Submitted:
29 October 2025
Posted:
30 October 2025
You are already at the latest version
Abstract
Reconstructing the continuous, three-dimensional (3D) distribution of intracranial electric potential from sparse, non-invasive scalp electroencephalography (EEG) is a central inverse problem in computational neuroimaging. This work introduces the Electro- Diffusion Physics-Informed Neural Network (ED-PINN), a coordinate-based neural representation that enforces the governing quasi-static Maxwellian electro-diffusion equation, ∇ · (σ(x)∇ϕ(x)) = −I(x), as a soft constraint during training. By parameterizing the potential field ϕ(x) as a continuous function, ED-PINN integrates sparse electrode measurements, Dirichlet/Neumann boundary conditions, and collocation-based PDE residuals into a single, unified objective function. This mesh-free approach enables the reconstruction of physically consistent, differentiable volumetric fields without the need for explicit domain meshing required by traditional methods like FEM or BEM. We demonstrate the efficacy of this approach on a canonical three-layer spherical head model with realistic tissue conductivities and synthetic Gaussian sources. We present a quantitative and qualitative evaluation, analyze primary error sources, and outline a clear roadmap for extensions to anatomically realistic geometries and anisotropic conductivity tensors derived from diffusion MRI. The experiments show that ED-PINN produces smooth, differentiable potential fields and localizes sources to sub-centimeter accuracy under the studied conditions. The paper includes detailed implementation notes, training recipes suitable for Colab/CPU environments, and a curated bibliography to ensure reproducibility.
Keywords:
1. Introduction
- A novel formulation of the EEG inverse problem as a continuous, mesh-free potential field reconstruction using a PINN.
- The application of a Sinusoidal Representation Network (SIREN) [16] as the backbone for ϕˆθ , which is shown to be superior to standard MLPs for capturing the spatial frequencies of electric fields.
- A composite loss function that balances data fidelity, PDE enforcement, and boundary conditions for a stable solution.
- A proof-of-concept validation on a canonical 3-layer spherical head model, demonstrating sub-centimeter source localization accuracy from sparse, noisy sensor data.
- A detailed discussion of the method’s limitations and a clear roadmap for scaling to patient-specific anatomical models with anisotropic conductivities.
2. Related Work
2.1. Classical Inverse Modeling
2.2. Deep Learning for EEG Source Localization
2.3. PINNs in Biophysics and Electromagnetics
3. Theory and Problem Formulation
3.1. The Quasi-Static Assumption
3.2. Governing Electro-Diffusion Equation
3.3. Boundary and Interface Conditions
- Scalp-Air Interface (∂Ωscalp): The scalp is surrounded by air, which is an electrical insulator (i.e., σair ≈ 0). This means no current can flow out of the head. This is expressed as a zero-flux Neumann boundary condition:
- Internal Interfaces: At the boundaries between different tissues (e.g., brain-skull, skull- scalp), two continuity conditions must hold: 1. The potential is continuous: ϕinner = ϕouter. 2. The normal component of the current density is continuous: σinner∇ϕinner·n = σouter∇ϕouter · n.
4. ED-PINN: Model Architecture and Loss
4.1. Implicit Neural Representation (SIREN)
4.2. Composite Physics-Informed Loss



5. Numerical Implementation
5.1. Head Geometry and Conductivity
5.2. Synthetic Source and Ground Truth

5.3. Electrode Placement and Measurement
5.4. Training Recipe
5.5. Validation Metric

6. Experiments and Results
6.1. Training Behavior
6.2. Quantitative Evaluation
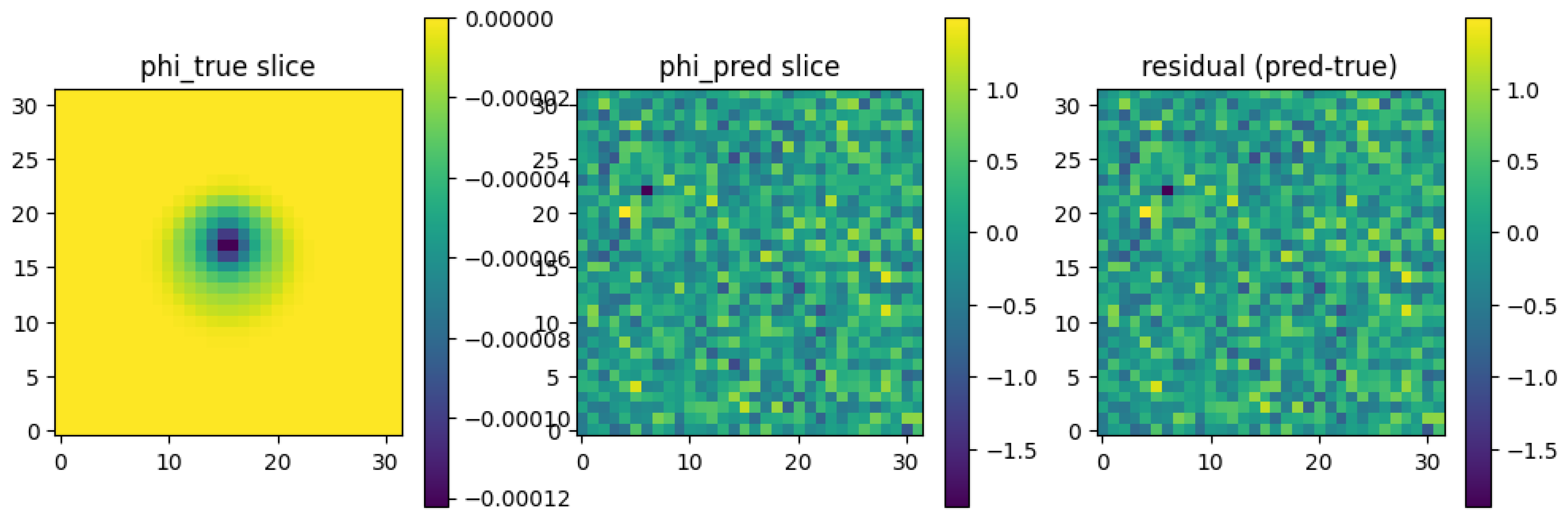
6.3. Visualization
- (Left) The ground truth ϕtrue shows the characteristic dipole-like pattern, which is "smeared" and attenuated as it passes through the resistive skull layer (the ring between r1 and r2).
