Submitted:
16 January 2024
Posted:
17 January 2024
You are already at the latest version
Abstract
Carbon fiber reinforced polymer (CFRP) bending structure is widely used in the aviation field. The occurrence and propagation of delamination damage will reduce the safety of in-service bending structures. As a detection tool with high damage sensitivity, Lamb wave can effectively identify delamination damage. In this study, the signal difference coefficient (SDC) was introduced to quantify delamination damage and evaluate the sensitivity of A0 and S0 mode lamb waves to delamination damage. The simulation results show that compared with the S0 mode Lamb wave, the A0 mode Lamb wave exhibits higher delamination damage sensitivity. The delamination damage can be quantified based on the strong correlation between the SDC and the delamination damage size. The control effect of the linear array PZT phase time-delay method on Lamb wave mode was investigated by simulation. The phase time-delay method realizes the generation of a single-mode Lamb wave, which can separately excite the A0 mode and S0 mode Lamb wave to identify delamination damage of different sizes. The A0 mode Lamb wave was excited by the developed one-dimensional linear comb transducer (LCT), which was used to conduct the detection experiment on the CFRP bending plate with delamination damage sizes of Φ6.0 mm, Φ10.0 mm, and Φ15.0 mm. The experimental results verify the correctness of the simulation. According to the Hermite interpolation results of the finite-element simulation data, the relationship between the delamination damage size and the SDC was fitted by the Gaussian function, which can accurately quantify the delamination damage. The absolute error of the delamination damage quantification with fitting expression is not larger than 0.8 mm, and the percentage error is not more than 8%.
Keywords:
Lamb wave mode control
; phase time-delay method
; CFRP bending plate
; linear comb transducer
; signal difference coefficient
; quantification of delamination damage
1. Introduction
CFRP is increasingly used in aerospace, shipbuilding, and automotive industries due to its advantages of high specific strength and stiffness, lightweight, and long fatigue life [1,2]. For example, in recent years, more than 50% of the structural weight of most aircraft is made of CFRP, which reduces the total weight and fuel consumption of the aircraft [3]. CFRP is an orthotropic material made of carbon-fiber cloth layer by layer. Compared with isotropic materials, CFRP is prone to complex and inconspicuous damage forms during use [4], such as delamination, matrix cracking, and fiber rupture [5]. In addition, to meet the needs of various engineering applications, CFRP is usually made into different types of structures, such as tube, beam [6], winglet [7], and bending structures [8]. The bending part is a common aircraft structure [9], such as rectangular and C-shaped wing beams. The vulnerability of CFRP bending structures has been demonstrated [10]. Due to the structural characteristics of bent CFRP, stress/strain concentration is easily induced in the bending area. As a result, the shape distortion and uneven distribution of carbon fibers occur in the bending area, ultimately leading to the appearance of damage. Delamination is the most common and extremely harmful failure mode of CFRP bending structures [11,12]. Delamination usually occurs covertly within the CFRP structure. The occurrence and development of delamination significantly reduce the stiffness, strength, and load-bearing capacity of the structure. The bending CFRP structure will suffer serious overall failure when the delamination size reaches a critical value [13]. Therefore, the detection of the bending feature area to achieve the quantification of the delamination is crucial for the safe and reliable operation of the bending CFRP structure during the service life.
As an active detection method, Lamb wave has the advantages of long propagation distance, small long-distance propagation attenuation, large coverage area, and high damage sensitivity [14]. Compared with other damage detection methods, Lamb wave has the characteristics of propagation along the plate and unique advantages for detecting bending plate damages. Lamb wave detection technology has proven to be one of the most promising methods in non-destructive assessment applications and can be used to detect various types of damage (delamination, holes, etc.) in CFRP structures [15,16]. Lamb wave has two modes of symmetry and anti-symmetry due to its dispersion characteristics. Lamb wave components with different mode frequencies have unique sensitivities to delamination damage due to their propagation characteristics. When Lamb waves encounter delamination damage in the CFRP plate structure, phenomena such as scattering, transmission, and mode conversion will occur [17,18]. The Lamb waves propagate in each sub-layer above and below the layer, and sub-layers with different lay-up methods have different propagation velocities [19]. The propagation velocity, phase, and peak amplitude of Lamb wave will change due to the existence of delamination damage [20], and delamination damage with different sizes has different effects on Lamb wave propagation characteristics. Based on these properties of Lamb waves, quantitative detection of delamination damage can be achieved. Xianping Zeng et al. [21] detected the damage of large composite laminates using lamb wave. The proposed damage contour algorithm using the convex envelope of damage reflection points and maximum inscribed n-polygon can accurately determine the quantitative damage size. Jiahui Guo et al. [22] extracted the precise time-of-flight (ToF) of the Lamb wave using the matching pursuit decomposition algorithm. The scattering source is identified on the elliptical trajectory obtained by the ToF of each sensing path. The Gaussian kernel probability density distribution of the scattering source can accurately characterize the damage size.
Generally speaking, the fundamental symmetric S0 and anti-symmetric A0 Lamb modes were used for practical detection [23]. Lamb waves in A0 mode and S0 mode have different propagation characteristics. At the same excitation frequency, the A0 mode Lamb wave has a lower propagation velocity and shorter wavelength than the S0 mode Lamb wave. Consequently, the A0 mode Lamb wave is more sensitive to damage [24,25,26]. However, it is difficult to analyze the signal of the A0 mode Lamb wave because it has higher dispersion and propagation attenuation than the S0 mode Lamb wave [27,28]. Ramadas et al. [29] investigated the interaction of A0 mode Lamb waves with the delamination in the middle plane of CFRP laminates. The research shows that the A0 mode Lamb wave is converted into an S0 mode Lamb wave at the leading edge of the delamination. The S0 mode Lamb wave only exists within the sub-layer of the delaminated region and converts back to the A0 mode Lamb wave when leaving the delaminated region.
In addition, extracting information carried by Lamb waves based on time domain features was challenging. As a result, various signal analysis methods were applied to Lamb waves to extract signal features. Guoqi Zhao et al. [30] employed PZT piezoelectric sensor to excite and receive A0 mode Lamb waves to detect the delamination damage of the composite double cantilever beam. The A0 mode Lamb wave signal was processed by Hilbert transform, Fourier transform and continuous wavelet transform, and the effective A0 mode Lamb wave parameters were extracted to characterize the delamination damage length. Pillarisetti et al. [31] obtained the power spectral density of the A0 and S0 mode Lamb wave signals by performing a fast Fourier transform and quantified the damage degree of CFRP based on the stress wave factor extracted from the power spectral density distribution.
To analyze the quantitative detection ability of A0 and S0 mode Lamb waves on CFRP delamination damage, this paper introduces SDC to evaluate the sensitivity of A0 and S0 mode Lamb waves to delamination damage and quantify the delamination damage. The linear array PZT phase time-delay method was employed to realize the control and enhancement of single-mode Lamb wave. The quantitative detection ability of single-mode Lamb waves to delamination damage is investigated by simulation. The A0 mode Lamb wave was excited by the developed one-dimensional LCT, which was employed to conduct the detection experiment on the CFRP bending plate with different delamination damage sizes. The relationship between the delamination damage size and SDC obtained by the finite-element simulation data can accurately quantify the delamination damage.
2. Signal Processing Methods
The characteristics of the Lamb wave signal are altered due to the presence of damage. In this article, SDC was employed to evaluate the damage sensitivity of the Lamb wave. At the same time, the damage size can be evaluated based on the SDC between the signal with damage information and the non-damage baseline signal. SDC is defined as
where m is the length of the signal sequence. Sdi and Sri are the damage signal and the baseline signal correspondingly, μSd and μSr are the mean values of the corresponding signals, respectively. If there is no damage, the two signals are the same, and the SDC is 0. If the phases of the two signals are opposite, the SDC is close to 1.0.
To obtain the ToF of the Lamb wave, the continuous wavelet transform coefficients (CWTC) of the Lamb wave signal are obtained through the application of wavelet transform. The wavelet transform is defined as:
where t is time. S(t) is the signal sequence. is the wavelet basis function, where a is the scale factor, and its value is inversely proportional to the frequency. The small-scale factor can distinguish the high-frequency components of the signal sequence, and the large-scale factor can distinguish the low-frequency components of the signal sequence. And b is the displacement factor, which represents the time range in which a signal sequence of a certain frequency appears.
3. Finite-Element Simulation
The finite-element simulation technology can accurately calculate the propagation characteristics of Lamb waves in CFRP [32,33]. The three-dimensional finite-element analysis of Lamb wave propagation in CFRP was conducted in the Abaqus software environment.
3.1. Finite-Element Simulation Model
In this paper, the detection effect of A0 mode and S0 mode Lamb waves on delamination damage in CFRP bending plates was investigated by finite-element analysis. The numerical simulation of [0°/45°/90°/−45°]s quasi-isotropic CFRP was carried out. The relationship between the ply direction and the coordinate axis is shown in Figure 1, and the CFRP material properties are listed in Table 1.
As shown in Figure 2a, the delamination damage is located at the center of the CFRP bending plate. The structural dimensions of the CFRP bending plate and the position of LCT on the CFRP bending plate are shown in Figure 2b. The bending radius R of the CFRP bending plate is 5.0 mm and the thickness is 2.0 mm. As shown in Figure 2b, the LCT used to excite the Lamb wave was pasted on the upper and lower sides of the CFRP plate. The excitation elements of the LCT pasted to the upper side of the CFRP plate were numbered from Pup1 to Pup8. The excitation elements of the LCT pasted to the lower side of the CFRP plate were numbered from Plp1 to Plp8. The LCT used to receive Lamb waves was pasted on the upper side of the CFRP plate, and the receiving elements of the LCT were numbered from Puc1 to Puc8.
PZT-5H was used as the excitation element and the receiving element, and its density is 7500.0 kg/m3. The stiffness coefficient, piezoelectric coefficient, and relative dielectric constant of PZT-5H are listed in Table 2, Table 3 and Table 4, respectively, and the absolute dielectric constant is 8.854 × 10-12 F/m.
3.2. Selection of Excitation Signal Frequency
Lamb waves exhibit varying levels of sensitivity to damage at different frequencies. Before conducting damage detection, it is necessary to understand the dispersion characteristics of Lamb waves and select a more reasonable excitation frequency. However, there is no analytical solution to the dispersion equation for multilayer quasi-isotropic materials. The Dispersion Calculator [34] was used to calculate the phase velocity and group velocity dispersion curves of CFRP, as shown in Figure 3. The through-thickness displacement profiles of Lamb waves propagating in CFRP at frequencies of 80 kHz, 160 kHz, and 320 kHz are shown in Figure 4. It can be seen from the figure that the through-thickness displacement profile of CFRP is approximately the same below the frequency of 240 kHz. Consequently, a three-period narrowband Tone-Burst with a central frequency of 160 kHz modulated by the Hanning window was selected as the excitation signal [35]. The excitation signal is defined as:
where the excitation frequency is f = 160 kHz. The waveform of the excitation signal is shown in Figure 5.
3.3. Selection of Mesh Element Size
The accuracies of finite-element simulation results and computer time consumption are closely related to the mesh size. Theoretically, the smaller the mesh element size, the more accurate the calculation results will be, but the longer the computer time consumption [36,37]. To balance the contradiction between calculation accuracy and computer time-consuming, it is meaningful to select the most suitable mesh element size for finite-element simulation.
The CFRP plate calculation model is shown in Figure 6. Since the independence verification of the mesh element size only focuses on the dependence of the Lamb wave on the mesh element size during the propagation process, the Lamb wave excitation and reception method based on displacement loading was applied in the flat plate finite-element simulation. The excitation signal defined by Formula (3) was loaded at point P1, and the Lamb wave signals were received at point P2.
In this paper, the mesh element type of CFRP was set to C3D8R. Four levels of mesh element size of 0.12 mm, 0.16 mm, 0.2 mm, and 0.4 mm were considered to verify the mesh element size independence of the finite-element simulation results. The ABAQUS/Explicit dynamic analysis solver was used to calculate the computational model with a total duration of 150 μs. The fixed time step for finite-element calculation was 10 ns.
The received time-domain signals and their CWTC are shown in Figure 7. It can be seen from the figure that the time-domain waveform and CWTC of the mesh element size of 0.4 mm are very different from those of other mesh element sizes. The characteristics of the time-domain waveforms with mesh element sizes of 0.12 mm, 0.16 mm, and 0.2 mm are very similar. The characteristics of Lamb waves under different mesh element sizes is shown in Figure 8. It can be seen from the figure that the difference between the ToF obtained under each mesh element size is very small. Selecting the appropriate mesh element size was challenging based on the variation in ToF. The difference in the mean value of the signal obtained under the mesh element sizes of 0.4 mm and 0.2 mm is 68.2%. And the difference in the mean value of the signal obtained under the mesh element sizes of 0.2 mm and 0.16 mm is 0.4%. Consequently, the mesh element with a size of 0.16 mm was selected in this paper to complete the subsequent research.
3.4. Modal Verification of Lamb Wave
Lamb wave mode control can be achieved using LCT. As shown in Figure 9, LCT consists of a group of PZT array elements arranged in parallel at certain intervals. Lamb wave mode control was achieved by adding phase time-delay to the excitation signal of each PZT array element of the LCT. Assume that the LCT contains N PZT array elements. The distance between PZT array elements is s, and the width of PZT array elements is w. If the Lamb wave propagates along the negative direction of the X-axis, the phase time-delay of the PZT array element numbered N is:
where t0 = s/cp, represents the phase time-delay added between adjacent PZT array elements. And cp is the phase velocity of the Lamb wave, which can be obtained by calculating the phase velocity dispersion curve.
tN = (N − 1)t0,
Each probe of the LCT developed in this article has 8 PZT array elements. The distance between PZT array elements s = 0.8 mm, and the width of PZT array elements w = 0.4 mm. According to the phase velocity dispersion curve, the phase velocities of the A0 mode and S0 mode at 160 kHz can be obtained as 4623.4 m/s and 1186.3 m/s correspondingly. The phase time-delay t0 added between adjacent PZT array elements of the LCT is 674.4 ns in the A0 mode and 173.0 ns in the S0 mode.
