Submitted:
21 June 2025
Posted:
24 June 2025
You are already at the latest version
Abstract
Due to the increasingly complicated urban building structure and the rising occurrence of emergent events, the on-duty-to-road processing for an urban fire movement has come up against severe challenges for time response and road intelligence. To achieve this, the paper puts forward a new adaptive diffusion spatiotemporal graph neural network framework based on the NFIRS-PDR (National Fire Event Reporting System-Vehicle Scheduling Record) data, to achieve dynamic optimization of vehicle allocation plans of urban fire incidents. Based on the traditional ST-GCN and DCRNN, the model makes the following key contributions: (1) The dual-channel diffusion module is proposed to simultaneously model the directed traffic flow and regional risk in urban roads. (2) The timing attention gating mechanism is used to dynamically capture the law of the time dependence of sudden fire and the law of high-risk period; (3) The scheduling perception reinforcement feedback mechanism is introduced, a dynamic resource constraint learning path based on the Q-learning constraint is learnt in the training process to enhance the model of the accessibility and coverage of firefighting vehicles. The global graph structure is generated dynamically as a function of road connectivity and fire station arrangement and each node contains local history information of events as well as the regional risk obtained in advance from the NFIRS statistical model. The proposed AD-STGNN model has prominent advantages compared with the existing methods including the ASTGCN, ST-MetaNet and GraphSARL, its reduction rate on average scheduling time is up to 14% ), which can greatly improve the efficiency of emergency response.
Keywords:
urban fire dispatch
; spatiotemporal graph neural network
; adaptive diffusion
; reinforcement learning
1. Introduction
With the development of global urbanization, population density, number of buildings, and infrastructure complexity are increasing, which further complicating the urban fire protection. Fire is one of the most frequent and harmful urban emergencies, which not only endangers the safety of the life and property of the residents, but also is a test to the response capacity of the urban public service system [1]. For treatment of fire disaster, especially the golden rescue time decides success or failure of rescue, the quick and accurate dispatch of fire fighting vehicles is the magic weapon for improving weigh in ratio. Consequently, an intelligent dispatching system with the ability to sense the dynamic status of the city in real time and rapidly determine resource paths, is the core node of the smart city security management system.
Although some cities have successively implemented smart navigation operation system to aid the decision-making of fire fighting in the past few years, the current majority of scheduling strategies are limited to static heuristic rules, such as the shortest road distance first (or the closest road distance first). These approaches work well for scenarios involving average traffic flows, constant fires densities, or point-to-point concurrent events. Especially for the peak time or a special geographical environment, considering the geographical distance between the disaster site and the rescue site is not enough to effectively predict the response time, results in problems such as misallocation of resources and congestion of the site, finally reduce the overall rescue quality [2]. The scheduling scheme is difficult to be competent with the diversified emergency scenarios of modern cities if it cannot react to environment change real-time and resource dynamic constraint.
The spatiotemporal heterogeneity of an urban fire event is general, and the occurrence of fires and their size are quite different in different urban regions and in different time slots. Fires, for instance, are more common in commercial areas and daytime, while residential areas and nighttime or the winter tend to be riskier. The average arrival time for the traffic bottleneck area is significantly larger than that of the well-connected area [3]. Moreover, the historical fire alarm data presents clear spatial clustering and temporal periodicity laws and the high-dimensional coupling relationship of the problem will further strengthen the uncertainty of the scheduling strategy. Thus, it is challenging to capture complex spatiotemporal dependencies among different event types by mere static-based graph structures or time series-based models and a joint model which can adaptively model spatial graph topology and event time series would be essential to facilitate a more intelligent and predicting scheduling decision-making system [4].
During urban fire dispatching, fire risk does not uniformly distribute but spreads over the neighbouring areas with geographical location, population population or building structure. For instance, if a region is on fire, the likelihood that nearby risky regions will also catch fire increases abruptly, also known as a “risk spread” effect. Traditional GNNs are unable to properly encode this heterogeneous and bidirectional neighborhood propagation relationship [5]. In particular, the adaptive diffusion graph convolution operation can not only model the real traffic flow, but also adaptively tailor the risk perception intensity among areas through a learnable diffusion kernel. Such a mechanism can be introduced into the fire dispatching model, which can improve the ability of the model to forecast potential fire areas in the future, and also improve the model’s ability to look ahead to sudden risks and responses, improving the sensitivity and pre-response ability of dispatching work as a whole.
