
Submitted:
20 March 2017
Posted:
20 March 2017
You are already at the latest version
Abstract
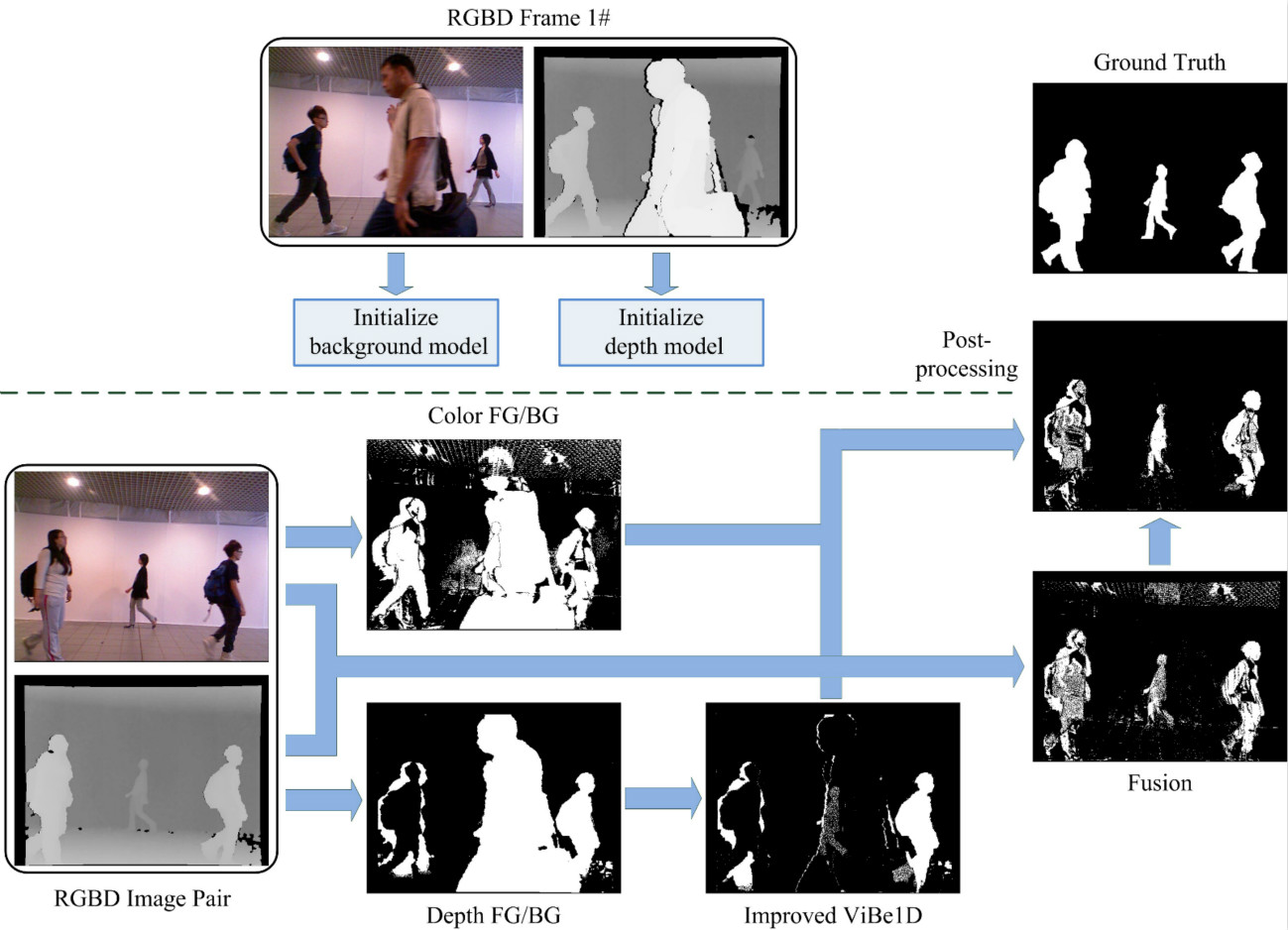
Depth-sensing technology has led to broad applications of inexpensive depth cameras that can capture human motion and scenes in 3D space. Background subtraction algorithms can be improved by fusing color and depth cues, thereby allowing many issues encountered in classical color segmentation to be solved. In this paper, we propose a new fusion method that combines depth and color information for foreground segmentation based on an advanced color-based algorithm. First, a background model and a depth model are developed. Then, based on these models, we propose a new updating strategy that can eliminate ghosting and black shadows almost completely. Extensive experiments have been performed to compare the proposed algorithm with other, conventional RGB-D algorithms. The experimental results suggest that our method extracts foregrounds with higher effectiveness and efficiency.
Keywords:
object detection
; background subtraction
; video surveillance
; Kinect sensor fusion
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