To verify the effectiveness of the Lamb wave mode control method in this article, the Abaqus implicit-explicit co-simulation technology was used to calculate the flat plate model, as shown in Figure 10. The paste position of the PZT array element of LCT on the CFRP plate is shown in Figure 11. The total duration of finite-element calculation was 70 μs. The fixed time step of the finite-element calculation was 10 ns. The mesh element type of PZT-5H was set to C3D8E in this article.
The surfaces of the excitation element and the receiving element in contact with the CFRP were set as zero potential surfaces. The surfaces of the excitation elements parallel to the zero potential surfaces were set as the excitation surfaces for loading voltage. The surfaces of the receiving elements parallel to the zero potential surfaces were set as the receiving surfaces of the voltage. The phase time-delay of each excitation element and the receiving element is shown in Figure 12. The phase time-delay of the loading voltage of the excitation element with the same X-axis coordinates and pasted on the upper and lower sides of the CFRP is the same. When the A0 mode Lamb wave was generated by controlling the phase time-delay of the LCT, the excitation signals loaded on each excitation element pasted on the upper and lower sides of the CFRP are shown in Figure 13a. The voltage of the excitation surfaces of the excitation elements numbered Pup1 to Pup8 and numbered Plp1 to Plp8 was set to 500.0 V. When the S0 mode Lamb wave was generated by controlling the phase time-delay of the LCT, the excitation signals loaded on each excitation elements pasted on the upper and lower sides of the CFRP are shown in Figure 13b. The voltage of the excitation surfaces of the excitation elements numbered Pup1 to Pup8 was set to 500 V, and the voltage of the excitation surfaces of the excitation elements numbered Plp1 to Plp8 was set to -500.0 V.
The signal propagation of the A0 mode Lamb wave generated by LCT excitation at 27 μs is shown in Figure 14a. The signal propagation of the S0 mode Lamb wave generated by LCT excitation at 16.5 μs is shown in Figure 14b. It can be seen from the figure that the Lamb wave signals can be aggregated in the desired direction by controlling the LCT phase time-delay. The change of phase time-delay will produce different Lamb wave signal propagation phenomena. The wavelength of the S0 mode Lamb wave generated by LCT excitation is longer than that of the A0 mode Lamb wave.
The A0 mode and S0 mode Lamb waves were generated by LCT excitation, and the surface average voltage signals received by each receiving element are shown in Figure 15. The time-delay superimposed processing of the surface average voltage signal received by the receiving element was carried out, and the time-delay superimposed voltage signal of A0 mode and S0 mode Lamb wave was obtained, as shown in Figure 16. It can be seen from Figure 15 and Figure 16 that different Lamb wave signals can be excited by changing the phase time-delay of the excitation element. The time-domain distribution and amplitude of the Lamb wave signal were changed due to the different phase time-delay. The continuous wavelet transform was applied to the time-delay superimposed voltage signals, and the CWTCs of the time-delay superimposed voltage signals were obtained as shown in Figure 17. The ToF of Lamb wave propagation was obtained using the calculation method of Section 3.3, and the group velocity of the Lamb wave was calculated according to the propagation distance of the Lamb wave. As shown in Figure 18, the group velocities of A0 mode and S0 mode Lamb waves obtained by finite-element simulation were 1235.7 m/s and 4369.2 m/s at the frequency of 160 kHz, respectively. The group velocities of A0 mode and S0 mode Lamb waves calculated theoretically were 1302.1 m/s and 4359.4 m/s, respectively. As shown in Table 5, the absolute errors between the simulation results and theoretical calculation results of the group velocities of A0 mode and S0 mode Lamb waves were 66.4 m/s and 9.8 m/s, respectively, with percentage errors of 5.1% and 0.2%. The error between the simulation results and the theoretical calculation results was within the acceptable range. The LCT can be employed to accurately excite A0 mode and S0 mode Lamb waves proved by finite-element simulation.
3.5. Delamination Damage Detection of CFRP Bending Plate
The finite-element calculation was carried out for the model shown in Figure 2. As shown in Figure 19, the detaching mesh node method was employed to generate delamination damage in the middle layer of the CFRP bending plate. A node was detached into two unrelated nodes at the same position to generate zero-volume delamination damage. The sizes of delamination damage were Φ5.0 mm, Φ8.0 mm, Φ11.0 mm, Φ14.0 mm, Φ17.0 mm and Φ20.0 mm, respectively. The CFRP bending plate without delamination damage was used as a reference. The time-domain signal of the CFRP bending plate without delamination damage was obtained by finite-element calculation as the reference signal.
The time-delay superimposed voltage signals of different sizes of delamination damage obtained by finite-element calculation are shown in Figure 20. It can be seen from the figure that when A0 mode Lamb waves were used to detect delamination damage, the change in the size of layered damage had a significant impact on the time-delay superimposed voltage signal. The phase and amplitude of the time-delay superimposed voltage signal had changed due to the different sizes of the delamination damage. When the S0 mode Lamb waves were employed to detect the delamination damage, the influence of the delamination damage size on the time-delay superimposed voltage signal was non-significant.
The SDC values of time-delay superimposed voltage signals with different sizes of delamination damage are shown in Figure 21. It can be seen from the figure that both in the A0 mode and in the S0 mode, the SDC value increases with the increase of the delamination damage size. Delamination damage can be quantified by analyzing the variation rule of SDC values with the size of the delamination damage. In addition, as shown in Figure 21, when the A0 mode Lamb wave was employed for delamination damage detection, the SDC value remained relatively constant in case the size of the damage was less than 5.0 mm or greater than 17.0 mm. This meant that the SDC value did not significantly change with an increase in the size of the delamination damage within this range. In cases where the delamination damage size is less than 5.0 mm, the A0 mode Lamb wave is insensitive to the delamination damage because its wavelength is larger than the size of the damage. In cases where the delamination damage size is greater than 17.0 mm, the A0 mode Lamb wave cannot completely cover the large-scale delamination damage due to the small size of the PZT array element and its short distance from the delamination damage. When the size of delamination damage is between 5.0 and 17.0 mm, the SDC value increases significantly with the increase of delamination damage size, increasing from 0.013 to 0.51. The relationship between SDC value and delamination damage size is different in S0 mode and A0 mode.
In the case of delamination damage detection using S0 mode Lamb wave, when the delamination damage size is less than 20.0 mm, the SDC value gradually increases from 0.0 to 0.05 with the increase of the delamination damage size. This is because the S0 mode Lamb wave is poorly sensitive to delamination damage size due to its longer wavelength and faster wave velocity. According to the variation of SDC value with the size of delamination damage, it can be concluded that the A0 mode Lamb wave is more sensitive to delamination damage identification.
At the same time, considering that the amplitude of the time-delay superimposed voltage signal of the S0 mode was nearly 100 times lower than that of the A0 mode, the signal-to-noise ratio of the S0 mode Lamb wave signal excited in the experiment may be small. As a result, obtaining available S0 Lamb wave data during the experiment was challenging. Therefore, the A0 mode Lamb wave was excited for the quantitative experiment of delamination damage.
Figure 21.
The SDC value of the time-delay superimposed voltage signal: (a) SDC value of A0 mode Lamb wave; (b) SDC value of S0 mode Lamb wave.
Figure 21.
The SDC value of the time-delay superimposed voltage signal: (a) SDC value of A0 mode Lamb wave; (b) SDC value of S0 mode Lamb wave.

4. Experiment
A miniaturized LCT was developed to excite and receive Lamb waves of expected modes in experiments. The structure diagram of the LCT is shown in Figure 22. The width of the PZT array element and the distance between adjacent array elements were the same as the size set in the simulation. Hypertronics served as a connector for LCT, with pins numbered from h1 to h16. The two probes of the developed LCT share a Hypertronics connector. The two probes of LCT were numbered H1 and H2, respectively, and each probe contains 8 PZT elements. The PZT array elements of probe H1 were numbered 1 to 8, and probe H2 were numbered 9 to 16. Probe H1 was used to excite Lamb waves, while probe H2 was used to receive them. The PZT array elements numbered 1 to 8 were connected to the pins numbered h1 to h8, respectively. Similarly, the PZT array elements numbered 9 to 16 were connected to the pins numbered h9 to h16, respectively. Each array element can individually excite and receive Lamb signals without mutual influence. The miniaturized LCT produced is shown in Figure 23. The length × width of the probe is 16.0 mm × 12.0 mm.
The prepared CFRP bending specimen is shown in Figure 24. The bending angle of the specimen is 90 °, the bending radius is 5.0 mm, and the length × width of the plate area of the CFRP bending plate is 300.0 mm × 300.0 mm, with a thickness of 2.0 mm. Delamination damage with dimensions of Φ6.0 mm, Φ10.0 mm, and Φ15.0 mm were prefabricated in CFRP bending plate specimens, respectively. Delamination damage was established by filling anti-sticking paper in the middle layer of CFRP bending plate specimens.
The Lamb wave phased array detection system was employed for verification experiments on the CFRP bending plate specimens with prefabricated delamination damage. The Lamb wave phased array detection system is shown in Figure 25. The Lamb wave phased array detection system consists of an ultrasonic phased array detector (UPAD) with 32 channels, a PC, LCT (including a clamping device), and a CFRP bending plate specimen. PC interacts with UPAD through the USB interface, which can control the time delay of each array element and transmit Lamb wave signal data. The verification experiment was carried out using the pitch-catch method. The 1st to 8th channels of UPAD were controlled by PC to generate the excitation signal with a set time delay, which was employed to excite the 1st to 8th array elements of probe H1. The Lamb waves excited by probe H1 propagated in the CFRP bending plate and were then perceived by probe H2. The Lamb wave signals were received by channels 9 to 16 of UPAD with a set time delay. The A0 mode Lamb wave signal after phase-controlled mode focusing was obtained.
The experimental system is shown in Figure 26. The A0 mode Lamb wave was excited to detect delamination damage in the CFRP bending plate. The sampling rate of UPAD was 30.0 MHz, and the sampling duration of the Lamb wave signal was 150 μs. During the experiment, the data were collected ten times for averaging to eliminate noise interference. The experiment of array elements without time delay was carried out to verify the effectiveness of the LCT controlling Lamb wave mode, and the time delay of all excitation and receiving array elements of the LCT was set to 0.0.
The signals generated by LCT with and without time delay are shown in Figure 27. It can be seen from the figure that the signals generated by the LCT with time delay were superimposed into the A0 mode Lamb wave in the time range of 70 to 120 μs. The signals generated by the LCT without time delay were not superimposed into a fixed mode Lamb wave throughout the time domain. It has been proven that LCT can effectively control the mode of Lamb waves by adding time delay.
The A0 mode Lamb wave signals of different delamination damage sizes were obtained in the experiment, as shown in Figure 28. It can be seen from the figure that the characteristics of the Lamb wave signal are insignificantly affected by the delamination damage size. The phase and amplitude of the Lamb wave signal are essentially constant under different delamination damage sizes. Therefore, the SDC was used to evaluate the difference of signals. The Lamb wave signals from 60 μs to 140 μs were processed to obtain the SDC values of different delamination damage sizes, as shown in Figure 29. It can be seen from the figure that the SDC value increases with the increase of the delamination damage size. The results of comparison experiments and simulations show that the finite-element method can accurately simulate the propagation of Lamb waves in CFRP bending plates. Delamination damage can be quantified according to the variation rule of SDC values with the size of the delamination damage.
5. Quantification of Delamination Damage
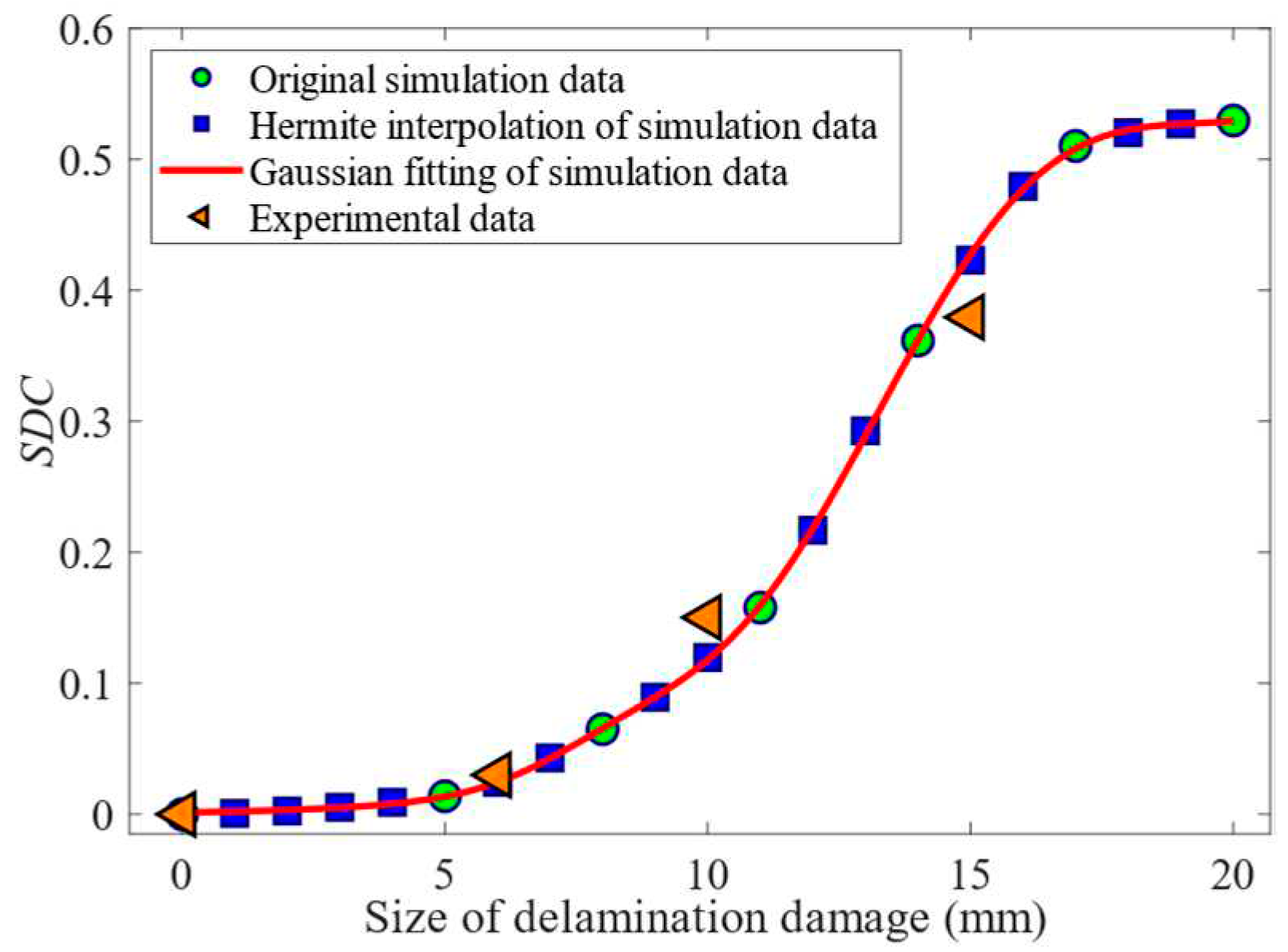
Only seven kinds of SDC values of delamination damage sizes were provided by finite-element simulation. To better understand the law of SDC values with the delamination damage sizes, more sample data were required for analysis. Piecewise cubic Hermite interpolation was applied to simulation data to obtain more SDC values of delamination damage. The Hermite interpolation results of the simulation data are shown in Figure 30. Based on the Hermite interpolation results of simulation data, a Gaussian function was employed to fit the relationship between the delamination damage sizes and SDC value. The fitting expression is shown in equation (5), where x represents the delamination damage size, and y represents the SDC value of the delamination damage signal. The fitting accuracy parameter R2 is 0.99992, and the fitting curve is shown in Figure 30.
