
[7] Sudan Jha et al. proposed a Real-Time Driver Drowsiness Detection Using OpenCV and Facial Landmarks. In this paper, an object detection tracking algorithm-based system for real-time video surveillance in low-end edge computing environments is introduced. The performance of methods based on deep learning algorithms, such as region-based convolutional networks, which have two stages for inferencing, has recently enhanced the accuracy of object detection. Single shot detector and you only look once (YOLO) are examples of one-stage detection algorithms that have been created at the price of some accuracy and can be used to real-time systems. To achieve good object detection performance and speed, high-performance hardware like a general-purpose graphics processing unit is necessary. In this study, this paper proposes an approach called N-YOLO which divides into fixed-size images used in the YOLO algorithm and merges detection results of each divided sub-image with inference results at different times using a correlation-based tracking algorithm. This approach can significantly reduce the amount of computation for object detection and tracking. Additionally, this paper suggests a system that may provide real-time performance in different edge computing contexts by adaptively managing the cycle of object detection and tracking.
[8] Suraj Beera et al., had proposed a Yolo V5-based Smart Cell phone Detector Reading, writing, viewing video lectures, taking online examinations, and participating in online meetings are just a few of the educational activities that online students participate in. The necessity for online activities, especially online conferencing, and learning, has grown significantly during this COVID-19 epidemic age, and it is now the only effective and cost-effective method for all types of work to continue. Their project, focuses on analyzing online learners’ attention during meetings on a video streaming platform using the YOLO V5 algorithm by criteria of object detection preferably mobile detection during online exams, in exam rooms or conference rooms, in shopping centers, or on the road for vehicle detection.
[9] Akalya Chellappa et al., they have implementing Fatigue Detection Using Raspberry Pi 3 using RasPi. The main factor in many highway accidents that result in severe bodily injuries, financial losses, and fatalities is driver inattentiveness. Major accidents can be avoided by implementing real-time driver sleepiness detection. The device, which is intended for four-wheelers, can identify whether a driver is drowsy or fatigued and can notify them to the situation. The suggested approach will make use of a 5-megapixel Raspbian camera to record the driver's face and eyes and evaluate the photos to identify driver weariness. The preprogrammed mechanism warns the motorist to maintain attention when it detects drowsiness by sounding an alarm. To determine the driver's alertness, the proposed method consists of many stages. The created warning message is in accordance with this output. The eye aspect ratio (EAR) is calculated after the blink duration of the driver has been detected using the Haar Cascade Classifiers. Using the cloud service of Ubidots and the Twilio API, the alert message and automobile plate number are finally sent to the mobile device of the concerned person. Raspbian (a Linux-based operating system) is employed for this Raspberry Pi 3.
[10] Md. Yousuf Hossain al., had proposed IOT based Real-time Drowsy Driving Detection System for the Prevention of Road Accidents. One of the biggest causes of traffic accidents is sleepy driving. Statistics show that sleepy driving causes a significant number of traffic accidents that result in serious injuries and fatalities. In order to prevent drivers from becoming fatigued while operating a vehicle and causing accidents, numerous studies have been conducted on the development of systems that can detect driver drowsiness and inform the driver in advance. However, these assessments are greatly influenced by the road's construction, the type of vehicle, and the driver's expertise. Some traditional approaches employed vehicle-based measures to design their systems. Other methods, which tend to be more accurate at detecting driver tiredness, use psychological measures in their systems. Additionally, there aren't many studies in existence that employ subjective assessments as the system's input; nonetheless, doing so can distract the driver and produce unclear results. In this research, their paper suggested a real-time, completely non-intrusive system. The eye closure ratio was the input metric employed by our suggested approach to identify driver tiredness. A buzzer is used to inform the driver if the eye closure ratio deviates from the desired ratio. In our system, the driver's eye images are captured using a Pi camera, and the whole thing is integrated using a Raspberry Pi.
[11] L. Thulasimani et al., had proposed a Real-Time Driver Drowsiness Detection Using OpenCV and Facial Landmarks. In recent years, one of the main contributors to car accidents worldwide has been driver weariness. According to large research, weariness is a factor in about 20% of all traffic accidents. Drowsy Driving may be incredibly risky; a lot of traffic accidents are caused by drivers who nod off and lose control of their cars as a result. But before a serious issue develops, early indicators of weariness and drowsiness can be identified. Driver sleepiness is a clear indicator of driver weariness and can be measured. In order to protect people and property, it is crucial to identify driver sleepiness. The goal of their project is to create a working prototype of a drowsiness detection system, which will alert the driver if it detects tiredness by monitoring the driver's eye closure, yawning, and head tilt.