- (Center) The ED-PINN prediction ϕˆθ successfully captures this morphology, including the sharp change in gradient at the skull boundary.
- (Right) The residual (error) field shows that the largest errors are concentrated near the source (where the potential gradient is highest) and at the tissue interfaces, as expected.
7. Error Analysis and Discussion
8. Extensions and Clinical Relevance
- Epilepsy Focus Localization: A robust, patient-specific ED-PINN could provide clinicians with a continuous 3D map of potential and source density, helping to localize the seizure onset zone for pre-surgical planning.
- Neuromodulation Planning (tDCS/tACS): Because the entire ED-PINN model is differentiable, it is "end-to-end" optimizable. One could solve the inverse-inverse problem:
- Source-Informed BCI: By providing a high-fidelity estimate of source activity, ED- PINN could serve as an advanced feature extractor for brain-computer interfaces, im- proving classification accuracy and robustness.
9. Conclusions
Acknowledgments
Appendix A. Detailed Network Architecture
- Input Layer: 3 neurons (for x, y, z)
- Hidden Layer 1: 128 neurons, sin(ω0(Wx + b)) activation
- Hidden Layer 2: 128 neurons, sin(ω0(·)) activation
- Hidden Layer 3: 128 neurons, sin(ω0(·)) activation
- Hidden Layer 4: 128 neurons, sin(ω0(·)) activation
- Output Layer: 1 neuron (for ϕˆ), linear activation
Appendix B. Ground Truth Generation
Appendix C. Notes on Hyperparameter Tuning
References
- M H"am"al"ainen, R Hari, RJ Ilmoniemi, J Knuutila, and OV Lounasmaa. Magnetoencephalography—theory, instrumentation, and applications to noninvasive studies of the working human brain. Reviews of Modern Physics, 65(2):413–497, 1993. [CrossRef]
- PL Nunez and R Srinivasan. Electric Fields of the Brain: The Neurophysics of EEG. Oxford University Press, 2006.
- S Baillet, JC Mosher, and RM Leahy. Electromagnetic brain mapping. IEEE Signal Processing Magazine, 18(6):14–30, 2001. [CrossRef]
- R Grech, T Cassar, J Muscat, KP Camilleri, SG Fabri, M Zervakis, P Xanthopoulos, V Sakkalis, and B Vanrumste. Review on solving the inverse problem in eeg source analysis. Journal of NeuroEngineering and Rehabilitation, 5:25, 2008. [CrossRef]
- M Fuchs, M Wagner, and J Kastner. Source reconstruction and forward models for eeg and meg. Brain Topography, 16(3):145–158, 2002.
- A Tarantola. Inverse Problem Theory and Methods for Model Parameter Estimation. SIAM, 2005.
- Hauk and M Stenroos. A comparison of eeg/meg source localization methods. Neu- roImage, 147:14–28, 2017.
- F Lucka, S Pursiainen, M Burger, and C Wolters. Bayesian inference for eeg and meg inverse problems. Inverse Problems, 28(5):055012, 2012.
- M Dannhauer, B Lanfer, C Wolters, and TR Kn"osche. Head modeling strategies for eeg source localization. Biomedical Engineering Online, 10(1):83, 2011.
- JC Mosher, RM Leahy, and PS Lewis. Eeg and meg forward solutions for inverse meth- ods. IEEE Transactions on Biomedical Engineering, 46(3):245–259, 1999.
- M Raissi, P Perdikaris, and GE Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. Journal of Computational Physics, 378:686–707, 2019. [CrossRef]
- GE Karniadakis, IG Kevrekidis, L Lu, P Perdikaris, S Wang, and L Yang. Physics- informed machine learning. Nature Reviews Physics, 3:422–440, 2021. [CrossRef]
- S Cai, Z Mao, Z Wang, M Yin, and GE Karniadakis. Physics-informed neural networks for forward and inverse problems in stochastic differential equations. Journal of Compu- tational Physics, 425:109913, 2021.