To verify the accuracy of the fitting expression for the quantification of delamination damage, the difference between the calculation results of the fitting expression and the experimental data was analyzed. The absolute and percentage errors of the delamination damage quantification using the fitting expression are shown in Table 6. It can be seen from the table that the absolute error of the delamination damage quantification with fitting expression is not larger than 0.8 mm, and the percentage error is not more than 8%. This study indicates that the A0 mode Lamb wave can accurately quantify delamination damage.
Figure 30.
The relationship between delamination damage size and SDC values.
6. Conclusions
In this research, the Lamb wave detection of delamination damage in CFRP bending plate using finite-element and experimental methods. The main work and conclusions are as follows:
- (1)
- The effect of the linear array PZT phase time delay method on Lamb wave mode control was investigated by finite-element simulation. The phase time delay method realizes the control and enhancement of single-mode Lamb wave, which can excite A0 mode and S0 mode Lamb wave, respectively. The effectiveness of the phase time delay method for Lamb wave mode control was proved.
- (2)
- The finite-element models of delamination damage with different sizes were established, and the delamination damage was detected using A0 mode and S0 mode Lamb wave, respectively. The detection results indicate that compared with the S0 mode Lamb wave, the A0 mode Lamb wave exhibits high sensitivity to delamination damage. The strong correlation between SDC and the size of delamination damage can be utilized to quantify delamination damage.
- (3)
- Based on the conclusion of finite element simulation, a one-dimensional LCT was developed to excite the A0 mode Lamb wave for detecting delamination damage in the CFRP bending plate. The experimental results verify the correctness of the simulation results.
- (4)
- Based on the Hermite interpolation results of simulation data, a Gaussian function was used to fit the relationship expression between delamination damage size and SDC, which can accurately quantify delamination damage. The absolute error of the delamination damage quantification with fitting expression is not larger than 0.8 mm, and the percentage error is not more than 8%.
- (5)
- The experimental and modeling methods, signal analysis techniques, and fitting expressions presented in this article can be used as a reference for detecting delamination damage in CFRP.
Author Contributions
Conceptualization, Q.Y. and S.Z.; methodology, Q.Y.; validation, Q.Y. and Y.C.; formal analysis, Q.Y. and S.Z.; investigation, Q.Y. and Y.C.; resources, S.Z.; data curation, Q.Y., Y.C. and Y.D.; writing—original draft preparation, Q.Y.; writing—review and editing, Q.Y., S.Z. and J.H.; visualization, Q.Y.; supervision, S.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- S, P.; Km, S.; K, N.; S, S. Fiber Reinforced Composites—A Review. J Material Sci Eng. 2017, 06. [Google Scholar] [CrossRef]
- Das, T.K.; Ghosh, P.; Das, N.Ch. Preparation, Development, Outcomes, and Application Versatility of Carbon Fiber-Based Polymer Composites: A Review. Adv Compos Hybrid Mater 2019, 2, 214–233. [Google Scholar] [CrossRef]
- Azuara, G.; Barrera, E. Influence and Compensation of Temperature Effects for Damage Detection and Localization in Aerospace Composites. Sensors 2020, 20, 4153. [Google Scholar] [CrossRef] [PubMed]
- Ameri, B.; Moradi, M.; Mohammadi, B.; Salimi-Majd, D. Investigation of Nonlinear Post-Buckling Delamination in Curved Laminated Composite Panels via Cohesive Zone Model. Thin-Walled Structures 2020, 154, 106797. [Google Scholar] [CrossRef]
- Li, J.G.; Liu, P.F.; Chu, J.K. Finite Element Analysis of Delamination Behaviors of Composite Laminates under Hygrothermal Environment Using Virtual Crack Closure Technique. J Fail. Anal. and Preven. 2019, 19, 147–153. [Google Scholar] [CrossRef]
- Cantero-Chinchilla, S.; Malik, M.K.; Chronopoulos, D.; Chiachío, J. Bayesian Damage Localization and Identification Based on a Transient Wave Propagation Model for Composite Beam Structures. Composite Structures 2021, 267, 113849. [Google Scholar] [CrossRef]
- De Luca, A.; Perfetto, D.; De Fenza, A.; Petrone, G.; Caputo, F. Guided Waves in a Composite Winglet Structure: Numerical and Experimental Investigations. Composite Structures 2019, 210, 96–108. [Google Scholar] [CrossRef]
- Munian, R.K.; Roy Mahapatra, D.; Gopalakrishnan, S. Ultrasonic Guided Wave Scattering Due to Delamination in Curved Composite Structures. Composite Structures 2020, 239, 111987. [Google Scholar] [CrossRef]
- Hunten, K.A.; Barnard Feeney, A.; Srinivasan, V. Recent Advances in Sharing Standardized STEP Composite Structure Design and Manufacturing Information. Computer-Aided Design 2013, 45, 1215–1221. [Google Scholar] [CrossRef]
- Woo, K.; Nega, B.F.; Cairns, D.S.; Lua, J. Delamination Behavior of L-Shaped Composite Beam with Manufacturing Defects. J Mech Sci Technol 2020, 34, 3709–3720. [Google Scholar] [CrossRef]
- Kharghani, N.; Guedes Soares, C. Behavior of Composite Laminates with Embedded Delaminations. Composite Structures 2016, 150, 226–239. [Google Scholar] [CrossRef]
- Yamanaka, T.; Heidari-Rarani, M.; Lessard, L.; Feret, V.; Hubert, P. A New Finite Element Method for Modeling Delamination Propagation without Additional Degrees of Freedom. Composite Structures 2016, 147, 82–98. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, L.; Zhang, J.; Hu, N.; Zhang, C. Development of a Standardized Test Procedure and an Improved Data Reduction Method for the Mixed-Mode I/II Delamination in Composite Laminates. Composites Science and Technology 2021, 201, 108488. [Google Scholar] [CrossRef]
- Wang, X.; Tse, P.W.; Mechefske, C.K.; Hua, M. Experimental Investigation of Reflection in Guided Wave-Based Inspection for the Characterization of Pipeline Defects. NDT & E International 2010, 43, 365–374. [Google Scholar] [CrossRef]
- Jalalinia, M.; Amiri, G.G.; Razzaghi, S.A.S. Baseline-Free Damage Identification in Plate Containing a Circular Hole with Edge Cracks Based on Lamb Wave Scattering. J. Vib. Eng. Technol. 2023, 11, 1029–1046. [Google Scholar] [CrossRef]
- Miao, H.; Li, F. Shear Horizontal Wave Transducers for Structural Health Monitoring and Nondestructive Testing: A Review. Ultrasonics 2021, 114, 106355. [Google Scholar] [CrossRef] [PubMed]
- Michalcová, L.; Hron, R. Quantitative Evaluation of Delamination in Composites Using Lamb Waves. IOP Conf. Ser.: Mater. Sci. Eng. 2018, 326, 012006. [Google Scholar] [CrossRef]
- Feng, B.; Ribeiro, A.L.; Ramos, H.G. Interaction of Lamb Waves with the Edges of a Delamination in CFRP Composites and a Reference-Free Localization Method for Delamination. Measurement 2018, 122, 424–431. [Google Scholar] [CrossRef]
- Shoja, S.; Berbyuk, V.; Boström, A. Delamination Detection in Composite Laminates Using Low Frequency Guided Waves: Numerical Simulations. Composite Structures 2018, 203, 826–834. [Google Scholar] [CrossRef]
- Huo, H.; He, J.; Guan, X. A Bayesian Fusion Method for Composite Damage Identification Using Lamb Wave. Structural Health Monitoring 2021, 20, 2337–2359. [Google Scholar] [CrossRef]
- Zeng, X.; Liu, X.; Yan, J.; Yu, Y.; Zhao, B.; Qing, X. Lamb Wave-Based Damage Localization and Quantification Algorithms for CFRP Composite Structures. Composite Structures 2022, 295, 115849. [Google Scholar] [CrossRef]
- Guo, J.; Zeng, X.; Liu, Q.; Qing, X. Lamb Wave-Based Damage Localization and Quantification in Composites Using Probabilistic Imaging Algorithm and Statistical Method. Sensors 2022, 22, 4810. [Google Scholar] [CrossRef] [PubMed]
- Nzouatchoua, C.B.; Bentahar, M.; Montresor, S.; Colin, N.; Le Cam, V.; Trottier, C.; Terrien, N. Damage Localization on Composite Structures Based on the Delay-and-Sum Algorithm Using Simulation and Experimental Methods. Sensors 2023, 23, 4368. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Yang, L.; Zhang, J.; Ma, S.; Tian, T.; Deng, D.; Wu, Z. Damage Shape Recognition Algorithm of Composite Woven Fabric Plate Based on Guided Waves. Composite Structures 2023, 303, 116351. [Google Scholar] [CrossRef]
- Rabbi, M.S.; Teramoto, K.; Ishibashi, H.; Roshid, M.M. Imaging of Sub-Surface Defect in CFRP Laminate Using A0-Mode Lamb Wave: Analytical, Numerical and Experimental Studies. Ultrasonics 2023, 127, 106849. [Google Scholar] [CrossRef]
- Ng, C.-T.; Veidt, M. Scattering of the Fundamental Anti-Symmetric Lamb Wave at Delaminations in Composite Laminates. The Journal of the Acoustical Society of America 2011, 129, 1288–1296. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Zhai, M.; Zeng, L.; Huang, L.; Lin, J. Damage Assessment in Composite Laminates with the Lamb Wave Factorization Method. Composite Structures 2023, 307, 116642. [Google Scholar] [CrossRef]
- Hervin, F.; Maio, L.; Fromme, P. Guided Wave Scattering at a Delamination in a Quasi-Isotropic Composite Laminate: Experiment and Simulation. Composite Structures 2021, 275, 114406. [Google Scholar] [CrossRef]
- Ramadas, C.; Balasubramaniam, K.; Joshi, M.; Krishnamurthy, C.V. Interaction of the Primary Anti-Symmetric Lamb Mode (A0) with Symmetric Delaminations: Numerical and Experimental Studies. Smart Mater. Struct. 2009, 18, 085011. [Google Scholar] [CrossRef]
- Zhao, G.; Wang, B.; Wang, T.; Hao, W.; Luo, Y. Detection and Monitoring of Delamination in Composite Laminates Using Ultrasonic Guided Wave. Composite Structures 2019, 225, 111161. [Google Scholar] [CrossRef]
- Pillarisetti, L.S.S.; Talreja, R. On Quantifying Damage Severity in Composite Materials by an Ultrasonic Method. Composite Structures 2019, 216, 213–221. [Google Scholar] [CrossRef]
- Gong, C.; Wu, Q.; Zhang, H.; Li, P.; Xiong, K. Numerical Simulation of Lamb Wave Sensing of Low-Velocity Impact Damage in Composite Laminate. Composite Structures 2022, 279, 114844. [Google Scholar] [CrossRef]
- Ng, C.-T.; Veidt, M. Scattering Characteristics of Lamb Waves from Debondings at Structural Features in Composite Laminates. The Journal of the Acoustical Society of America 2012, 132, 115–123. [Google Scholar] [CrossRef] [PubMed]
- Huber, A. The Dispersion Calculator: An Open Source Software for Calculating Dispersion Curves and Mode Shapes of Guided Waves.
- Chen, B.; Zhang, Y.; Wang, Q.; Zhang, H.; Wang, Y. The Signal Analysis of Lamb Wave in Steel Plates Strengthened by CFRP with Interface Debonding. Ocean Engineering 2023, 283, 115061. [Google Scholar] [CrossRef]
- Zhao, H.; Yu, C.; Liu, Z.; Liu, C.; Zhan, Y. A Novel Finite Element Method for Simulating Residual Stress of TC4 Alloy Produced by Laser Additive Manufacturing. Optics & Laser Technology 2023, 157, 108765. [Google Scholar] [CrossRef]
- Yuan, H.; Yang, W.; Zhang, L.; Hong, T. Model Development of Stress Intensity Factor on 7057T6 Aluminum Alloy Using Extended Finite Element Method. Coatings 2023, 13, 581. [Google Scholar] [CrossRef]
Figure 1.