[12] Dr A Ravi et al., had proposed Real Time Driver Fatigue Detection and Smart Rescue System. Today's population is growing quickly, causing 6.5 lakh accidents annually, many of which result in fatalities due to a lack of timely medical care. This study offers a cloud-based management platform and an automatic real-time driver fatigue detection system based on image processing. Internally, the proposed system uses Raspberry Pi-based Alert and Rescue systems. The Eye Aspect Ratio (EAR) is a precise and accurate method of detecting driver sleepiness that is used by the alert system to prevent accidents to some extent. When a motorist is detected to be drowsy, the system will notify them with a buzzer to wake them up. Even if an accident does occur, the vibration sensor that is in use will still pick it up, and the GPS Receiver Module will provide the location information of the accident site. The Ubidots technology, which is used by ambulance drivers to track down the location and go there instantly, simultaneously makes these details available in the form of a map, and IFTTT also uses this information to send the victim's parents a notification message. To communicate among themselves, drivers utilize an MSS app. By saving families in addition to lives, this strategy aids in lowering the death rate.
2. Overall System design
Power Supply: The power supply for this system is taken from the USB port of the vehicle. This powers on the Jetson Nano which approximately takes 15 seconds to boot. Then powering on the USB Camera.
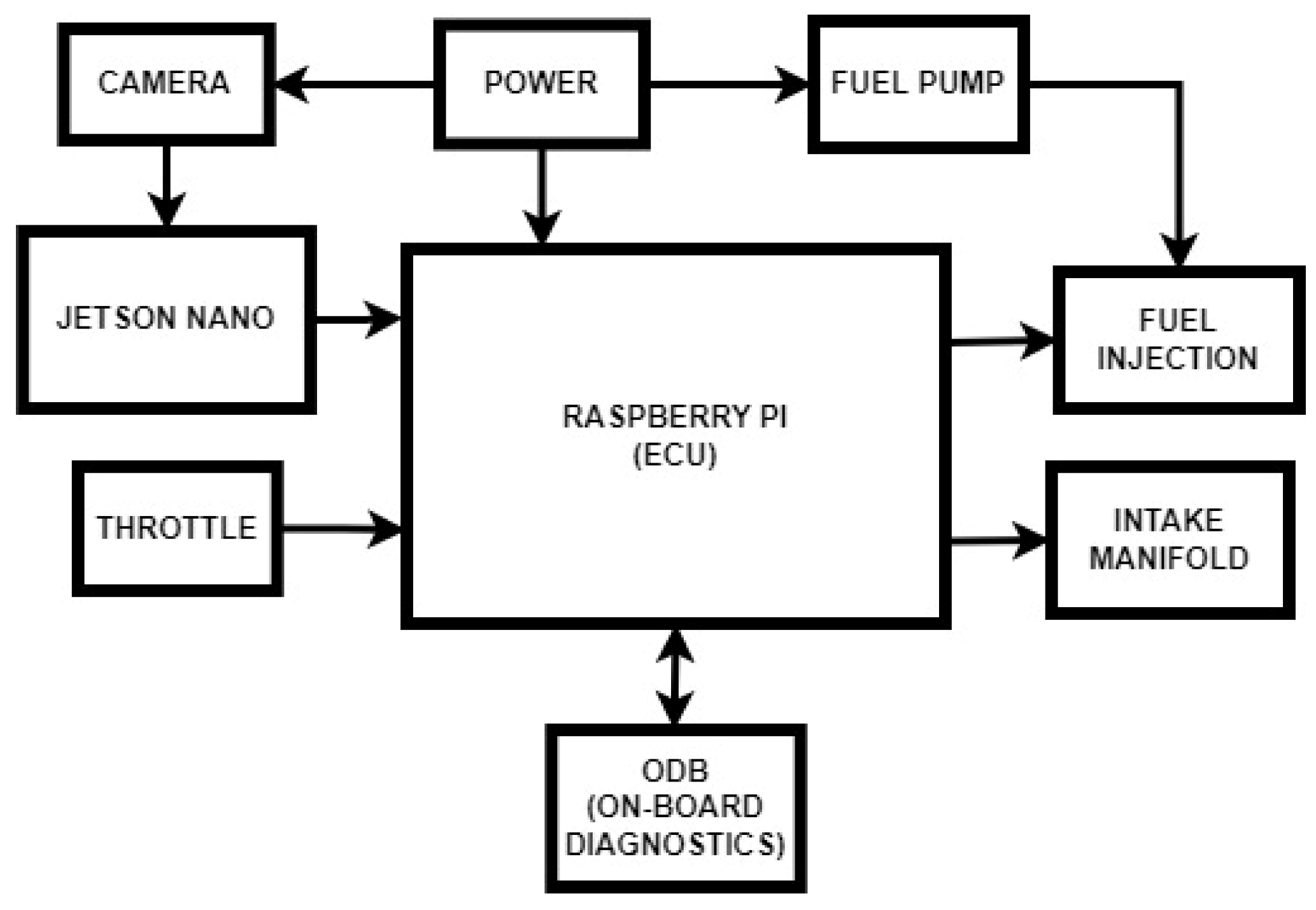
Figure 3.
