
Submitted:
15 November 2017
Posted:
16 November 2017
You are already at the latest version
Abstract
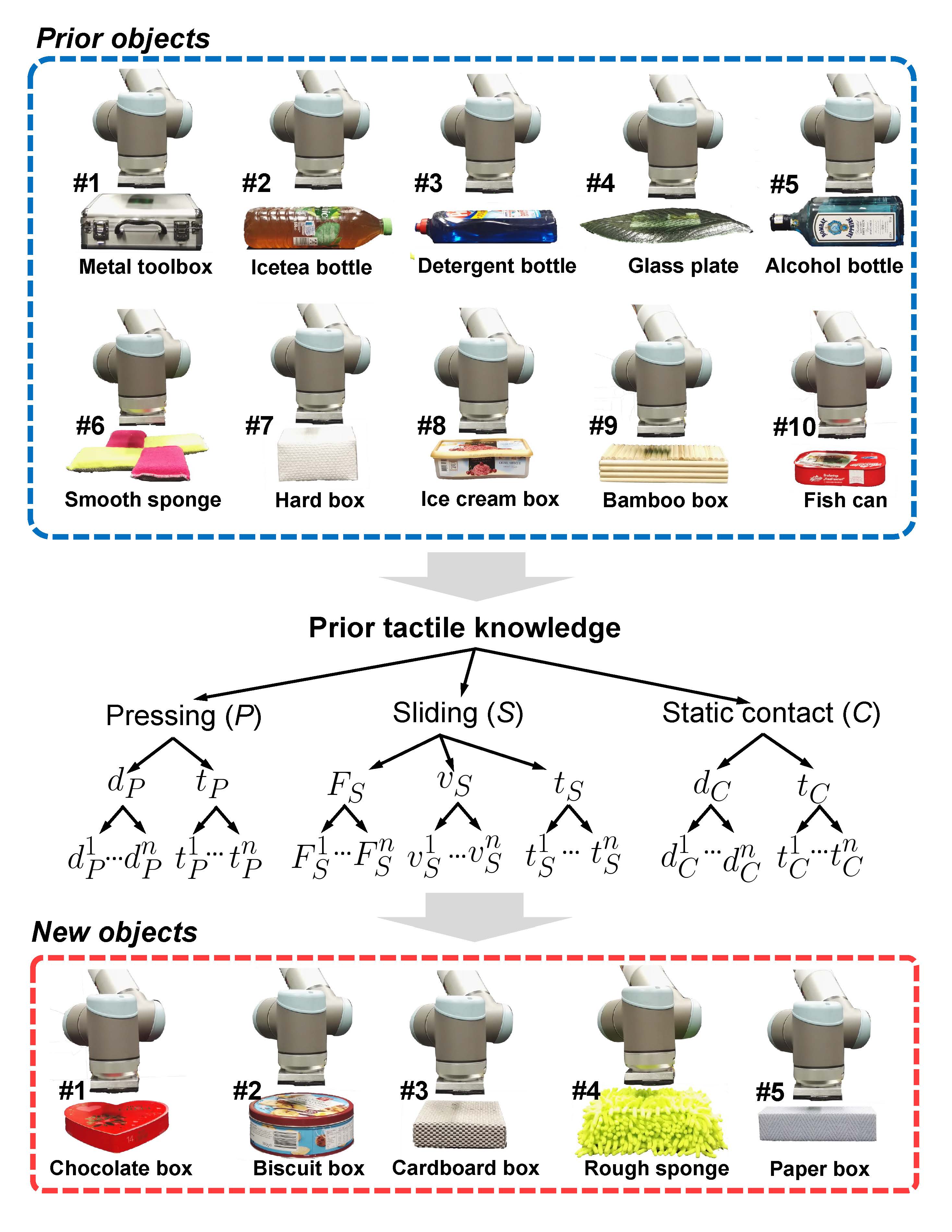
Reusing the tactile knowledge of some previously explored objects helps us to easily recognize the tactual properties of new objects. In this paper, we enable a robotic arm equipped with multi-modal artificial skin, like humans, to actively transfer the prior tactile exploratory action experiences when it learns the detailed physical properties of new objects. These experiences, or prior tactile knowledge, are built by the feature observations that the robot perceives from multiple sensory modalities, when it applies the pressing, sliding, and static contact movements on objects with different action parameters. We call our method Active Prior Tactile Knowledge Transfer (APTKT), and systematically evaluated its performance by several experiments. Results show that the robot improved the discrimination accuracy by around 10% when it used only one training sample plus the feature observations of prior objects. By incorporating the auxiliary features, the transfer learning improved the discrimination accuracy by over 20%. The results also show that the proposed method is robust against transferring irrelevant prior tactile knowledge (negative knowledge transfer).
Keywords:
tactile sensing
; artificial robotic skin
; active tactile object perception
; active tactile object learning
; active tactile transfer learning
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