2. Related Work
Zhu et al. [6] developed an estimation model of Total Effective Coverage Area (TECA) to evaluate the system-wide impact of congestion on fire response capability. Using 3,226,000 samples obtained from the Internet maps collected from 6,625 POI data, the simulation result indicated: the traffic jams and the poor road network (there is a single bridge for rivers, etc.) will seriously weaken the coverage area of fire, TECA of 7.63 km². Senapati et al. [7] reduced the notification time of fire alarms by forwarding the messages over the vehicle’s mobile network and allowed the moving vehicle to promptly transfer fire information at the incident scene to the surrounding vehicles and dispatching centers. Rangel et al. [8] presented a demand-based joint optimization model of emergency vehicle dispatch and real-time traffic signal controls to solve environmental emergency dispatch problem of smart cities. By constructing a multi-objective linear programming model considering the elements such as the types of different vehicles, traffic accidents and signal light allocation, the joint optimization of the dispatch path and the traffic condition is achieved.
Liu et al. [9] proposed the Stingy-Interchange (SI) heuristic and it outperforms the commercial solver Gurobi in both synthetic and real city data in terms of solving larger instances. Chen et al. [10] combined with urban POI (Point of Interest) data with the location optimization of fire stations, and considered the actual travel time and the regional discrepancy of demand. In this paper, we took the city- level empirical analysis in Zhengzhou as an example land, realized the optimization of the site layout closer to the actual operation based on the regional per capita population density, the road time of road traffic and the demand type of the events.
Kiran et al. [11] analyzed block-level fire incident and fire response data from July 2019 to February 2023 in Kathmandu to provide an in-depth assessment of the coverage capacity of existing fire stations and identify potential new sites. The study found that the vast majority of districts failed to access fire services within a 5-minute response time, with some neighborhoods exceeding 10 minutes. Based on the street network accessibility analysis and GIS tools, some optimal site selection suggestions are put forward according to the response time and population distribution, so as to improve the coverage efficiency and response speed. There are still many limitations in the existing methods when coping with the dynamic urban environment: for example, ASTGCN and ST-MetaNet rely on static adjacency matrices, which are difficult to adapt to sudden road network changes; Most models ignore the diffusion characteristics of non-directional fire propagation between regions. Even if reinforcement learning is introduced, such as GraphSARL, its graph structure is fixed during the training stage, which makes it difficult for the strategy to respond to environmental mutations in real time.
3. Methodologies
3.1. Model Construction and Proliferation Mechanisms
In order to accurately model the spatial heterogeneity and risk diffusion process of urban fire dispatch, we first abstract the urban area into a dynamic graph structure . Nodes represent different neighborhoods or fire stations, and edges represent traffic connections and potential risk impacts between areas. Since the traffic flow in the city is directional, and the fire risk diffusion has the characteristics of non-directional propagation, we introduce a dual-channel diffusion mechanism to model these two types of information separately.
To this end, we construct two diffusion matrices: one is the directed diffusion matrix , which is used to describe the movement of resources under the guidance of traffic direction; The other is the Undirected Diffusion Matrix , which captures the co-occurrence risk propagation of fire incidents across adjacent areas. To use these two diffusion modes together, we define an adaptively weighted fusion diffusion nucleus as shown in Equation 1:
where is a learnable coefficient that balances the importance of directed traffic diffusion and undirected risk diffusion. The Softmax function is used to normalize the intensity of each diffusion path to ensure that the weights are interpretable. This fusion diffusion matrix will be used for subsequent graph convolution operations.
Based on the above graph structure, we design a multi-order diffusion graph convolution module to model the higher-order spatial interaction and multi-scale influence between nodes. Let the input time series plot feature be , then the -layer graph convolution operation is expressed as Equation 2:
where, is the graph input feature of layer , is the trainable weight of the -th order diffusion nucleus of the -th layer, and is the diffusion order, which controls the receptive range of the neighborhood. Activation function σ (·) ReLU is generally chosen to increase nonlinear representation capabilities.
This multi-order diffusion convolution mechanism can effectively extract the potential long-distance dependence between fire stations and high-frequency accident areas, and significantly enhance the sensitivity of the model to the spatial risk agglomeration effect.