1: Block diagram.
USB Camera: The camera records video in 1080p and feeds the input into the Jetson Nano using the USB interface.
Jetson Nano: The video input received by the Camera is processed. The acquired video is fed into two different algorithms.
The first algorithm is used to determine the driver drowsiness detection. It takes the facial co-ordinates and eye ratio (longitude and latitude). If its eye ratio is below the threshold value it detects drowsiness.
The second algorithm used is YOLO and it follows a 19x19 grid and checks whether the object is present in the grid. In our case cell phone and cigarette are the required objects. It is detected using convolutional neural network (CNN).
Once either of the signals get generated. This signal is fed into the ECU. For the time being the ECU is simulated using a Raspberry pi 4.
Buzzer: The warnings are given to the driver using the buzzer when he/she is drowsy/using cell phone or cigarette.
ECU: The ECU has data regarding the speed of the vehicle at any given point, when the speed of the vehicle is a above a certain limit and the signal from the Jetson Nano appears at the input at the ECU. The ECU switches to another mode of operation in which there exists a separate Look Up Table for Air Fuel Ratio. This table has reduced Fuel values for certain Air pressures and hence reduces the flow of fuel into the engine. The ECU also reduces the amount of air entering the engine and hence also reducing the combustion. Hence limiting the power.
Fuel Injector: The Fuel Injection is controlled via Pulse Width Modulation (PWM) generated by the ECU, the PWM sent by the ECU is based on the Look Up Table.
Air Intake Manifold: The amount of air entering the engine is regulated by the throttle of the vehicle which controls the Air Intake Manifold, this contains a valve which opens electronically via a motor, the signal to control the position of this valve comes via the ECU which reduces the amount of opening when Drowsiness or Cell phone or Cigarette is detected. Hence preventing the vehicle from over speeding.
Controller Area Network (CAN): The CAN (Controller Area Network) protocol is frequently used in automotive applications to facilitate communication between multiple electronic control units (ECUs) located inside a vehicle. CAN enables multiple modules, including the airbag control module, anti-lock brake system, engine control module, and transmission control module, to interact with one another, share data, and collaborate to offer a variety of functions in the car. With the help of CAN protocol, it will support multiple devices on a single bus, which can considerably lower the cost of wiring and component costs. Additionally, it features systems for automatic error detection and correction that guarantee the integrity of the data being communicated. The CAN protocol is widely used in systems for the aerospace industry, automotive industry, industrial automation, and medical equipment.
On-board Diagnostics: A system in a car called OBD (On-Board Diagnostics) is made to track and report on the operation of various systems and parts. The typical usage of OBD systems is to identify and report any problems or malfunctions related to the engines, transmission, emission levels, and various other subsystems. Modern OBD systems are frequently built on the CAN (Controller Area Network) protocol, which enables communication between different electronic control units (ECUs) in the car. In order to diagnose problems with the car, mechanics and technicians are able to access data from the OBD system by connecting a diagnostic instrument to the OBD port.
3.1. Software Requirement:
Raspberry Pi OS: Raspbian OS is operating system based on Debian Linux and is optimized to work efficiently with the Raspberry Pi computer.
Python: Python is a general-purpose computer programming language which can be used to create a variety of different programs. It has access to an extremely large set of libraries and extensions.