Ply direction of CFRP.
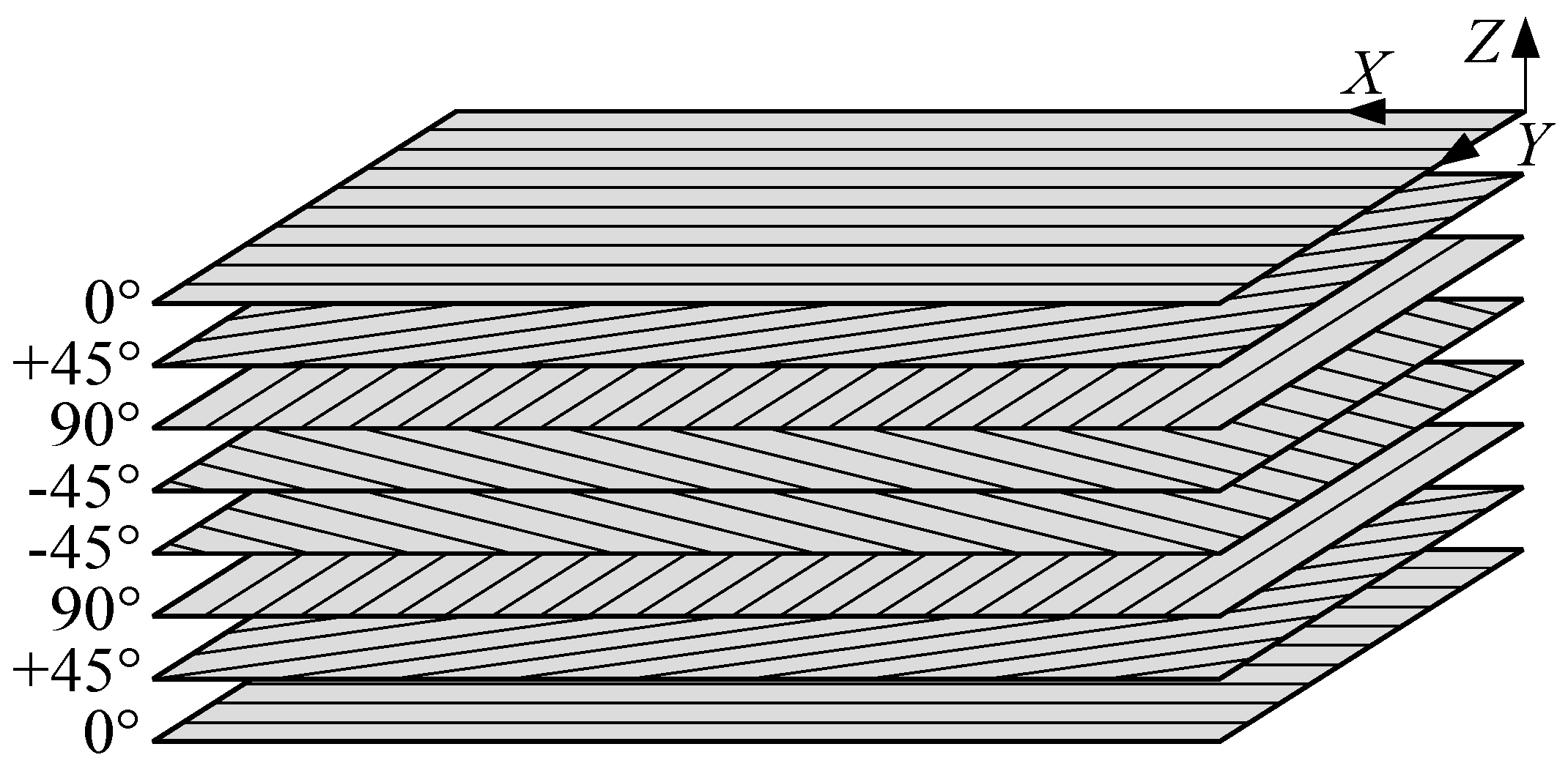
Figure 2.
The structure of the CFRP bending plate and the location of delamination damage: (a) Location of delamination damage; (b) Structure size and location of LCT.
Figure 2.
The structure of the CFRP bending plate and the location of delamination damage: (a) Location of delamination damage; (b) Structure size and location of LCT.
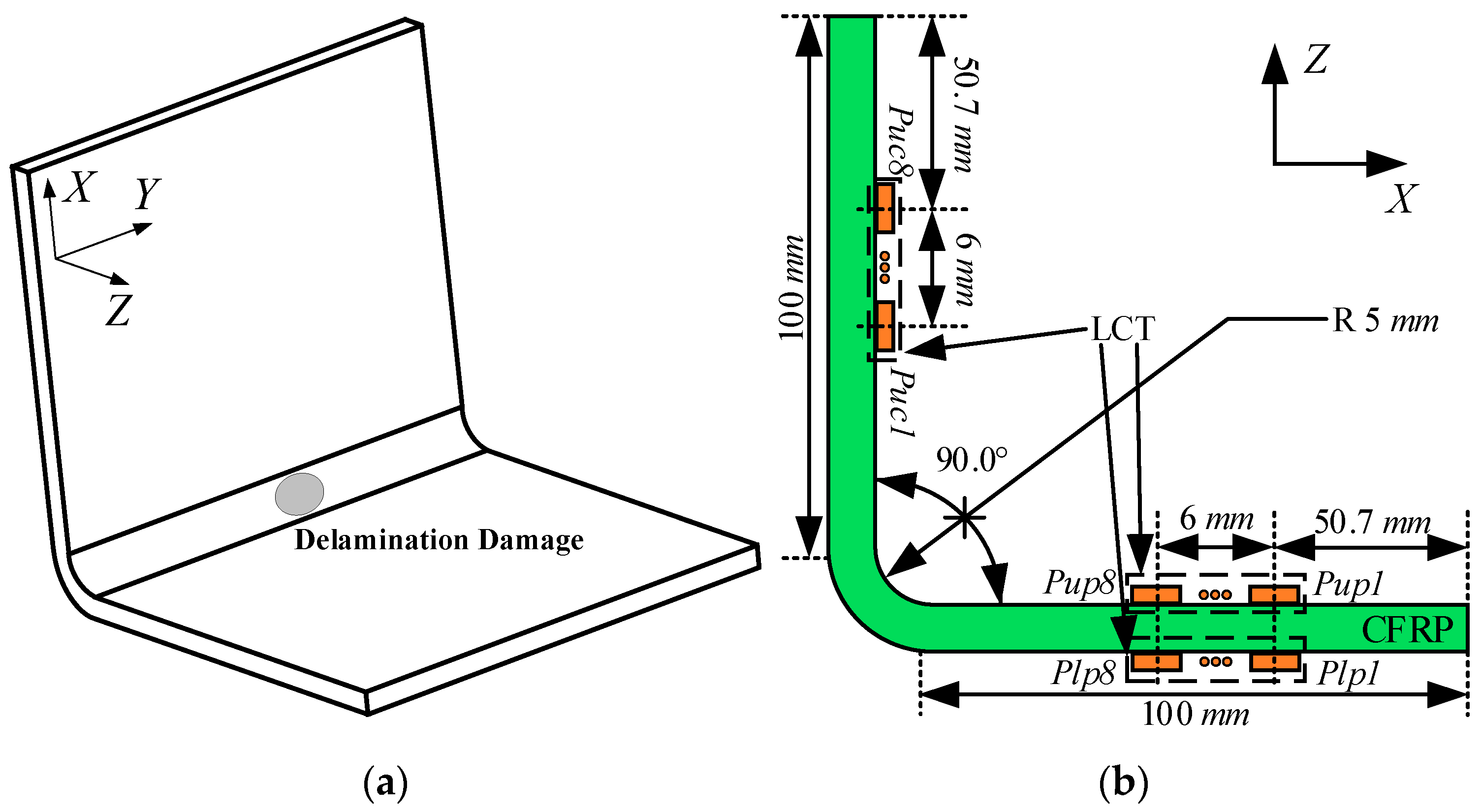
Figure 3.
The dispersion curve of CFRP: (a) Phase velocity; (b) Group velocity.
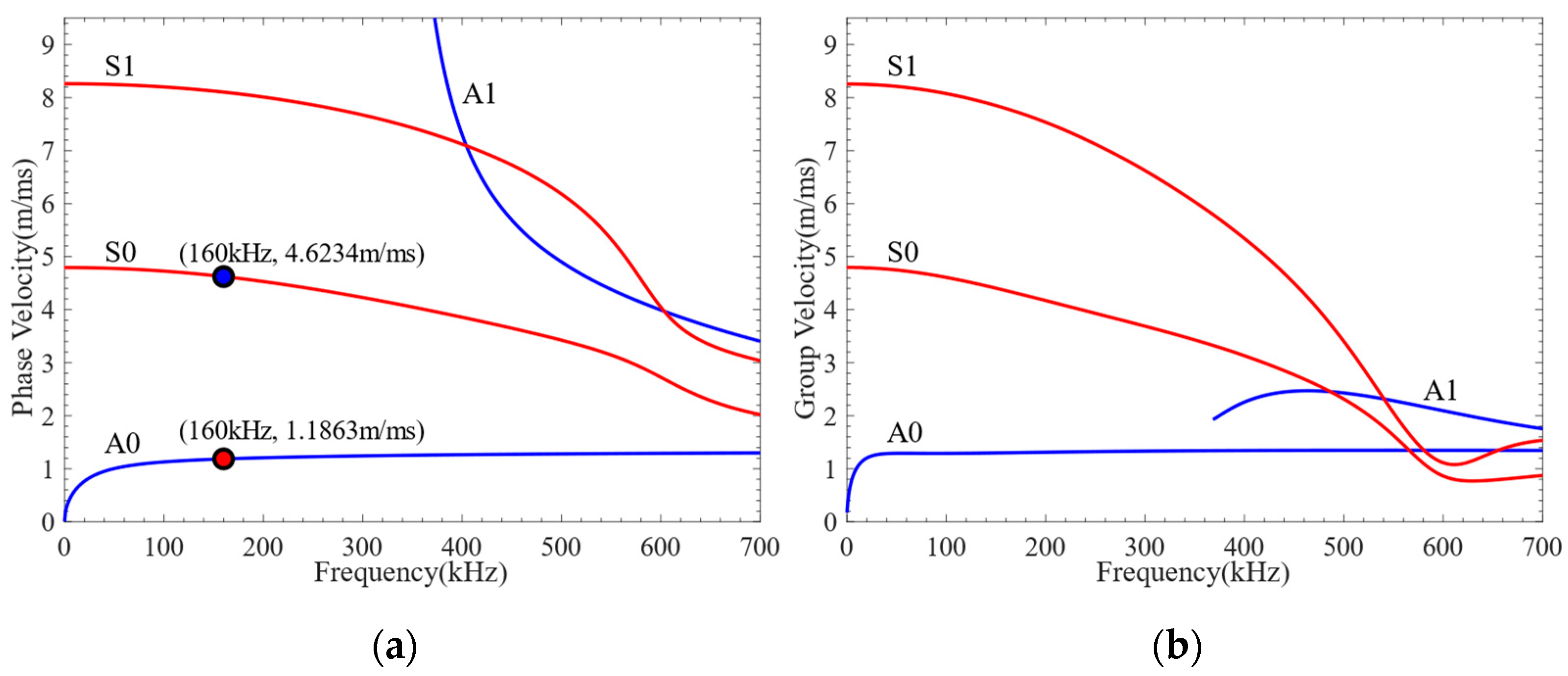
Figure 4.
The through-thickness displacement profiles of Lamb waves propagating in CFRP: (a) A0 mode Lamb wave; (b) S0 mode Lamb wave.
Figure 4.
The through-thickness displacement profiles of Lamb waves propagating in CFRP: (a) A0 mode Lamb wave; (b) S0 mode Lamb wave.
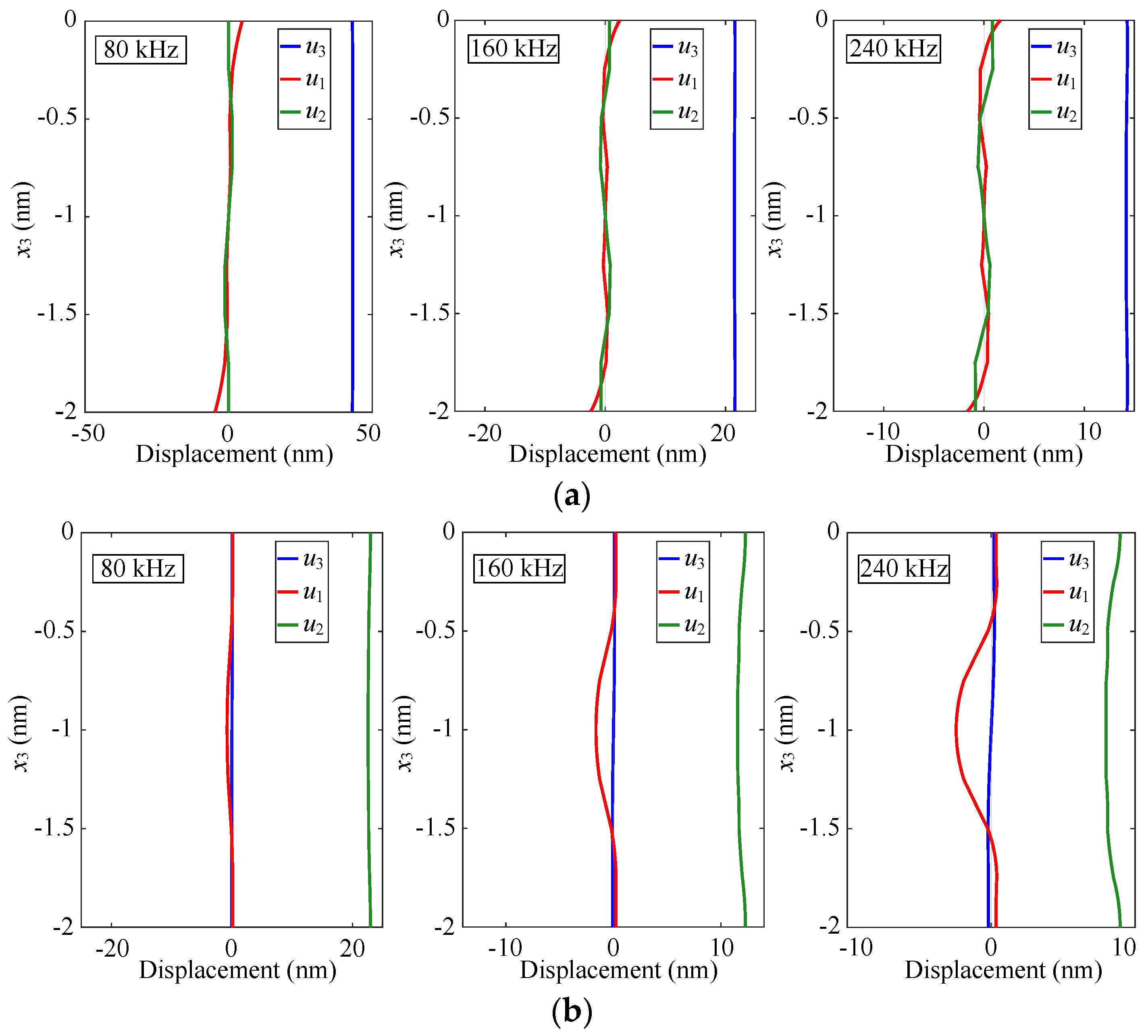
Figure 5.