In order to further enhance the adaptability of the dual-channel diffusion module, we introduce a learnable gating weight mechanism. By parameterizing the diffusion coefficient into a Softmax normalized gating vector, the model can adaptively adjust the influence ratio between directed traffic diffusion and undirected risk diffusion according to the actual traffic and risk states. This mechanism not only improves the dynamic adaptation ability of diffusion information, but also effectively avoids the problem of imbalance of information channels.
3.2. Scheduling Optimization Mechanism
In the fire dispatching task, it is not only necessary to model the spatial information, but also to accurately capture the time evolution law of historical fire events. To this end, we introduce Temporal Attention Gating to identify the most representative information in historical time periods. Through a learnable gating network, the mechanism dynamically assigns different weights to different time steps, so that the model focuses on the key moments of high-risk or intensive alarms.
Specifically, if the graph input at time t is and the historical state is , then the attention coefficient of step is defined as Equation 3:
Among them, and are used for the weight matrix of the feature transformation, is the bias term, and is the attention query vector, which is used to output the scalar attention weight attention mechanism is normalized in the form of softmax, so that the sum of the weights of all time steps is to ensure the stability of the time series.
Finally, the timing diagram representation is integrated by means of a weighted summation, as shown in Equation 4:
where is the convoluted graph representation of each time step, and is the final spatiotemporal fusion feature input to the scheduling module. In order to further improve the practicability of the model, we introduce a reinforcement learning mechanism to enable the scheduling strategy to be self-optimized based on system feedback. We model the fire dispatch task as a Markov decision process (MDP), with the status including the location of the vehicle, the risk level of the area, and the action as the vehicle dispatch decision. The function is defined as follows in Equation 5:
where is the current state, is the scheduling action, is the discount factor, and is the current reward, indicating the scheduling effect.
The specific instant reward function is designed as Equation 6:
where, represents the average response delay, is the vehicle load pressure, and is the coverage of the dispatch area. , and are the adjustment coefficients, which are used to balance the scheduling target. The parameter update uses a constrained deep learning (Constrained DQN) strategy to optimize the scheduling strategy by minimizing the following loss function, which is expressed as Equations 7 and 8:
where is the target value, is the penalty term for resource constraint violation, and is the penalty intensity. This mechanism ensures that the scheduling strategy not only pursues the best performance, but also satisfies the constraints of resource allocation and system security.
Specifically, as illustrated in Figure 1, The proposed AD-STGNN (Adaptive Diffusion Spatiotemporal Graph Neural Network) model consists of three parts: data input, spatiotemporal graph neural network modeling, and reinforcement learning optimization. First, the historical fire alarm and response information was derived from the NFIRS data, in which the urban area map structure was constructed, and the dual-channel diffusion module was constructed by traffic flow and risk co-correlation. Then the model utilizes multi-order diffusion convolutional layers to obtain the spatial feature, follows by the temporal attention gating mechanism for the purpose of acquiring the key time period information and eventually schedules the strategy relying on constrained deep Q learning module.
4. Experiments
4.1. Experimental Setup
The experimental data is from NFIRS-PDR (The National Fire Incident Reporting System, Public Data Release with Dispatch Records), which is released by the Federal Emergency Management Agency (FEMA) in the United States, The database of real fire dispatch records in multiple states from 2019 to 2023, including the event type, the time of occurrence, the time of dispatch, and the time of vehicle arrival and the station number, regional geographic location and other key information. The data possesses strong spatio-temporal characters, which contribute to building urban area maps at an hourly scale and the spatial propagation and temporal variation features of fire risks.
Furthermore, three representative methods were selected as the baseline for comparison, including ASTGCN, ST-MetaNet, and GraphSARL. ASTGCN uses the spatial and temporal attention mechanism to capture inter-node dependencies and key temporal dynamics, but its diffusion modeling is based on static graph structure and lacks directional modeling ability. ST-MetaNet uses the meta-learning framework to improve the generalization ability of the model in different regions, which is suitable for scenarios with few samples, but the dynamic modeling of local high-frequency fire areas is weak. GraphSARL embeds the graph structure into the actor-critic reinforcement learning architecture, which can realize state-based scheduling optimization, but its graph modeling ability is limited and lacks resource capacity constraint design.