NumPy: NumPy is a library for python programming language which has support for vast multidimensional arrays and matrices with a collection of high-level mathematical function to operate on the arrays.
OpenCV: OpenCV stands for Open-Source Computer Vision. It is a library consisting of programming functions concerning Realtime computer vision. It is capable of processing handwriting, identifying objects, faces, etc.
Media Pipe: MediaPipe is a Framework for building machine learning pipelines for processing timeseries data like video, audio, etc.
3.2. Hardware Requirement:
Raspberry Pi 4: Raspberry Pi 4 include a high-performance 64-bit quad-core processor which offers increases in processor speed, multimedia performance, memory, and connectivity.
NVIDIA Jetson Nano: The Jetson Nano contains a 64-bit quad-core Arm Cortex-A57 CPU that operates at 1.43GHz, a 128-core NVIDIA Maxwell GPU that can perform 472 GFLOPs (FP16), 4GB of onboard 64-bit LPDDR4 RAM, 16GB of onboard eMMC storage, and Linux.
Passive Buzzer: A buzzer is a device that converts electrical audio signals into mechanical sound signals.
IRF540 N: IR MOSFET battery-powered devices, DC motors, inverters, SMPS, lighting, load switches, and illumination.
USB Camera: Crisp HD 720p/30 fps video calls with a diagonal 55° field of vision and auto light correction compatible with well-known systems like Skype and Zoom.
Fuel injector: Fuel injection system is able to accurately provide the required amount of fuel.
Fuel Pump: The fuel pump is a crucial component of your car's engine that transports gas from the tank via the fuel system to the engine. Fuel is injected into the cylinders, where it ignites after passing through a fuel filter and a fuel filter.
Fuel Rail: The fuel injectors installed directly on the fuel rail receive fuel from the fuel rail.
Air Intake Manifold: The intake manifold makes sure that the air entering the engine is divided equally among all of the cylinders. At the initial phase of combustion, this air is utilized. Moreover, the intake manifold assists in cylinder cooling, which keeps the engine from overheating.
4. METHOD
Initially when the car is turned on, the device gets power from the USB port present in the car. This is used to power ON the Jetson Nano Microprocessor, which powers ON a camera which captures video in real time and feeds it back into the Jetson Nano. In the Jetson Nano two image processing algorithms run simultaneously.

Figure 4.
2: Flow chart.
The first algorithm is used to determine the driver drowsiness. The second algorithm determines whether the driver is using a cell phone or smoking a cigarette while driving.
The first algorithm localises the face and detects the key facial structure of it. The facial detection is done through OpenCV and NumPy and mainly a library called Mediapipe. The face is continuously captured using the USB camera, and the Mediapipe gives the facial landmarks of the driver using which the landmark indices of both eye area are highlighted in the frame. Now to check for drowsiness the eye aperture is calculated using both the horizontal distance of the eye and the distance between the upper and lower eyelid, both the distances are acquired using the facial coordinates and using Euclidean distance. If the eye aperture ratio is less than a certain threshold value, a timer is initiated up to three seconds after which a sound alarm is turned on to alert the driver. This alarm is sounded using a small buzzer which is used to bring back the attention of the driver back to the road.
