
Submitted:
15 January 2021
Posted:
18 January 2021
You are already at the latest version
Abstract
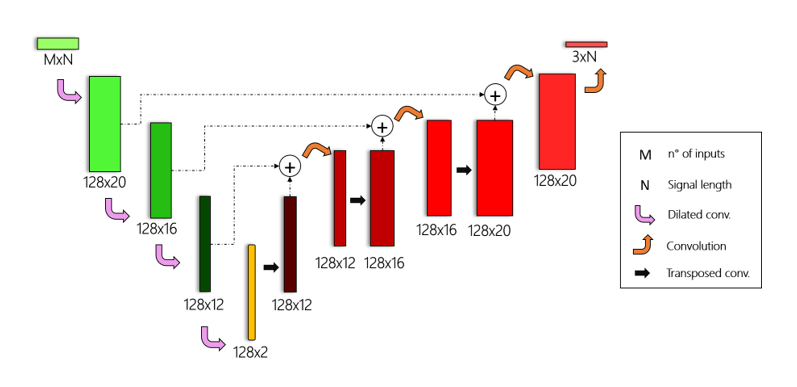
One of the main issues for underwater robots navigation is represented by the accurate vehicle positioning, which heavily depends on the orientation estimation phase. The systems employed to this scope are affected by different noise typologies, mainly related to the sensors and to the irregular noise of the underwater environment. Filtering algorithms can reduce their effect if opportunely configured, but this process usually requires fine techniques and time. This paper presents DANAE++, an improved denoising autoencoder based on DANAE, which is able to recover Kalman Filter IMU/AHRS orientation estimations from any kind of noise, independently of its nature. This deep learning-based architecture already proved to be robust and reliable, but in its enhanced implementation significant improvements are obtained both in terms of results and performance. In fact, DANAE++is able to denoise the three angles describing the attitude at the same time, and that is verified also on the estimations provided by the more performing Extended KF. Further tests could make this method suitable for real-time applications on navigation tasks.
Keywords:
attitude estimation
; autoencoders
; deep learning
; denoising
; Kalman filter
; underwater environment
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