Excitation signal.
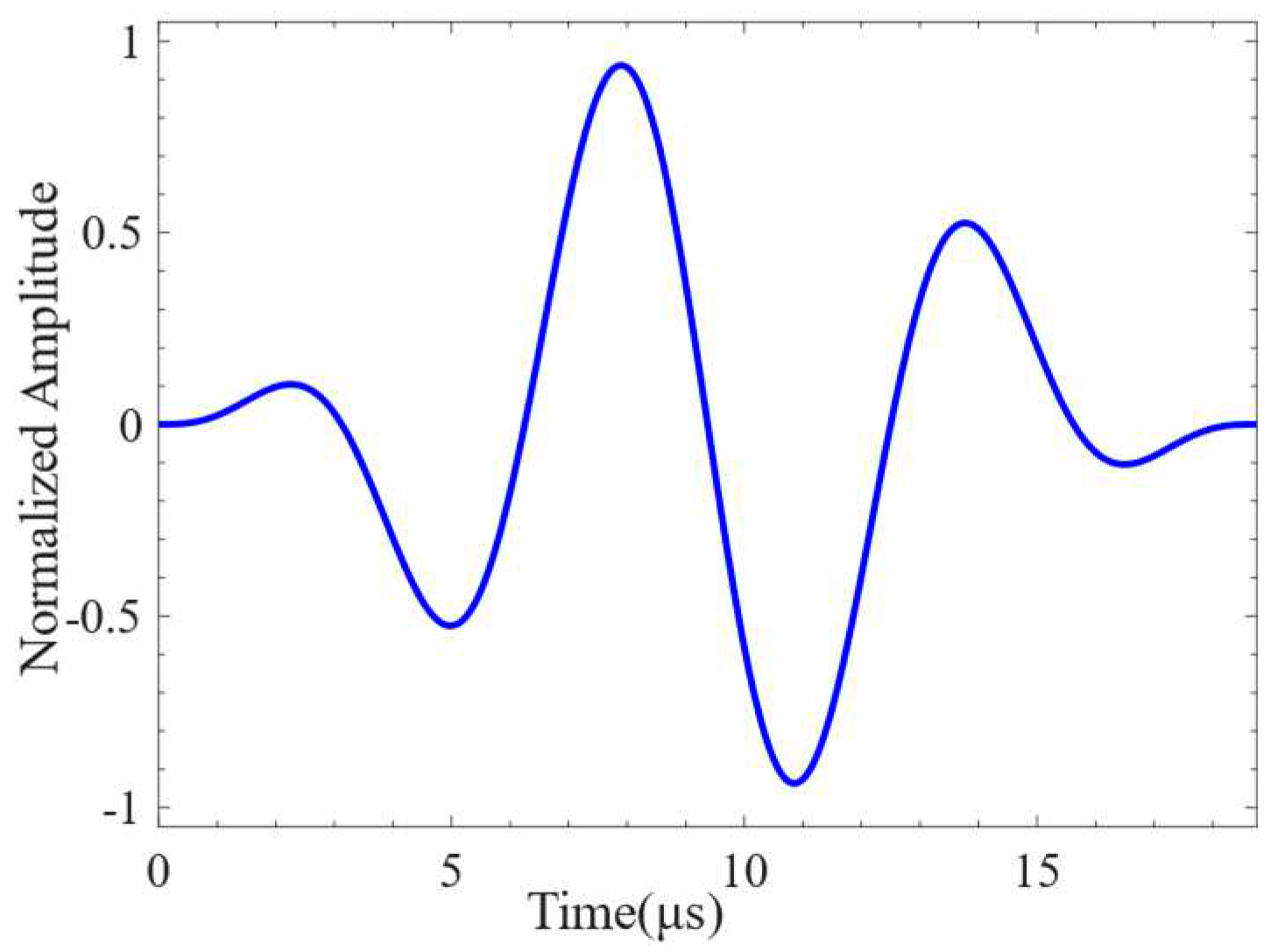
Figure 6.
The computational model of mesh independence verification.

Figure 7.
Lamb wave signal received at point P2: (a) Time-domain signal; (b) CWTC of the signal.
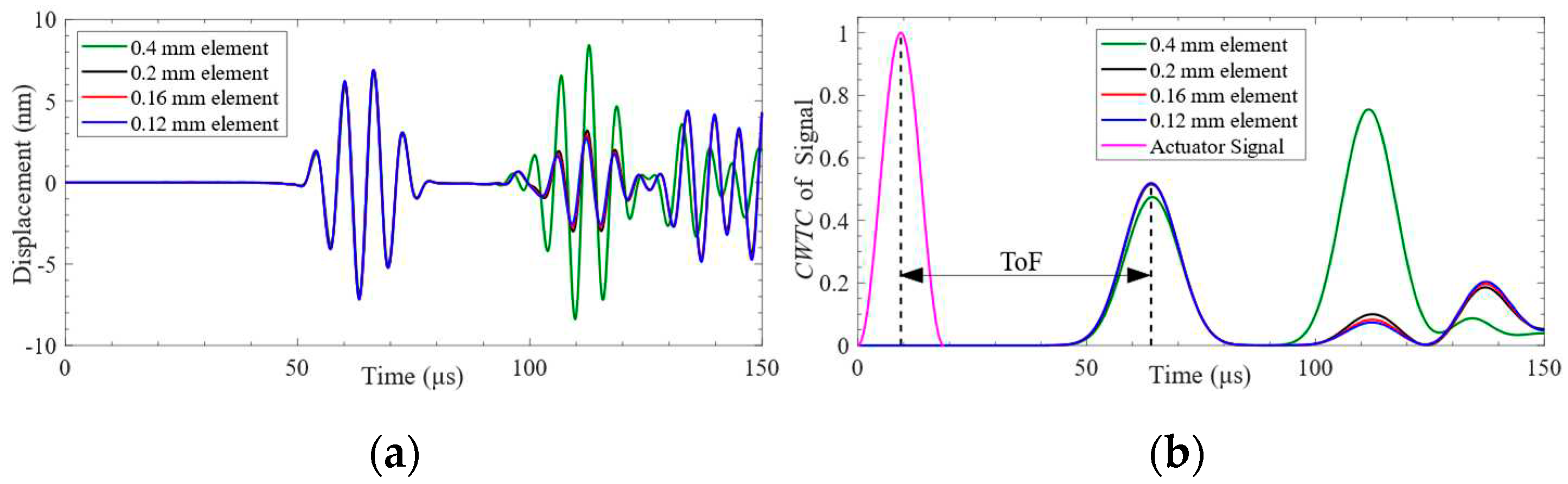
Figure 8.
The characteristics of Lamb waves under different mesh element sizes: (a) ToF of the signal; (b) Normalized signal mean.
Figure 8.
The characteristics of Lamb waves under different mesh element sizes: (a) ToF of the signal; (b) Normalized signal mean.
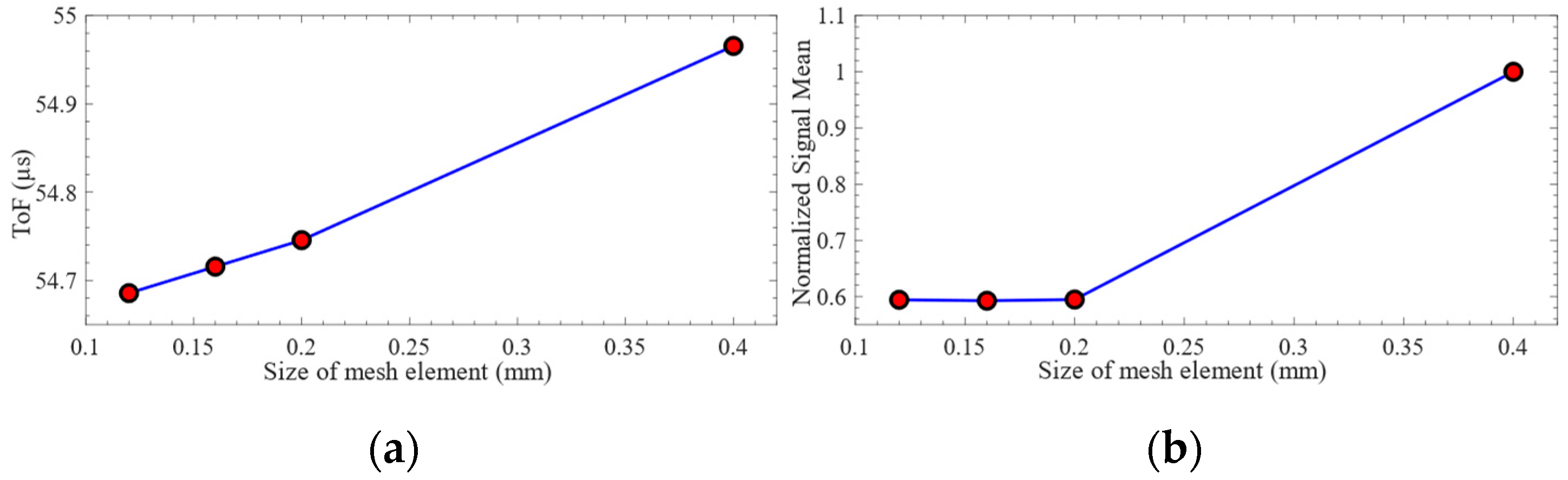
Figure 9.
Schematic diagram of PZT array element distribution of LCT.
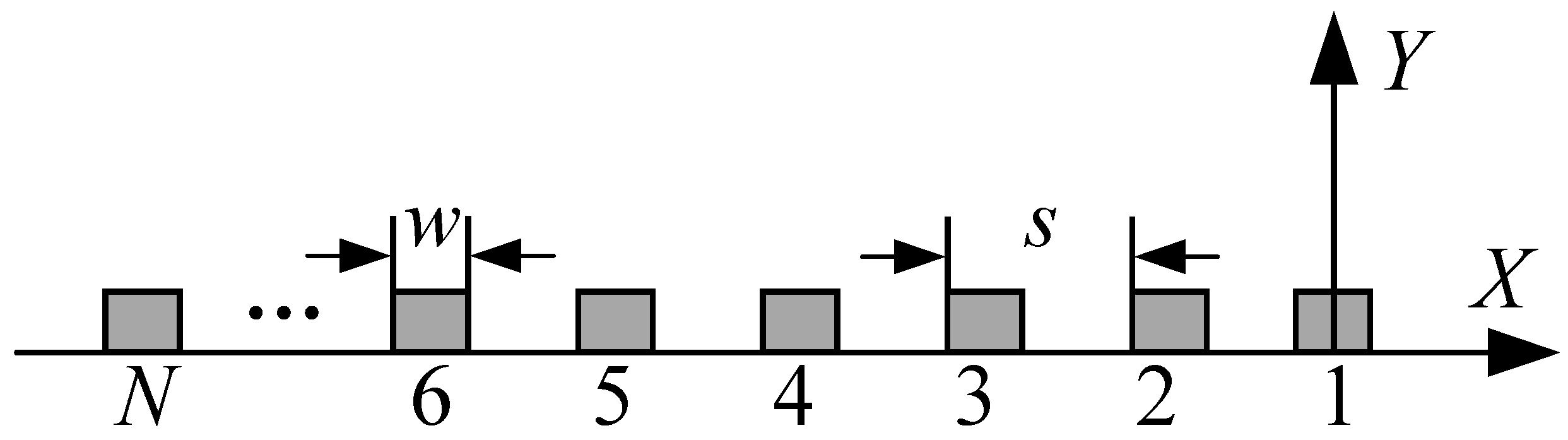
Figure 10.
Computational model for Lamb wave mode control.