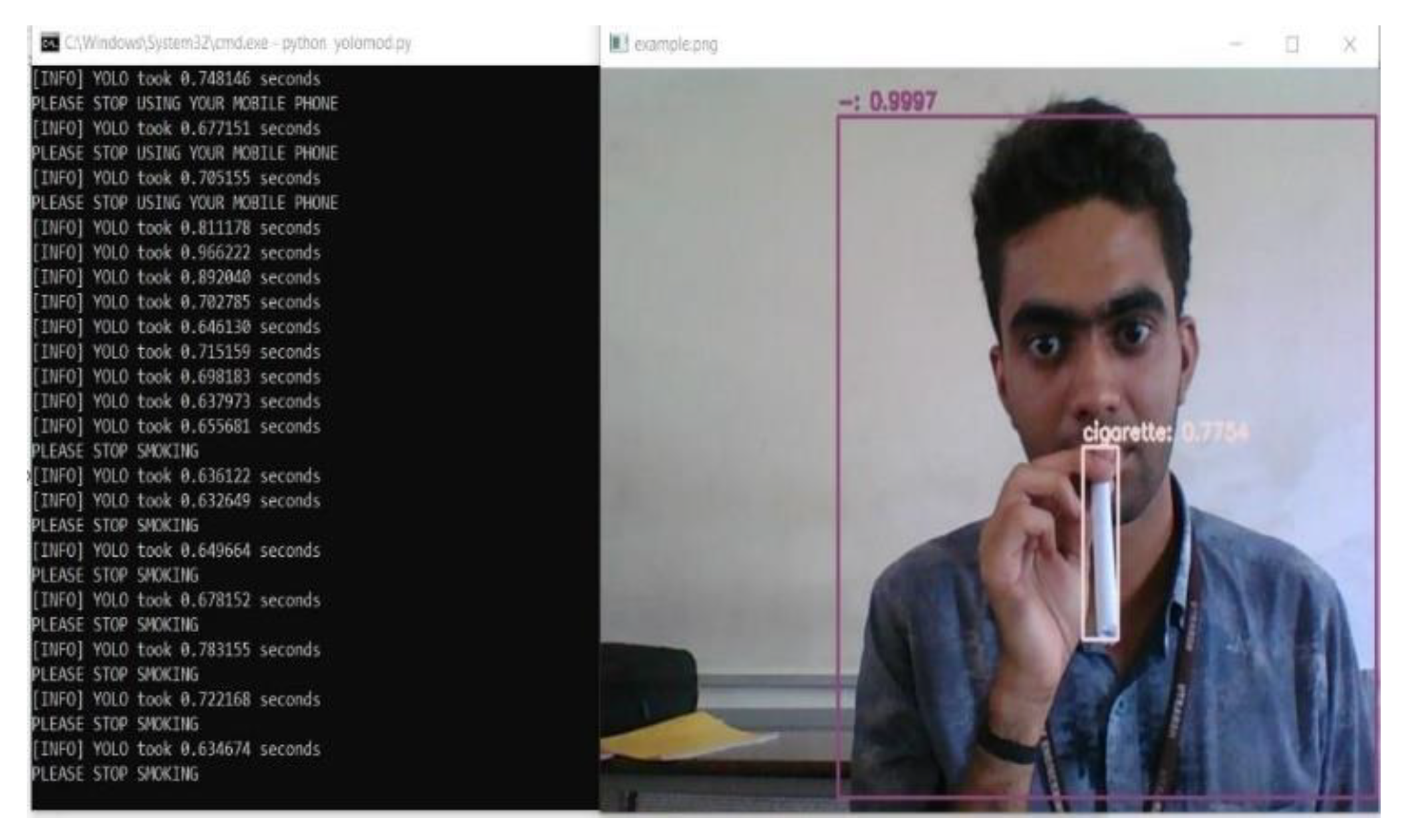
The second algorithm that runs in the Jetson Nano is used to determine the usage of cell phone or a cigarette while driving. The same image acquired before for drowsiness is also given to this algorithm from the USB cam. The algorithm is called YOLO (You Only Look Once), here the image is converted it into a 19X19 grid image that will give the feature of the multiple objects within a single image. Then using the OpenCV the input image data points are read and given to specified image in a NumPy array. As a result, image with a rectangular box (boundary box) is obtained using YOLO and the object is labelled using COCO data sets. But in this case the YOLO algorithm is used to only detect two objects that is, a cell phone and a cigarette. If the driver is using a cell phone or cigarette when driving the YOLO algorithm detects the objects and issues a warning using the same buzzer as the previous algorithm to alert the driver.
The speed of any vehicle is controlled by the driver using the throttle, this information is relayed to the brains of the vehicle, the ECU. The ECU receives the information as to how much the air intake has to be increased and sends a signal to the air intake manifold to do the same. Concurrently the ECU also needs to increase the Fuel injection rate as the throttle increases, this is achieved using an Air Fuel ratio lookup table. Both the signals are in PWM format and hence Duty cycle is used to control the throttle of the vehicle.
In extreme cases even after the sounding of alarms, if the driver is still drowsy or distracted on his/her cell phone or smoking a cigarette. The Jetson Nano generates a signal which is fed into the ECU of the vehicle. If the speed of the vehicle is above a certain limit, the ECU will reduce the fuel injection and air intake, hence controlling the speed of the vehicle rather than turning it off completely. This achieved by reducing the duty cycle of both the Air Intake Manifold and hence reducing the air entering the engine and also the Fuel Injectors which reduces the fuel being squirted into the engine. Hence the speed of the vehicle is regulated and the driver is not allowed to overspeed when driving impaired.
