
Submitted:
11 June 2022
Posted:
14 June 2022
You are already at the latest version
Abstract
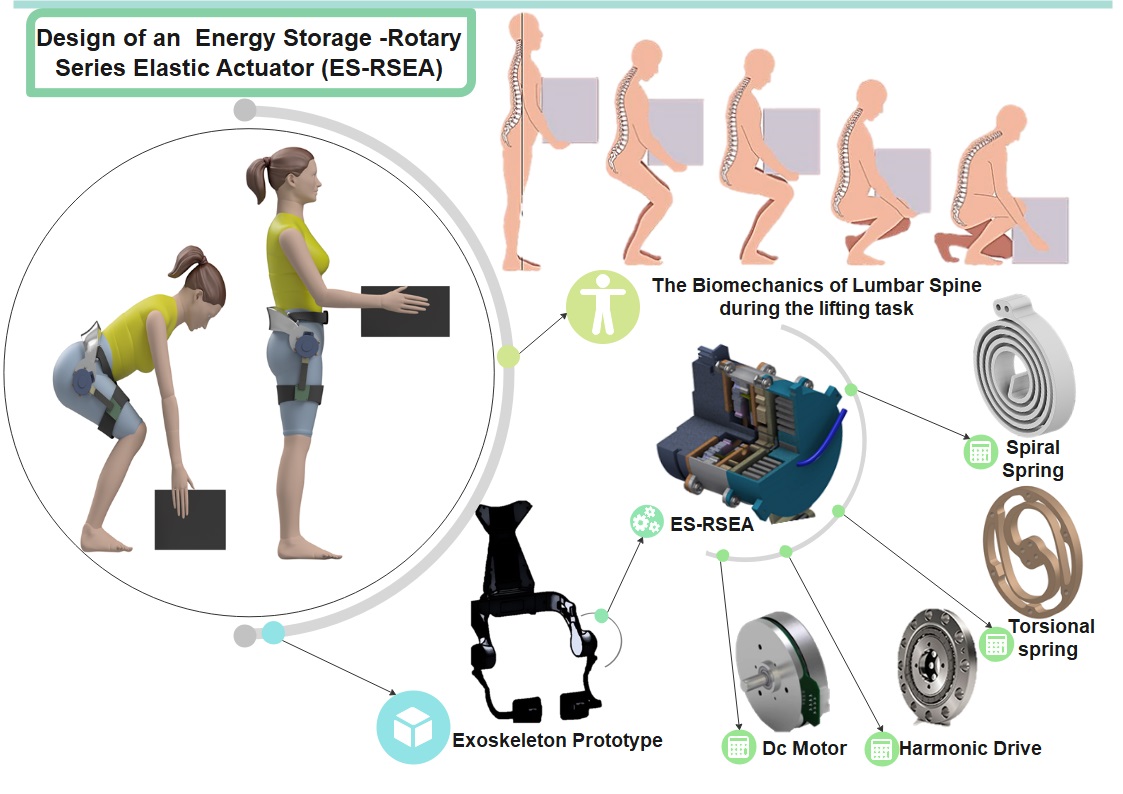
Lumbar support exoskeletons with active and passive actuators are currently the cutting-edge technology for preventing back injuries in workers while lifting heavy objects. However, many challenges still exist in both types of exoskeletons, including rigid actuators, risks of human-robot interaction, high battery consumption, bulky design, and limited assistance. In this paper, the design of a compact, lightweight energy storage device combined with rotary series elastic (ES-RSEA) is proposed for use in a lumbar support exoskeleton to increase the level of assistance and exploit the human bioenergy during the two stages of the lifting task. ES takes the responsibility to store and release passive mechanical energy while RSEA provides excellent compliance and prevents injury from the human body's undesired movement. The experimental tests on the spiral spring showed excellent linear characteristics (above 99%) with an actual spring stiffness of 9.96 Nm/rad. The results demonstrate that ES-RSEA can provide maximum torque assistance in the ascent phase with 66.6 Nm while generating nearly 21 Nm of spring torque during descent without turning on the DC motor. Ultimately, the proposed design can maximize the energy storage of human energy, exploit the biomechanics of lifting tasks, and reduce the burden on human effort to perform lifting tasks.
Keywords:
Augmentation
; exoskeleton
; lifting strategy
; lumbar support
; SEA
; series elastic actuator
; spiral spring
; machine design
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