4.2. Experimental Analysis
Average dispatch delay measures the average time taken by firefighting vehicles from dispatch to arrival at the scene, is a core indicator that directly reflects the efficiency of rescue . As can be seen in Figure 2, with the increase of the size of the historical window, the model can use richer time series information, so that the average response delay of each method decreases. However, the Ours curve is always below the other three baselines, indicating that AD-STGNN outperforms ASTGCN, ST-MetaNet, and GraphSARL in spatiotemporal dependence modeling at all scales. In particular, when the window exceeds 100 time steps, the delay reduction of this method is more significant, indicating that the dual-channel diffusion and sequential attention gating mechanism has a stronger ability to capture the long-term risk.
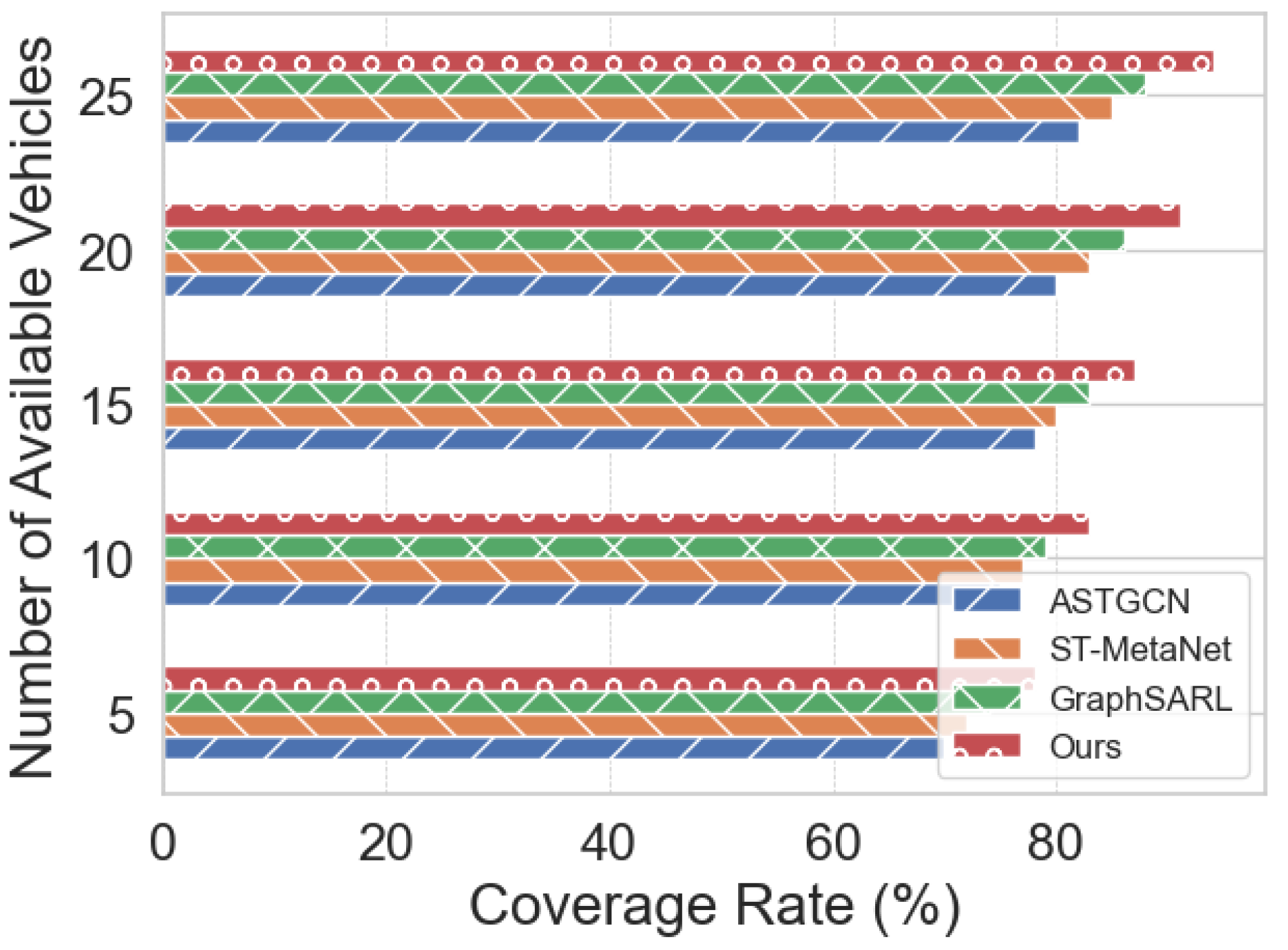
As can be seen from Figure 3, as the number of available firefighting vehicles increases from 5 to 25, the coverage of the four methods shows a significant improvement trend, but the method (Ours) is always significantly ahead.