5. RESULT
The camera starts taking input of the face of the driver which is then processed for drowsiness (as shown in Figure 5.1). The image is also processed for cell phone usage (as shown in Figure 5.2) and smoking of cigarette (as shown in Figure 5.3). If both the processes yield a negative result the cycle continues until the car is turned off. If the processes yield a positive result the buzzer is sounded which alerts the driver to take control of the vehicle and asses his/her situation. Furthermore, if the driver is still drowsy or distracted after giving the warning, a signal is generated by the Jetson Nan and fed into the ECU. The ECU is simulated in this instance using a Raspberry Pi 4. Once this condition is achieved the driver can’t accelerate past a speed limit due to airflow restriction on the engine, which is achieved by PWM (Pulse Width Modulation) on the Intake Body and on the Fuel Injector. Compared with previous work were they only used 68 facial points to detect drowsiness, our use of 468 facial points is more accurate. There is a training set in place to detect even cigarettes, unlike other papers that only employed training sets to detect cell phones using YOLO. Finally, no one has integrated the three elements of drowsiness, smoking, and cell phone detection to regulate the speed of the vehicle in any of the papers mentioned above. By offering all these features, it is possible for people to drive safely in cars.
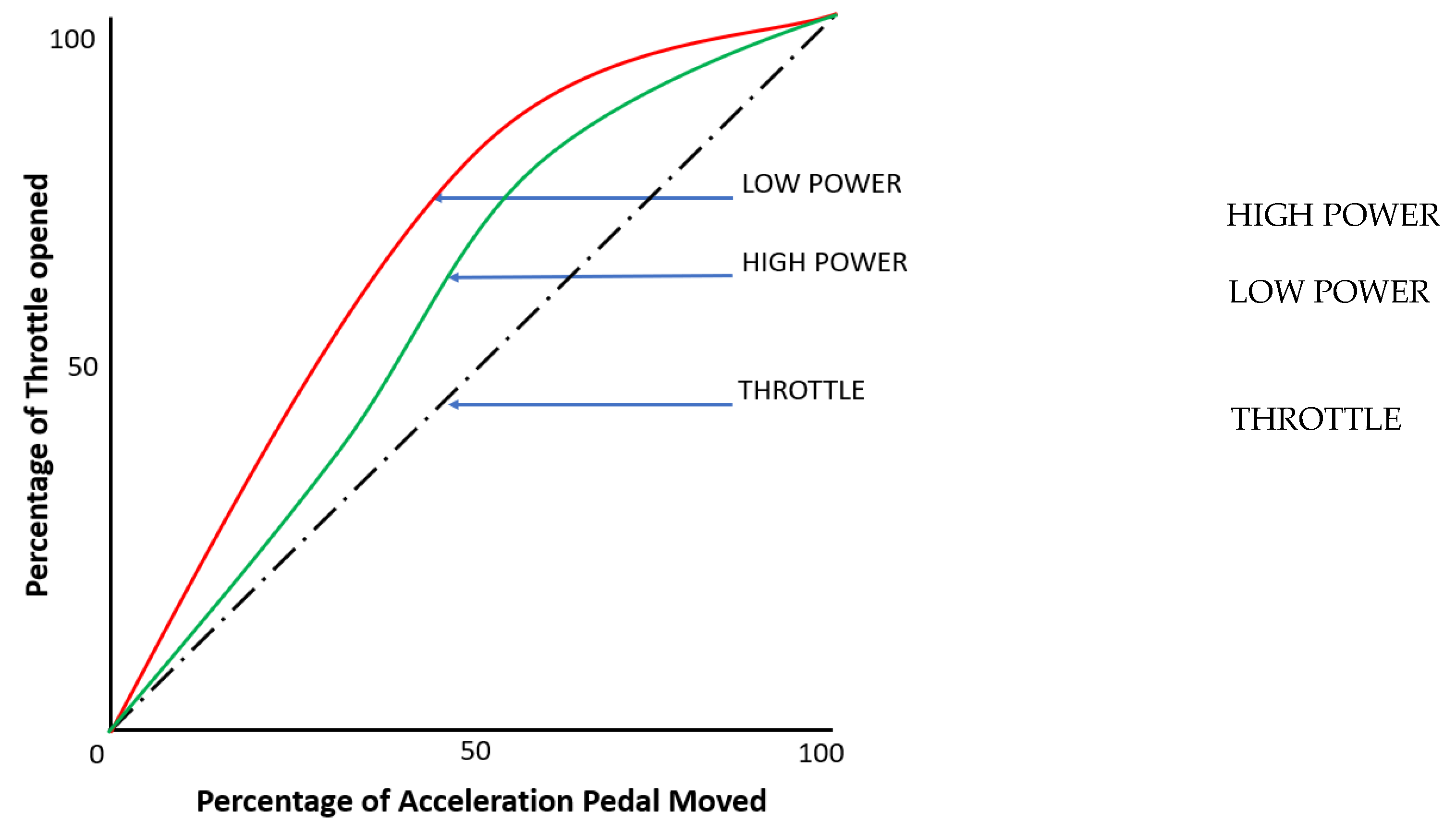
In the above graph, the x-axis shows the percentage of acceleration peddle moved, and the y-axis shows the percentage of throttle open. The dotted line indicates the actual throttle; the high-power output is shown by the red line, and the low-power output is shown by the green line. When the throttle is pressed, the output of the throttle valve opening in low power mode is slightly less when compared with high power. The opening of the throttle valve depends on the Acceleration. This signifies that vehicle control can be more efficient using low-cost controller systems.
6. CONCLUSION
This paper is mainly designed to be implemented in the trucking industry and help the driver stay alert when driving during long deliveries. The system warns the driver of drowsy driving and prevents the driver from using his/her cell phone or smoking a cigarette when driving. Helps the drowsy driver by warning and limiting overspeeding. This paper aims to make the roads a safer place for driving. In the future, we can also implement a camera to monitor the road and combine it with Artificial Intelligence (AI) to inform the driver about obstacles ahead and the minimum distance to be maintained to avoid colliding for better road safety.