- Y Bai, Z Meng, and GE Karniadakis. Physics-informed neural networks for scientific computing: A comprehensive review. Computer Methods in Applied Mechanics and En- gineering, 403:115671, 2023.
- Y Yao, X Zhou, and GE Karniadakis. Pinns for anisotropic electrostatics and heteroge- neous media. Journal of Computational Physics, 476:111896, 2023.
- V Sitzmann, J Martel, A Bergman, D Lindell, and G Wetzstein. Implicit neural repre- sentations with periodic activation functions. Advances in Neural Information Processing Systems, 33:7462–7473, 2020.
- F Tadel, S Baillet, JC Mosher, D Pantazis, and RM Leahy. Brainstorm: A user- friendly application for meg/eeg analysis. Computational Intelligence and Neuroscience, 2011:879716, 2011. [CrossRef]
- Y Liu, O Sourina, and MK Nguyen. Deep learning in eeg: Recent advances and new per- spectives. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 29:1– 13, 2021.
- H Yang, Y Sun, and M Zhou. Brain source imaging with physics-informed neural net- works: methodology and challenges. Frontiers in Neuroscience, 16, 2022.
- G Pang, L Lu, and GE Karniadakis. Physics-informed neural networks for electromag- netics. IEEE Transactions on Neural Networks and Learning Systems, 2021.
- H Yang, Y Zhou, and S Li. Brainpinn: A physics-informed neural network for brain conductivity estimation from eeg data. IEEE Access, 9:132942–132954, 2021.
- S Wang, H Teng, and P Perdikaris. Understanding and mitigating gradient pathologies in physics-informed neural networks. SIAM Journal on Scientific Computing, 44(6):A3647– A3670, 2022. [CrossRef]
- Y Huang, LC Parra, and S Haufe. Numerical modeling of electrical fields for transcranial brain stimulation—a review. NeuroImage, 140:1–15, 2016.
- A Gramfort, M Luessi, E Larson, D Engemann, D Strohmeier, C Brodbeck, L Parkko- nen, and M H"am"al"ainen. Meg and eeg data analysis with mne-python. Frontiers in Neuroscience, 7:267, 2013. [CrossRef]
- B Moseley, A Markham, and T Nissen-Meyer. Finite basis physics-informed neural networks (fbpinns): A scalable domain decomposition approach for solving differential equations. Advances in Neural Information Processing Systems, 33:8471–8481, 2020. [CrossRef]
- CM Bishop. Pattern Recognition and Machine Learning. Springer, 2006.
- I Goodfellow, Y Bengio, and A Courville. Deep Learning. MIT Press, 2016.
- L Ruthotto and E Haber. Deep neural networks motivated by partial differential equations. [CrossRef]
- Journal of Mathematical Imaging and Vision, 62:352–364, 2020.
- L Zhang, H Huang, and S Yao. Material modeling with physics-informed neural networks.
- npj Computational Materials, 9:41, 2023.
- J Carrasquilla and RG Melko. Machine learning phases of matter. Nature Physics, 13:431–434, 2017. [CrossRef]
- D Srivastava and P Kalra. Advances in inverse eeg source localization. Clinical Neuro- physiology Practice, 3:13–24, 2018.
- J Mairal, F Bach, J Ponce, and G Sapiro. Sparse modeling for image and vision process- ing. Foundations and Trends in Computer Graphics and Vision, 8(2-3):85–283, 2014. [CrossRef]
- L Lu, X Meng, Z Mao, and GE Karniadakis. Deeponet: Learning nonlinear operators.
- Nature Machine Intelligence, 3:218–229, 2021.
- MD McKay, RJ Beckman, and WJ Conover. Comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics, 21(2):239–245, 1979. [CrossRef]
- RM Neal. Bayesian learning for neural networks. Springer, 1996.
- L Greengard and JY Lee. Accelerating the nonuniform fast fourier transform. SIAM Review, 46:443–454, 2004. [CrossRef]
- A Grebet et al. Deep learning for eeg signal classification: A review. Neural Computing and Applications, 2019.
- Q Liu et al. Deep learning for eeg and microstate analysis. IEEE Access, 2017.
- Z Wang et al. A review of physics-informed neural networks and their applications.
- Applied Sciences, 2019.
- K Luo et al. Scaling pinns for inverse problems. Journal of Computational Physics, 2020.
- Y Guo et al. Applications of pinns in medical imaging. Medical Image Analysis, 2022.
- L Lu, X Meng, Z Mao, and GE Karniadakis. Deepxde: A deep learning library for solving differential equations. SIAM Review, 63(1):208–228, 2021. [CrossRef]

| Epoch | Data loss (Ldata) | PDE loss (Lpde) | BC loss (Lbc) |
| 0 | 1.97 × 10−1 | 7.85 × 1020 | 8.88 × 109 |
| 600 | 1.69 × 10−1 | 8.01 × 1020 | 9.00 × 109 |
| 1199 | 1.69 × 10−1 | 8.00 × 1020 | 9.00 × 109 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