Specifically, when the number of vehicles is only 5, the coverage of Ours is about 78%, which is about 4 percentage points higher than the optimal GraphSARL; When the number of vehicles increased to 25, Ours’ coverage climbed to 94%, extending to 6 percentage points from GraphSARL’s 88%. In contrast, although ASTGCN and ST-MetaNet can be improved by adding vehicles, they lag behind GraphSARL and Ours at all resource levels, and the gap between them is especially obvious under medium and low resource conditions.
In the scheduling optimization mechanism, we elaborate on the design principle of the reward function. Different from the traditional reinforcement learning method, which only minimizes the single goal of delay, this study comprehensively considers the three indicators of response delay, resource load and service coverage, and adopts normalized processing and adjustable weight coefficient, so that the model can achieve multi-objective collaborative optimization in complex urban environments. Experimental results show that the proposed design significantly improves the stability of the policy convergence speed and scheduling quality.
5. Conclusion
In conclusion, the AD-STGNN framework proposed in this paper integrates the historical data of NFIRS-PDR fire alarm and dispatch through the dual-channel diffusion convolution module and the temporal attention gating mechanism, so as to realize the efficient spatiotemporal feature extraction of urban fire vehicles in the dynamic graph structure. Combined with the deep Q learning module with constraints, the model can adaptively optimize the dispatch strategy end-to-end, thereby significantly reducing the average response delay, improving coverage, and outperforming ASTGCN, ST-MetaNet, and GraphSARL under different resource and window settings. Experimental results show that AD-STGNN not only has strong adaptability to long-term dependence and risk propagation, but also performs robustly in multi-dimensional performance indicators. In the future, we can consider introducing multi-source heterogeneous data such as real-time traffic ingestion and weather forecasting, optimizing online learning strategies, and extending the model to a wider range of smart public safety scenarios such as emergency medical rescue and disaster monitoring.
References
- Momeni, M.; Soleimani, H.; Shahparvari, S.; Afshar-Nadjafi, B. Coordinated routing system for fire detection by patrolling trucks with drones. Int. J. Disaster Risk Reduct. 2022, 73. [Google Scholar] [CrossRef]
- Tian, G.; Fathollahi-Fard, A.M.; Ren, Y.; Li, Z.; Jiang, X. Multi-objective scheduling of priority-based rescue vehicles to extinguish forest fires using a multi-objective discrete gravitational search algorithm. Inf. Sci. 2022, 608, 578–596. [Google Scholar] [CrossRef]
- Zhang, X. Design and Development of Comprehensive Collaborative Dispatching and Disposal System for Urban Frequent Emergency. Acad. J. Comput. Inf. Sci. 2024, 7. [Google Scholar] [CrossRef]
- Yu, Z.; Xu, L.; Chen, S.; Jin, C. Research on Urban Fire Station Layout Planning Based on a Combined Model Method. ISPRS Int. J. Geo-Information 2023, 12, 135. [Google Scholar] [CrossRef]
- Davidich, Y.; Földes, D.; Galkin, A. Enhancing emergency response efficiency through advanced urban logistics: The role of driver psychophysiology and vehicle dynamics in mitigating socio-economic impacts. Transp. Res. Interdiscip. Perspect. 2025, 31. [Google Scholar] [CrossRef]
- Zhu, S.; Liu, W.; Liu, D.; Li, Y. The impact of dynamic traffic conditions on the sustainability of urban fire service. Sustain. Cities Soc. 2023, 96. [Google Scholar] [CrossRef]
- Senapati, B.R.; Khilar, P.M.; Swain, R.R. Fire Controlling Under Uncertainty in Urban Region Using Smart Vehicular Ad hoc Network. Wirel. Pers. Commun. 2020, 116, 2049–2069. [Google Scholar] [CrossRef]
- Rangel, E.O.; Costa, D.G.; Peixoto, M.M. An optimization approach for emergency vehicles dispatching and traffic lights adjustments in response to emergencies in smart cities. Brazilian Symposium on Computing Systems Engineering 2021, 2021, 1–8. [Google Scholar]
- Liu, H.; Soleimaniamiri, S.; Li, X.; Xie, S. Joint location and assignment optimization of multi-type fire vehicles. Comput. Civ. Infrastruct. Eng. 2021, 37, 976–990. [Google Scholar] [CrossRef]
- Chen, M.; Wang, K.; Yuan, Y.; Yang, C. A POIs Based Method for Location Optimization of Urban Fire Station: A Case Study in Zhengzhou City. Fire 2023, 6, 58. [Google Scholar] [CrossRef]
- Kc, K.; Ardianto, R.; Wang, S. Examining fire service coverage and potential sites for fire station locations in Kathmandu, Nepal. Urban Informatics 2024, 3, 1–17. [Google Scholar] [CrossRef]
Figure 1.