References
- Mehta, Sukrit, et al. "Real-time driver drowsiness detection system using eye aspect ratio and eye closure ratio." Proceedings of international conference on sustainable computing in science, technology, and management (SUSCOM), Amity University Rajasthan, Jaipur-India. 2019.
- Phayde, D.; Shanbhag, P.; Bhagwath, S.G. REAL-TIME DROWSINESS DIAGNOSTIC SYSTEM USING OPENCV ALGORITHM. Int. J. Trendy Res. Eng. Technol. 2022, 06. [Google Scholar] [CrossRef]
- Chandan, G. , Ayush Jain, and Harsh Jain. "Real time object detection and tracking using Deep Learning and OpenCV." 2018 International Conference on inventive research in computing applications (ICIRCA). IEEE, 2018. [CrossRef]
- Potdar, Jayshri Sudhir, and Yashwant B. Mane. "Hardware Design and Development of Engine Control Unit for Four Cylinder Engine." 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA). IEEE, 2018. [CrossRef]
- Vijay, E. Vargil, et al. "Electronic control unit for an adaptive cruise control system & engine management system in a vehicle using electronic fuel injection." INTERACT-2010. IEEE, 2010. [CrossRef]
- Zhang, Liang, et al. "Fuel injection quantity fluctuation analysis and compensation control for multiple injections of common rail system." 2017 36th Chinese Control Conference (CCC). IEEE, 2017. [CrossRef]
- Jha, Sudan, et al. "Real time object detection and tracking system for video surveillance system." Multimedia Tools and Applications 80.3 (2021): 3981-3996. [CrossRef]
- Beera, Suraj, et al. "The Yolo V5 Based Smart Cell phone Detector." NVEO-NATURAL VOLATILES & ESSENTIAL OILS Journal| NVEO (2021): 3437-3455.
- Chellappa, Akalya, et al. "Fatigue detection using raspberry pi 3." International Journal of Engineering & Technology 7.2.24 (2018): 29-32.
- Hossain, Md Yousuf, and Fabian Parsia George. "IOT based real-time drowsy driving detection system for the prevention of road accidents." 2018 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS). Vol. 3. IEEE, 2018. [CrossRef]
- Thulasimani, L. , and Prithashasni SP. "Real time driver drowsiness detection using opencv and facial landmarks." Int. J. of Aquatic Science 12.2 (2021): 4297-4314.
