Submitted:
25 June 2026
Posted:
26 June 2026
You are already at the latest version
Abstract
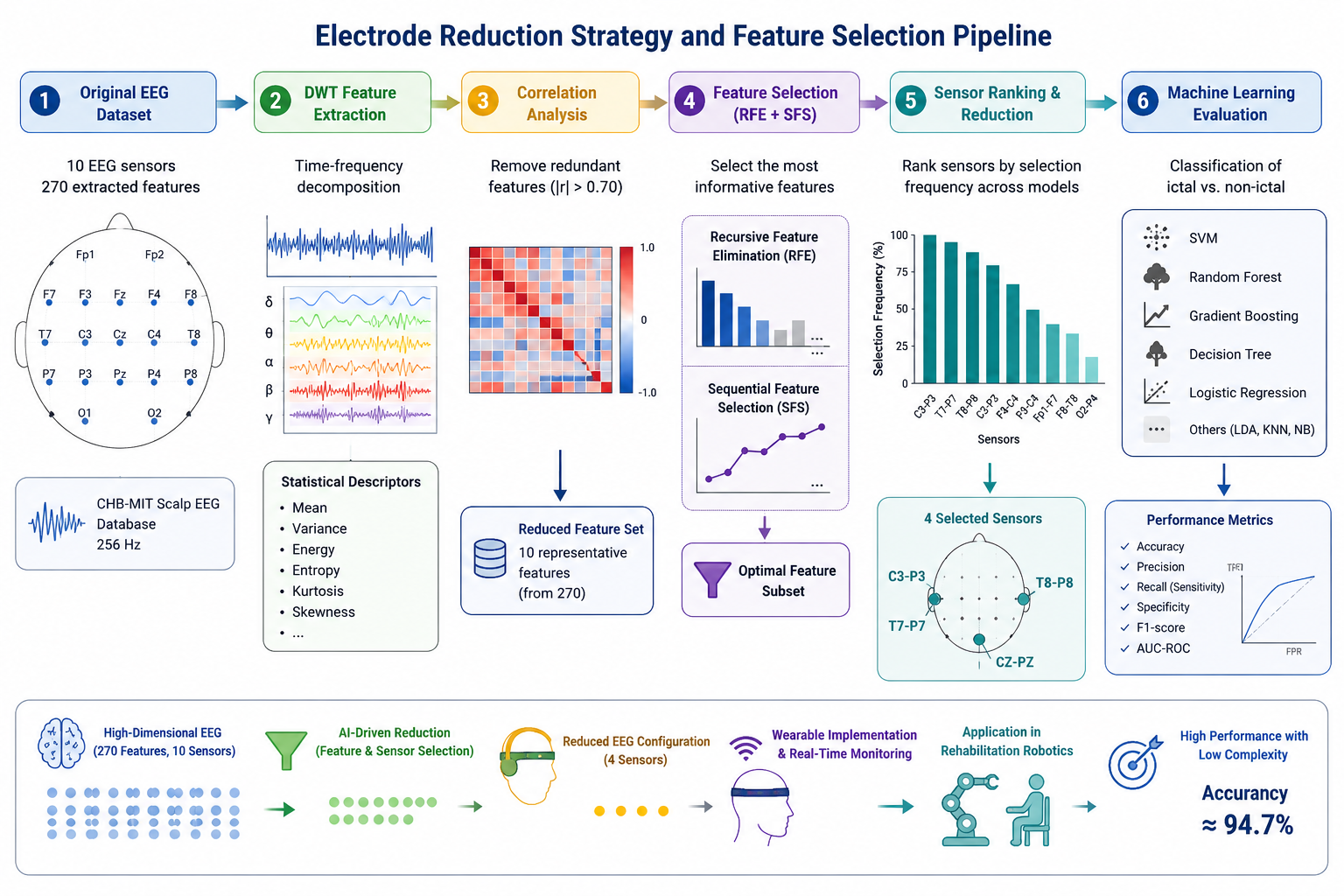
Personalized neurorehabilitation requires continuous monitoring of neurological con-ditions to support adaptive interventions and improve patient safety. Electroenceph-alography (EEG) has emerged as a valuable tool for capturing brain activity associated with neurological disorders; however, conventional EEG systems often rely on a large number of electrodes, limiting their applicability in wearable and long-term monitor-ing scenarios. This work proposes a reduced-channel EEG intelligence framework de-signed to enable adaptive human–machine interaction in future rehabilitation and as-sistive robotic systems through reliable real-time neurological monitoring. EEG re-cordings from the CHB-MIT Scalp EEG Database were processed through signal filter-ing, feature extraction based on the Discrete Wavelet Transform (DWT), correla-tion-based feature reduction, and feature selection using Recursive Feature Elimina-tion (RFE) and Sequential Feature Selection (SFS). Multiple machine learning algo-rithms, including Support Vector Machine (SVM), Random Forest, Gradient Boosting, Decision Tree, Logistic Regression, K-Nearest Neighbors, Naïve Bayes, and Linear Dis-criminant Analysis, were evaluated to distinguish ictal and non-ictal states while as-sessing the impact of feature and electrode reduction on classification performance. Experimental results demonstrated that the original feature space could be substan-tially reduced while preserving high classification accuracy. The experimental results demonstrated that reducing the system configuration from 10 to only 4 optimal chan-nels (C3–P3, T7–P7, T8–P8, and CZ–PZ) maintained high classification performance. In the final testing phase, the tree-based ensemble models achieved a peak accuracy of 94.74%, with the Random Forest Classifier (RFC) showing the most balanced perfor-mance across all evaluation metrics (0.95 for precision, sensitivity, and specificity). This demonstrates that high-performance seizure detection can be achieved with low-complexity architectures, enabling its integration into real-time rehabilitation robotics.
Keywords:
electroencephalography
; machine learning
; support vector machine
; seizure detection
; wearable systems
; neurorehabilitation
; assistive robotics
; adaptive rehabilitation
; personalized healthcare
; artificial intelligence
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