Comparison of Path Allocation and Vehicle Matching Accuracy.
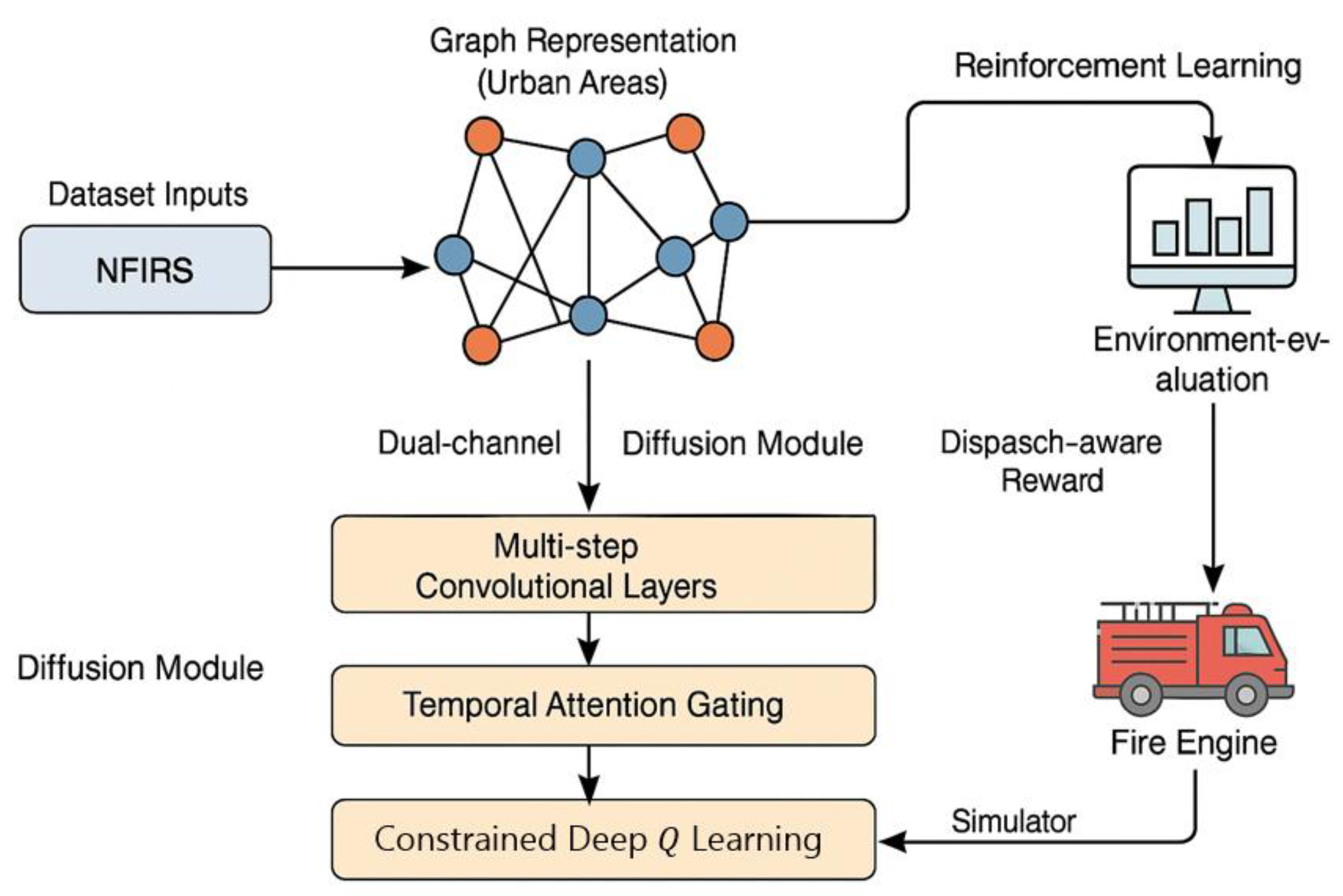
Figure 2.