- Ravi, A. , et al. "Real Time Driver Fatigue Detection and Smart Rescue System." 2020 International Conference on Electronics and Sustainable Communication Systems (ICESC). IEEE, 2020. [CrossRef]
Figure 5.1.
Drowsiness Detection.

Figure 5.2.
Cell Phone Detection.
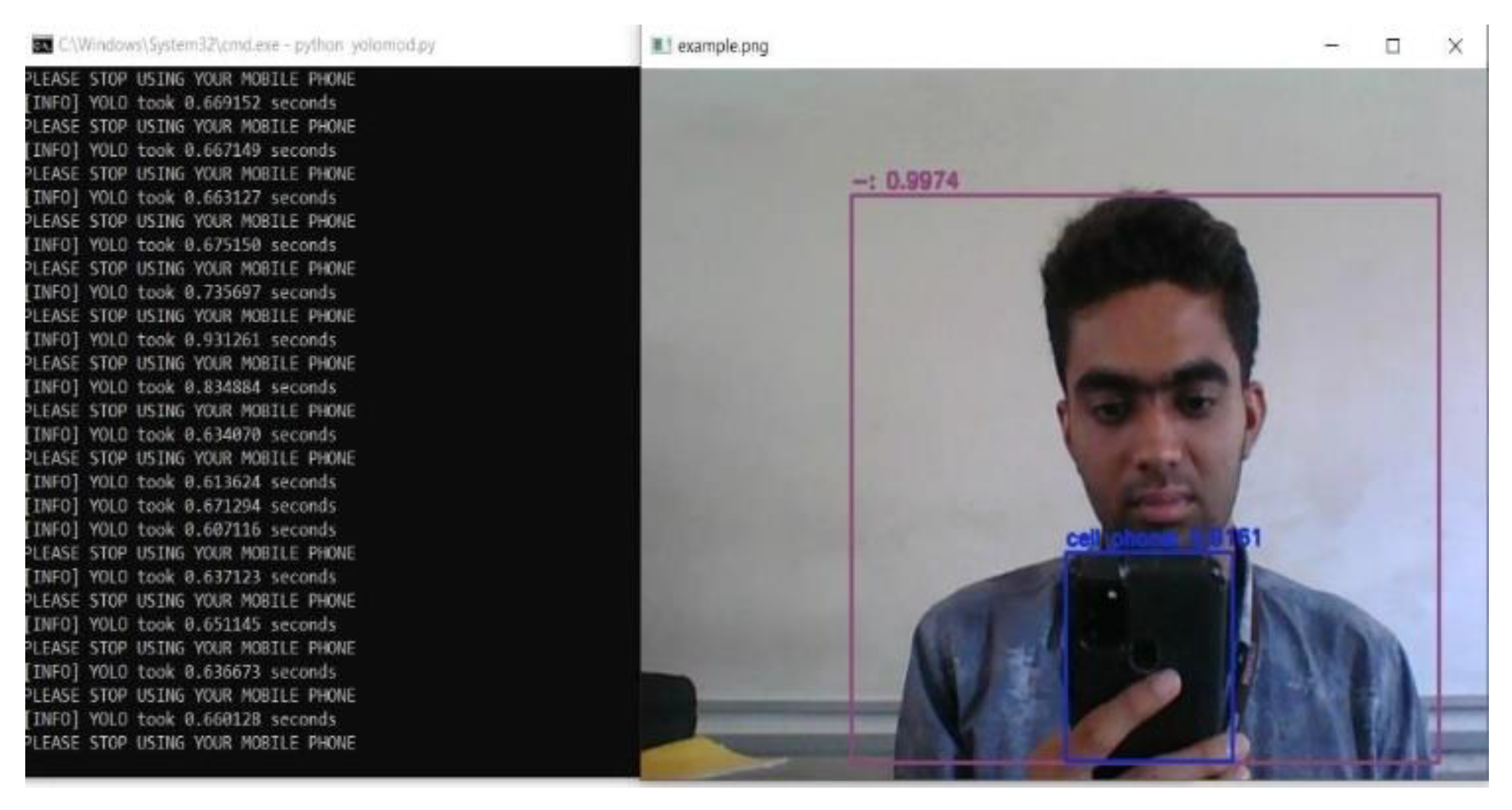
Figure 5.3.
Cigarette Detection.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