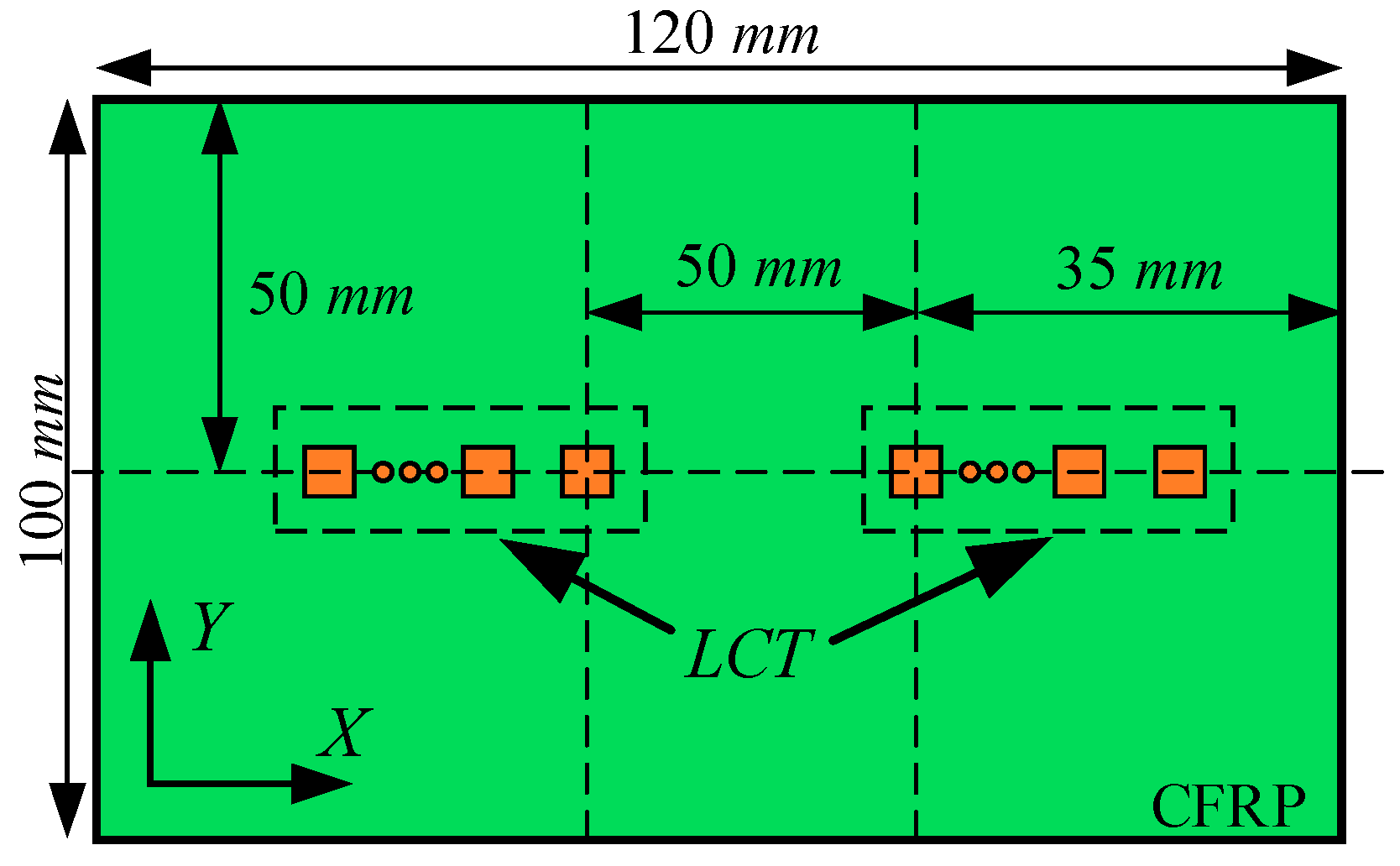
Figure 11.
The paste schematic diagram of LCT.
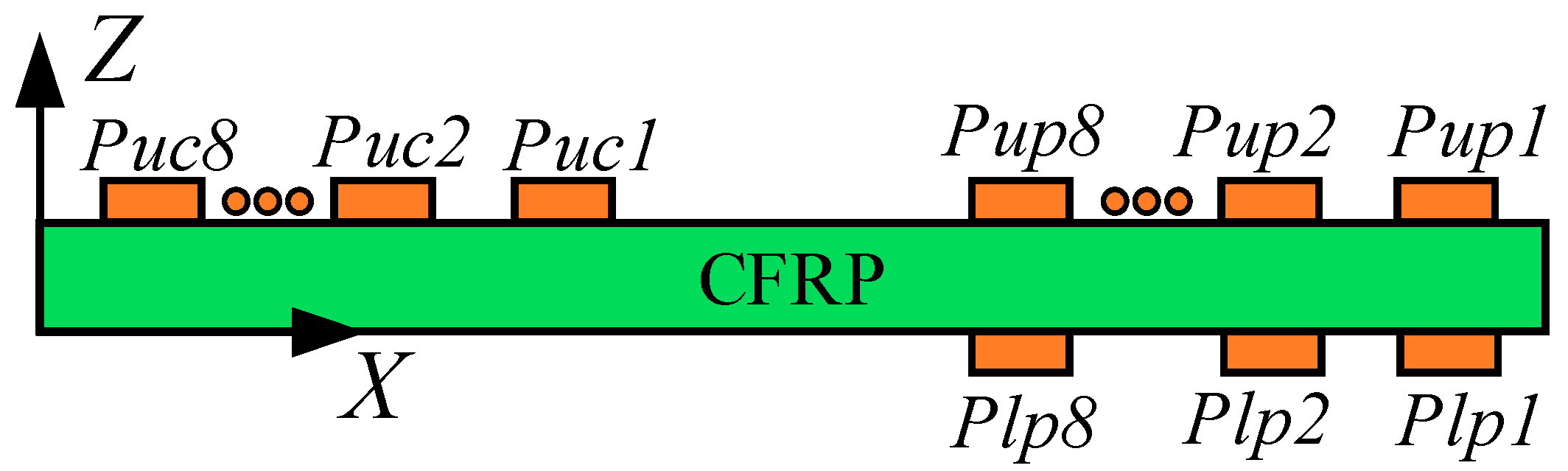
Figure 12.
Phase time-delay of excitation element and receiving element.
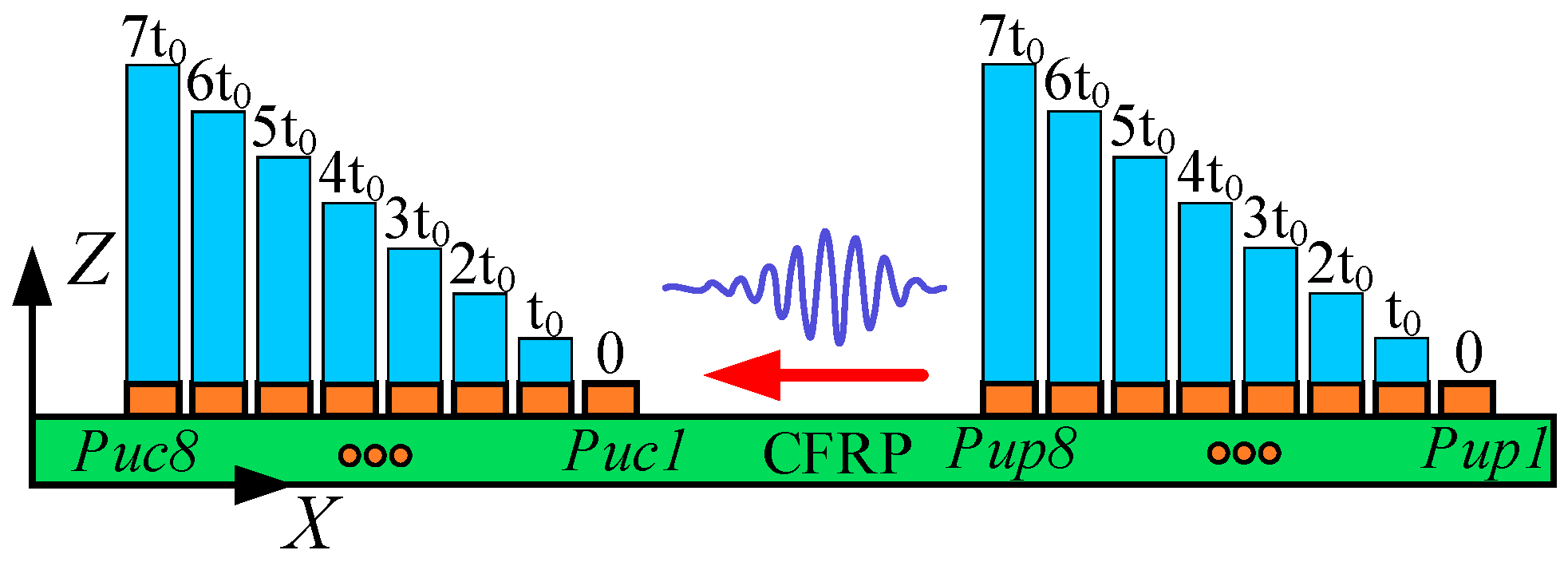
Figure 13.
The excitation signals loaded on each excitation element: (a) The excitation signals were used to excite the A0 mode Lamb wave; (b) The excitation signals were used to excite the S0 mode Lamb wave.
Figure 13.
The excitation signals loaded on each excitation element: (a) The excitation signals were used to excite the A0 mode Lamb wave; (b) The excitation signals were used to excite the S0 mode Lamb wave.
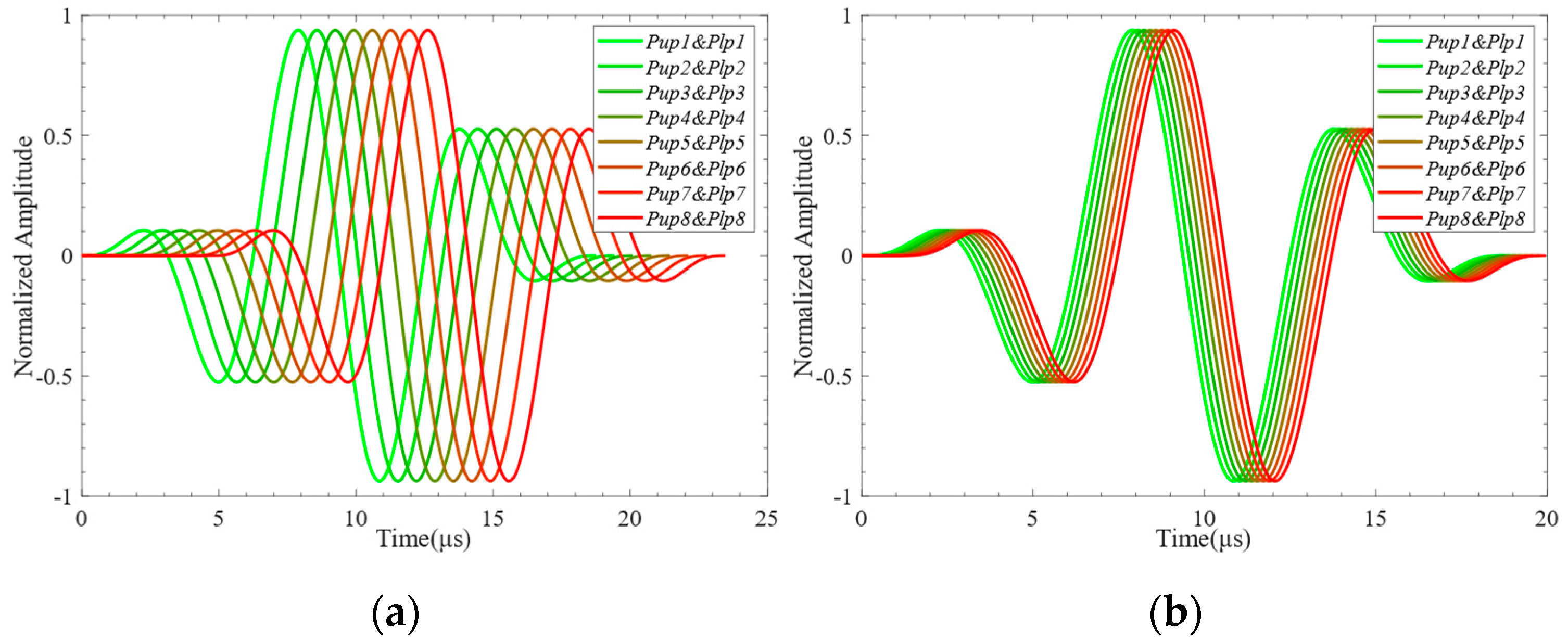
Figure 14.
Propagation of Lamb wave signal: (a) A0 mode Lamb wave; (b) S0 mode Lamb wave.

Figure 15.
The surface average voltage signal received by the receiver: (a) A0 mode; (b) S0 mode.
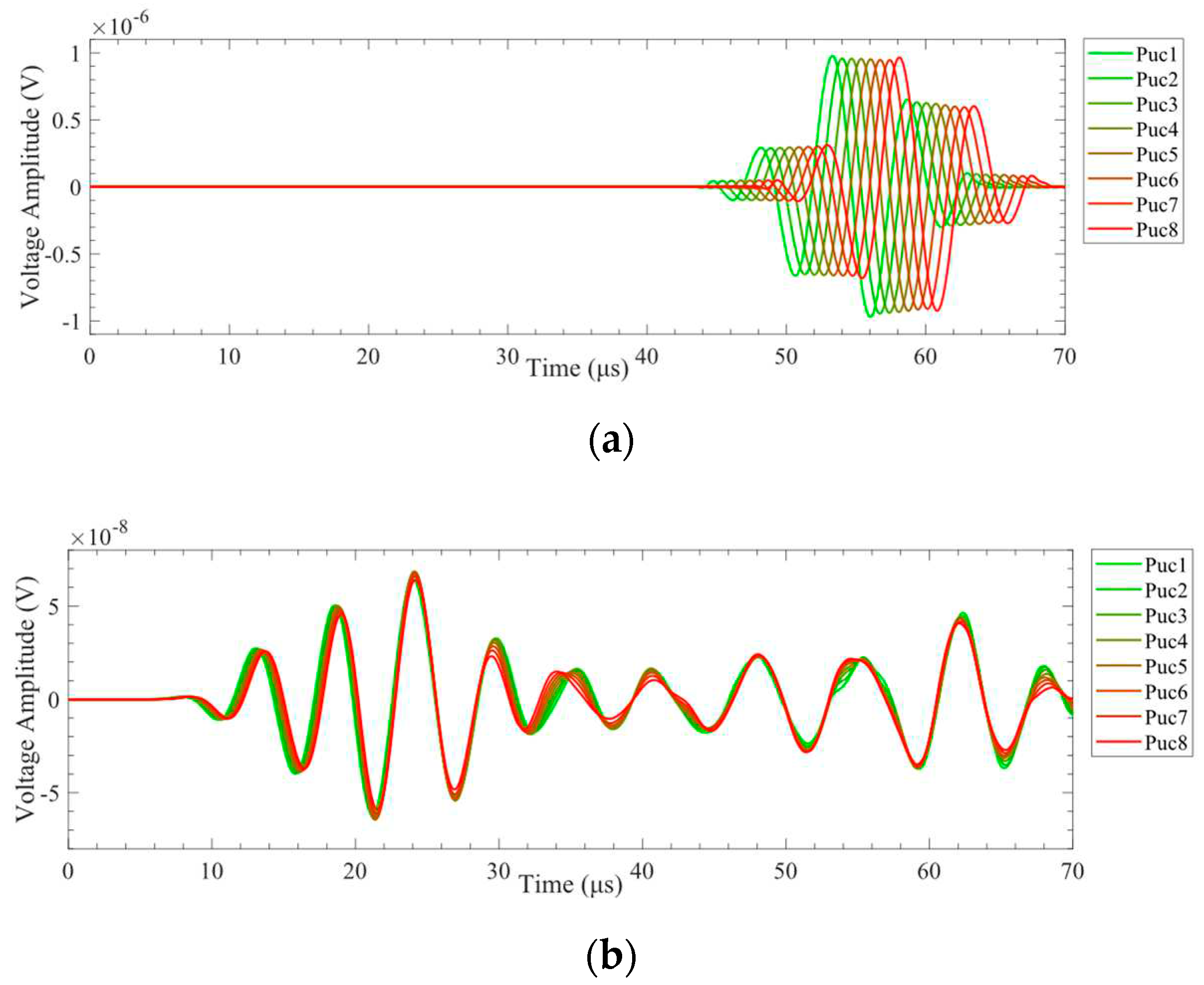
Figure 16.