Average Dispatch Delay With Historical Window Size.
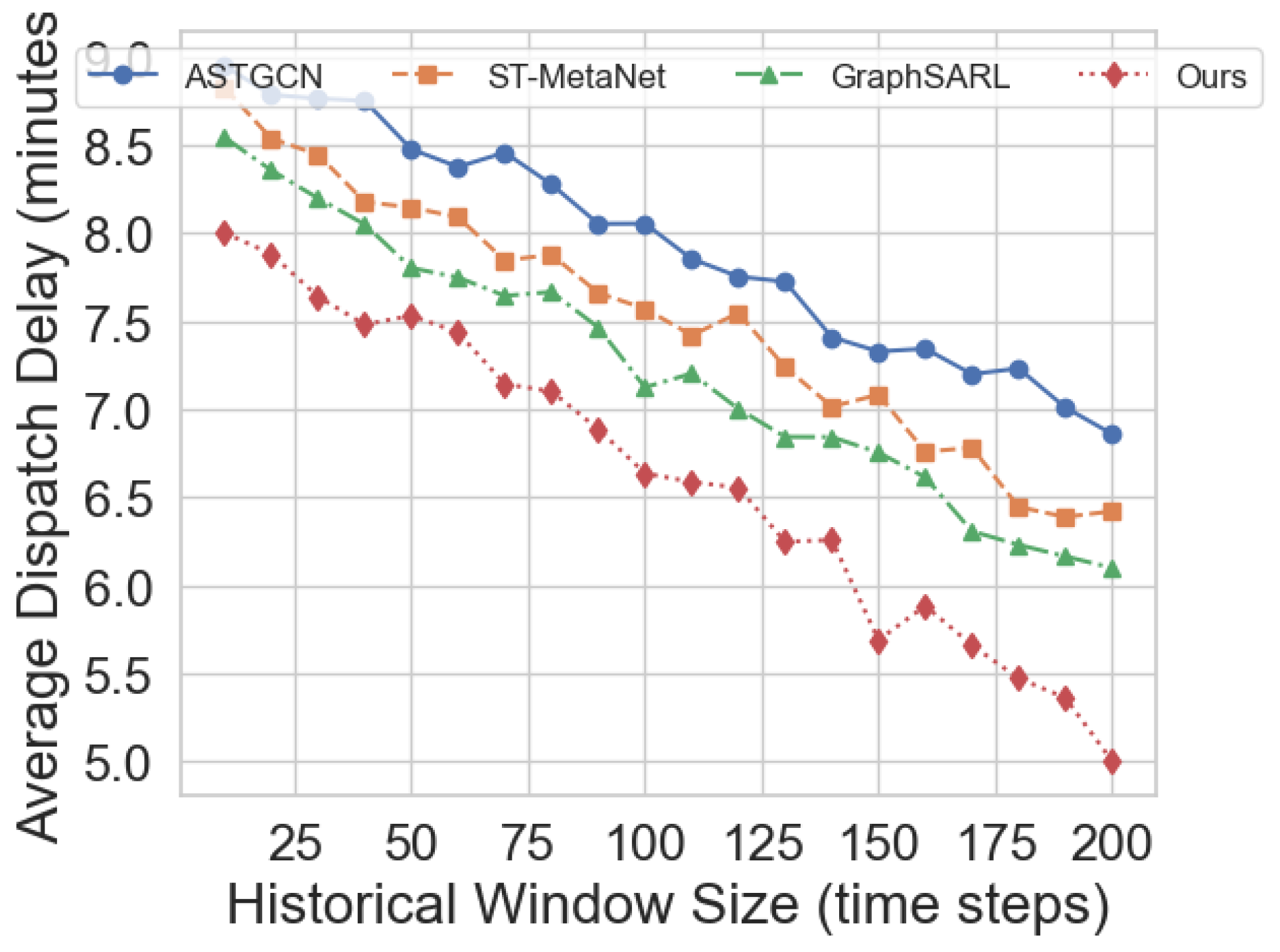
Figure 3.
Coverage Rate With Available Vehicles.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