Time-delay superimposed signal: (a) A0 mode; (b) S0 mode.
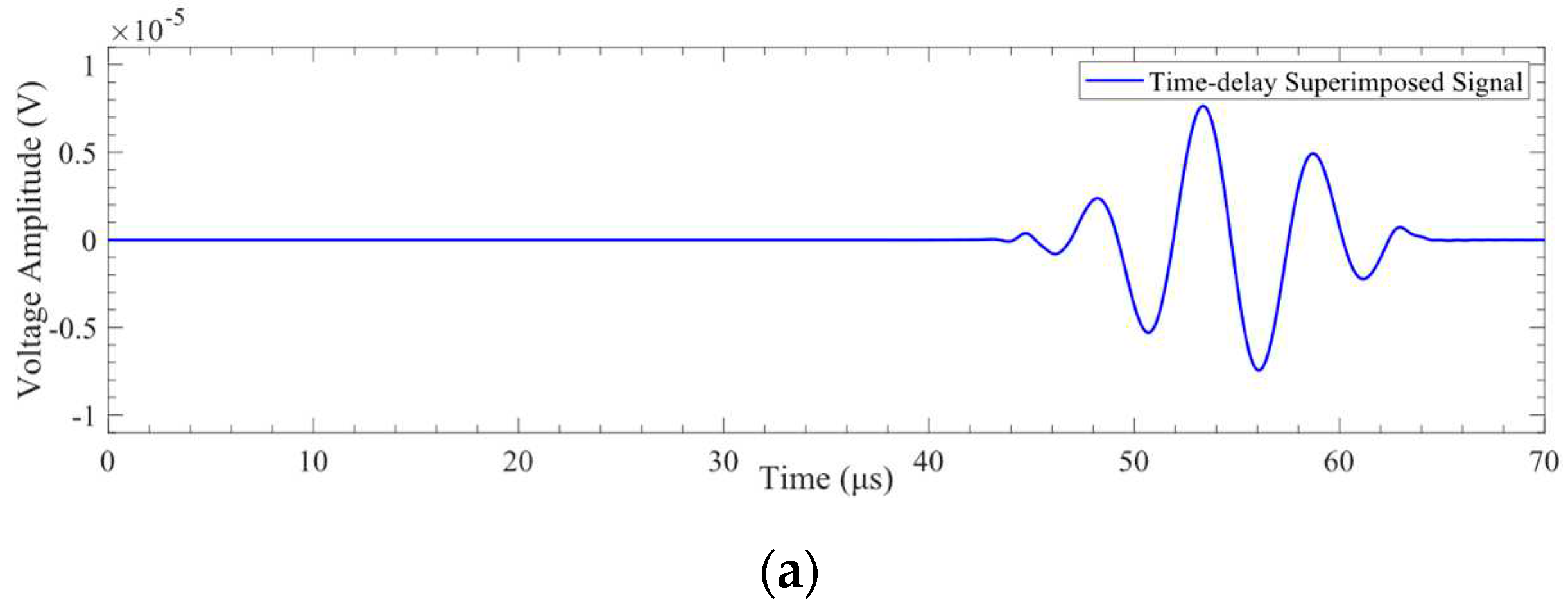
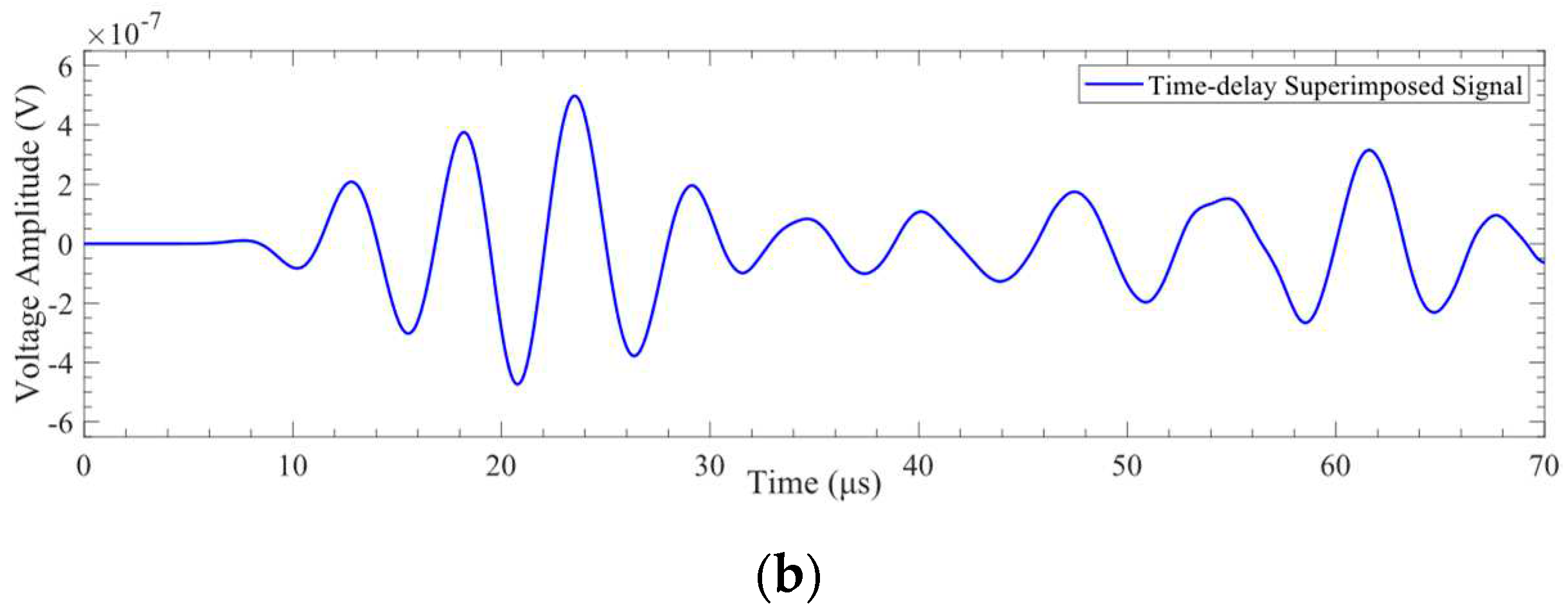
Figure 17.
CWTC of time-delay superimposed voltage signal: (a) A0 mode; (b) S0 mode.
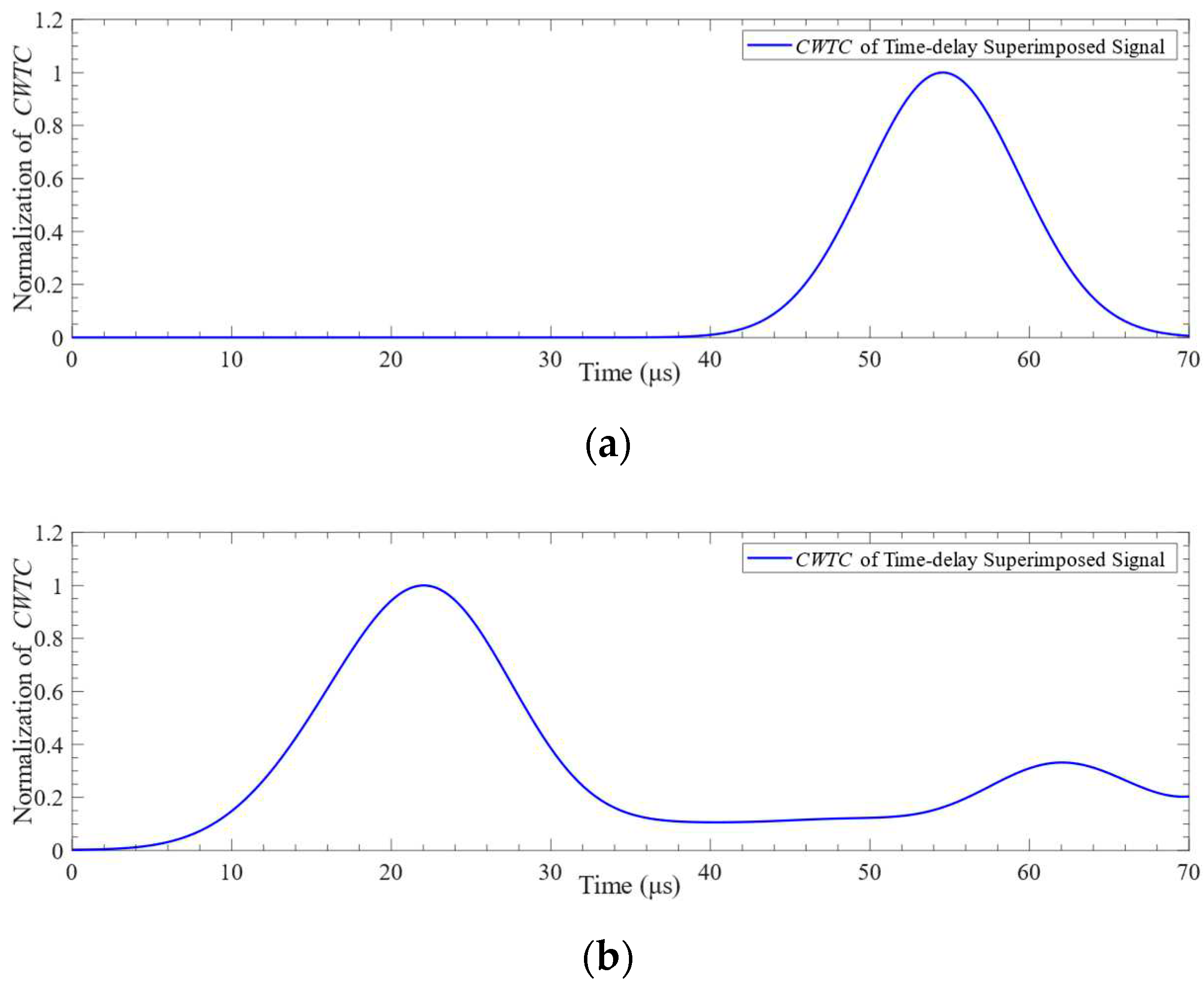
Figure 18.
Verification of group velocity.
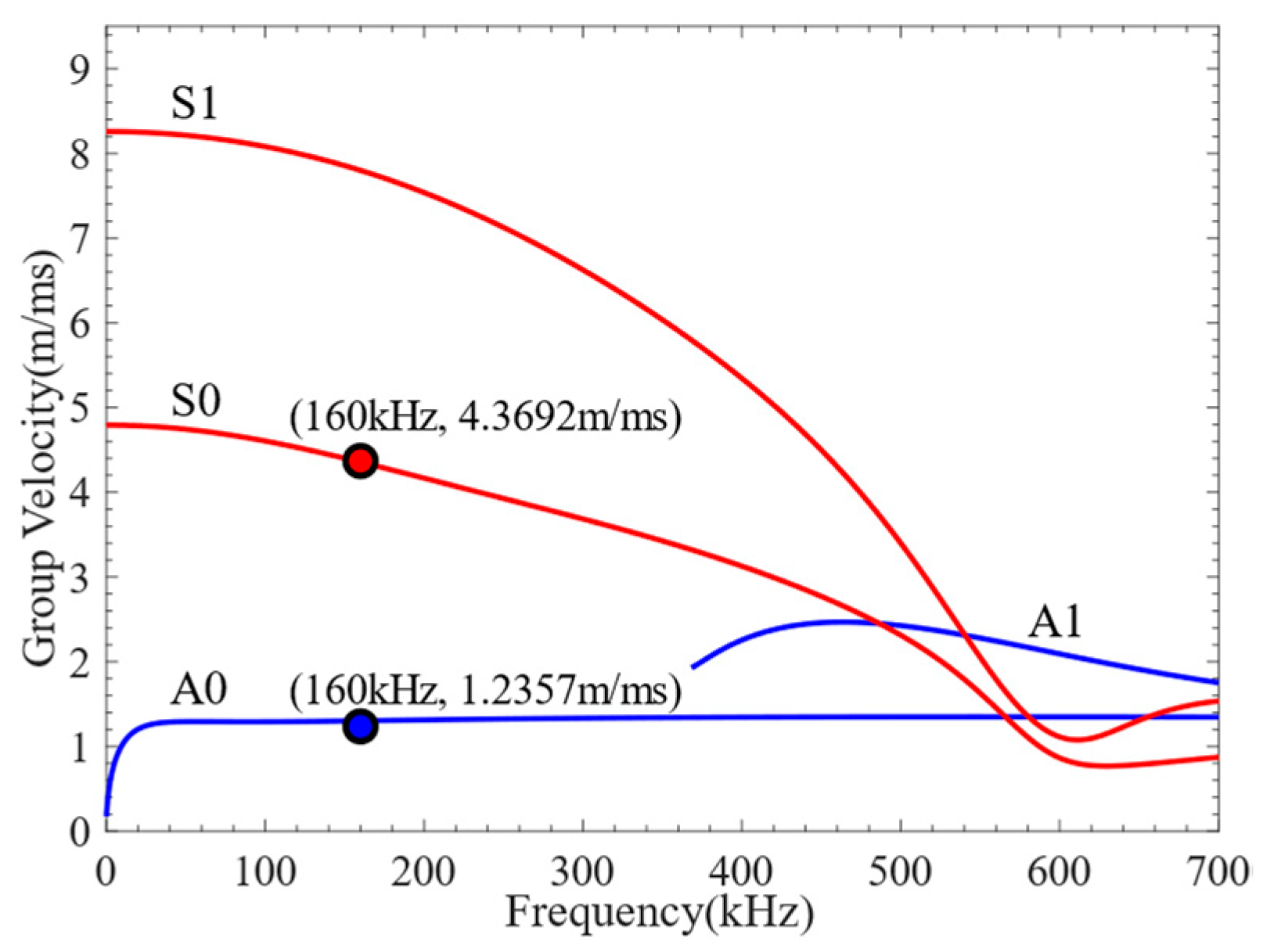
Figure 19.
Schematic diagram of zero-volume delamination damage modeling method. (Two new red nodes are generated by the original node in the delamination damage area, and the volume of the delamination damage is exaggerated to highlight the two new red nodes.).
Figure 19.
Schematic diagram of zero-volume delamination damage modeling method. (Two new red nodes are generated by the original node in the delamination damage area, and the volume of the delamination damage is exaggerated to highlight the two new red nodes.).
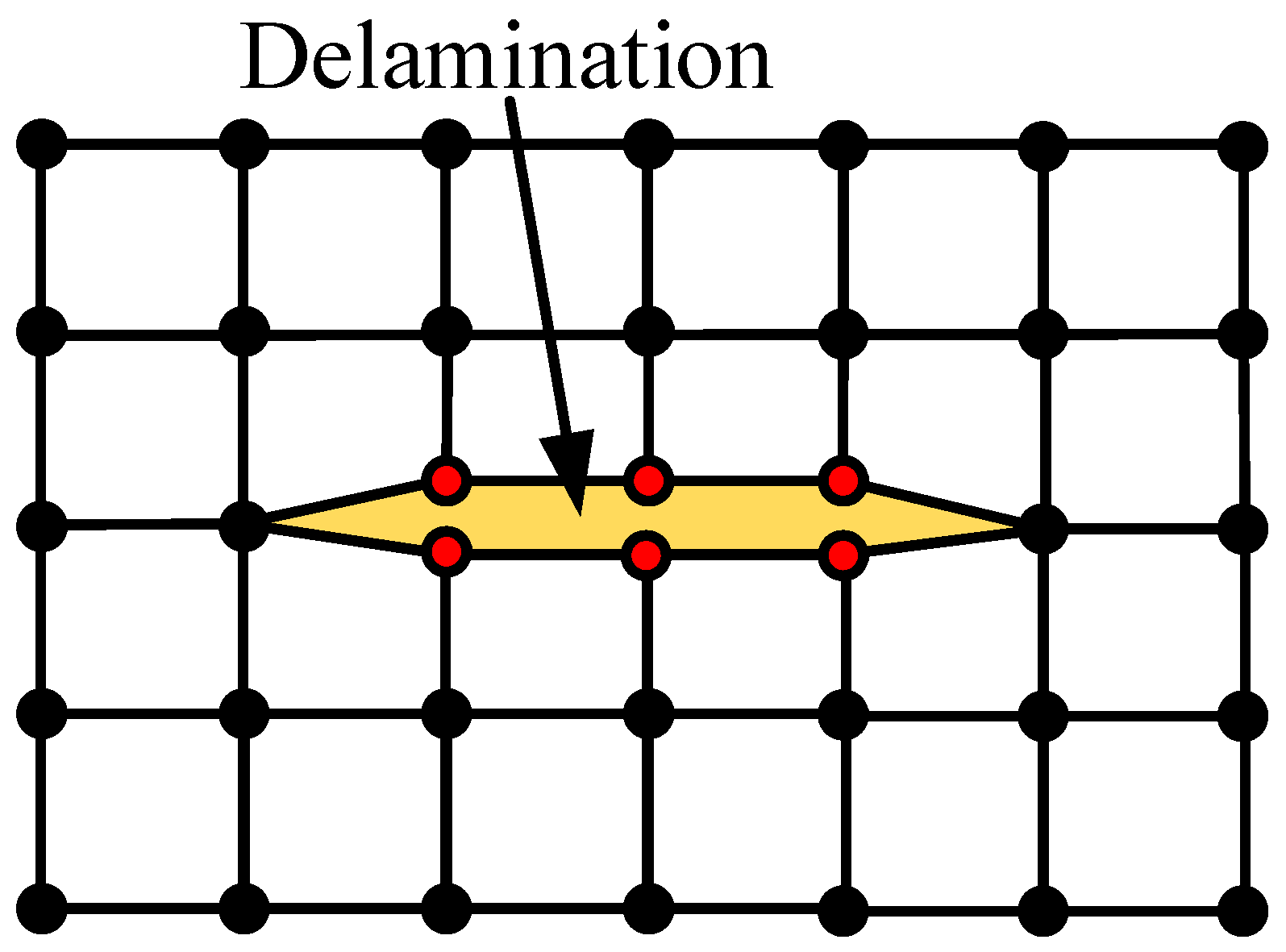
Figure 20.
Time-delay superimposed voltage signal of delamination damage: (a) Delamination damage time-delay superimposed voltage signal in A0 mode; (b) Delamination damage time-delay superimposed voltage signal in S0 mode.
Figure 20.
Time-delay superimposed voltage signal of delamination damage: (a) Delamination damage time-delay superimposed voltage signal in A0 mode; (b) Delamination damage time-delay superimposed voltage signal in S0 mode.
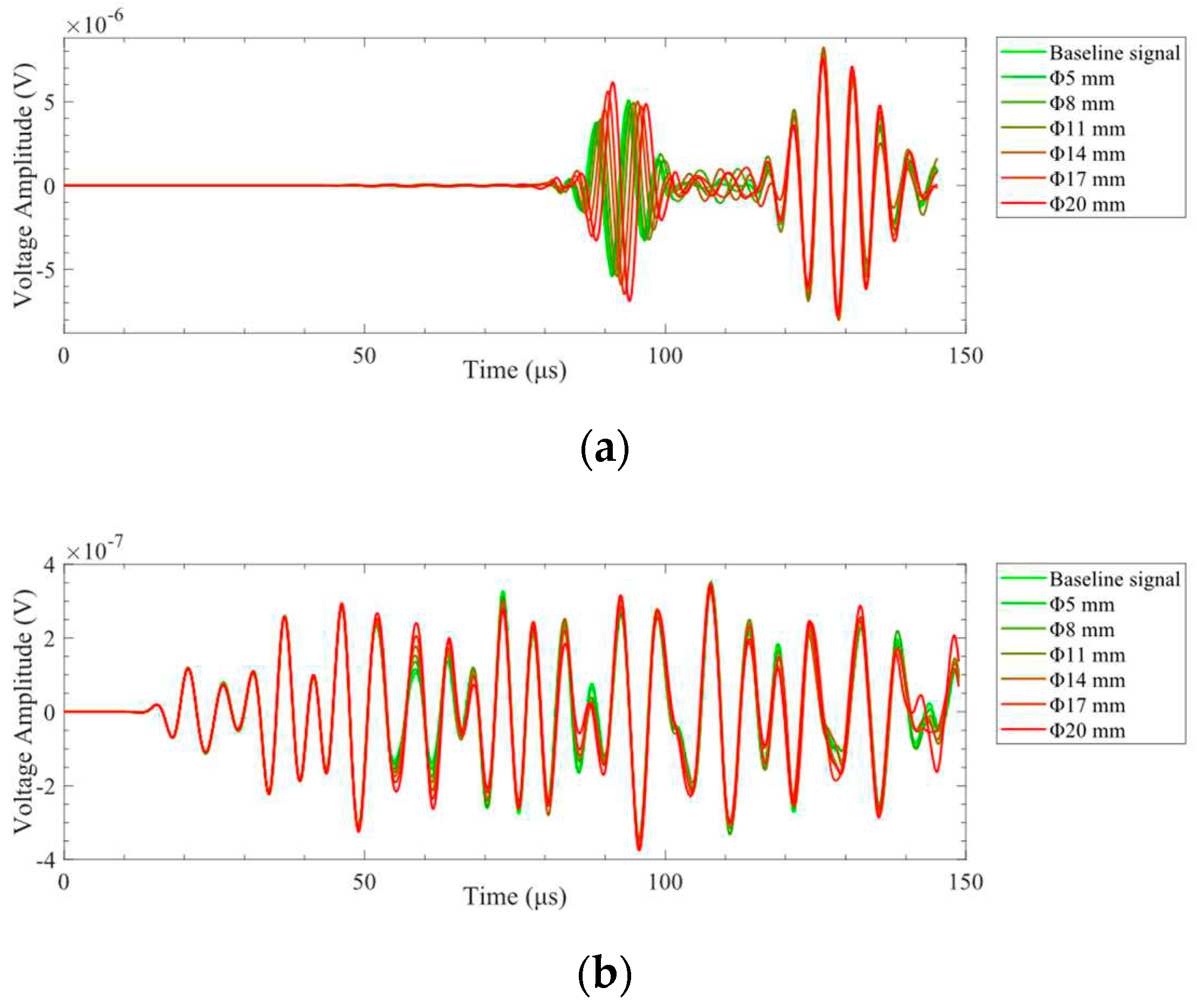
Figure 22.
The structure diagram of the LCT.
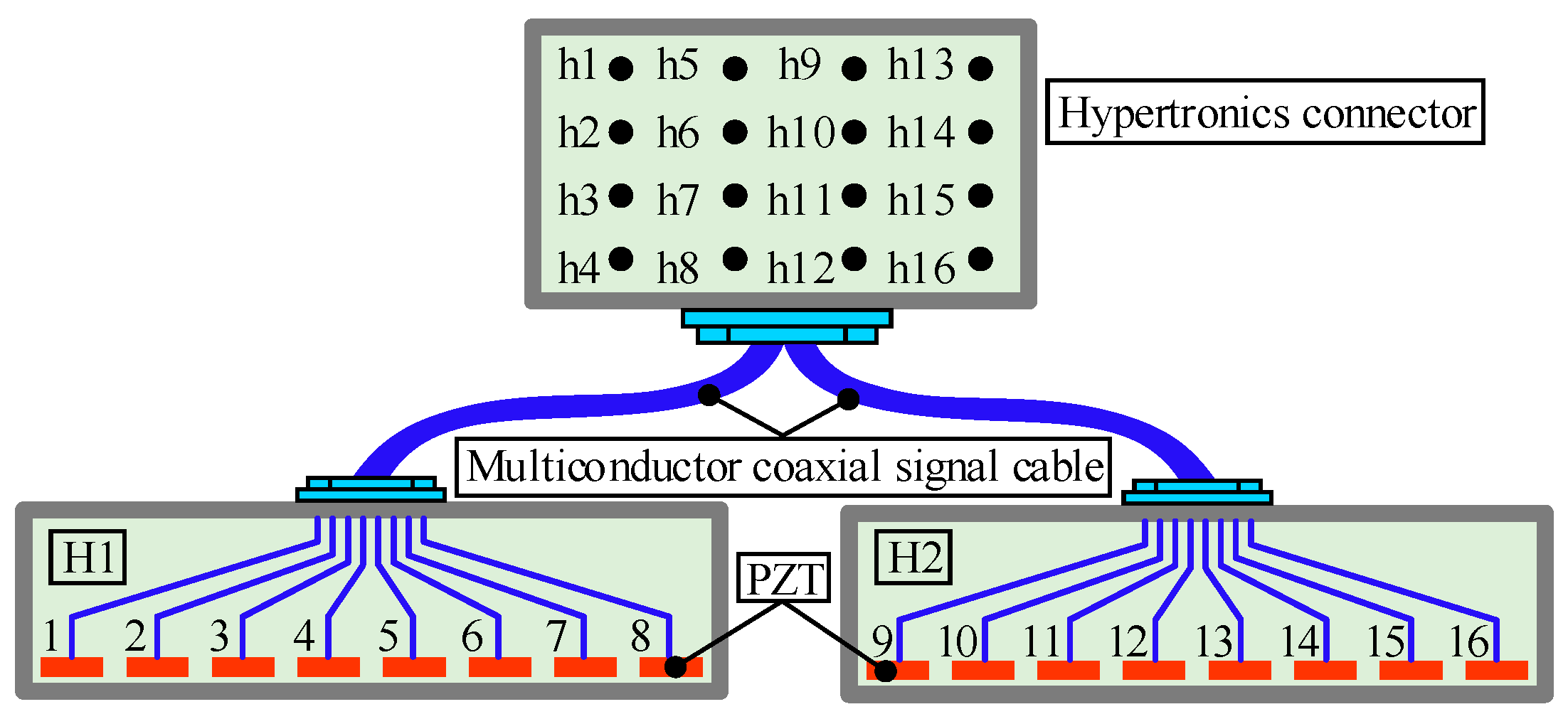
Figure 23.
The miniaturized LCT product.

Figure 24.
CFRP bending plate specimens.
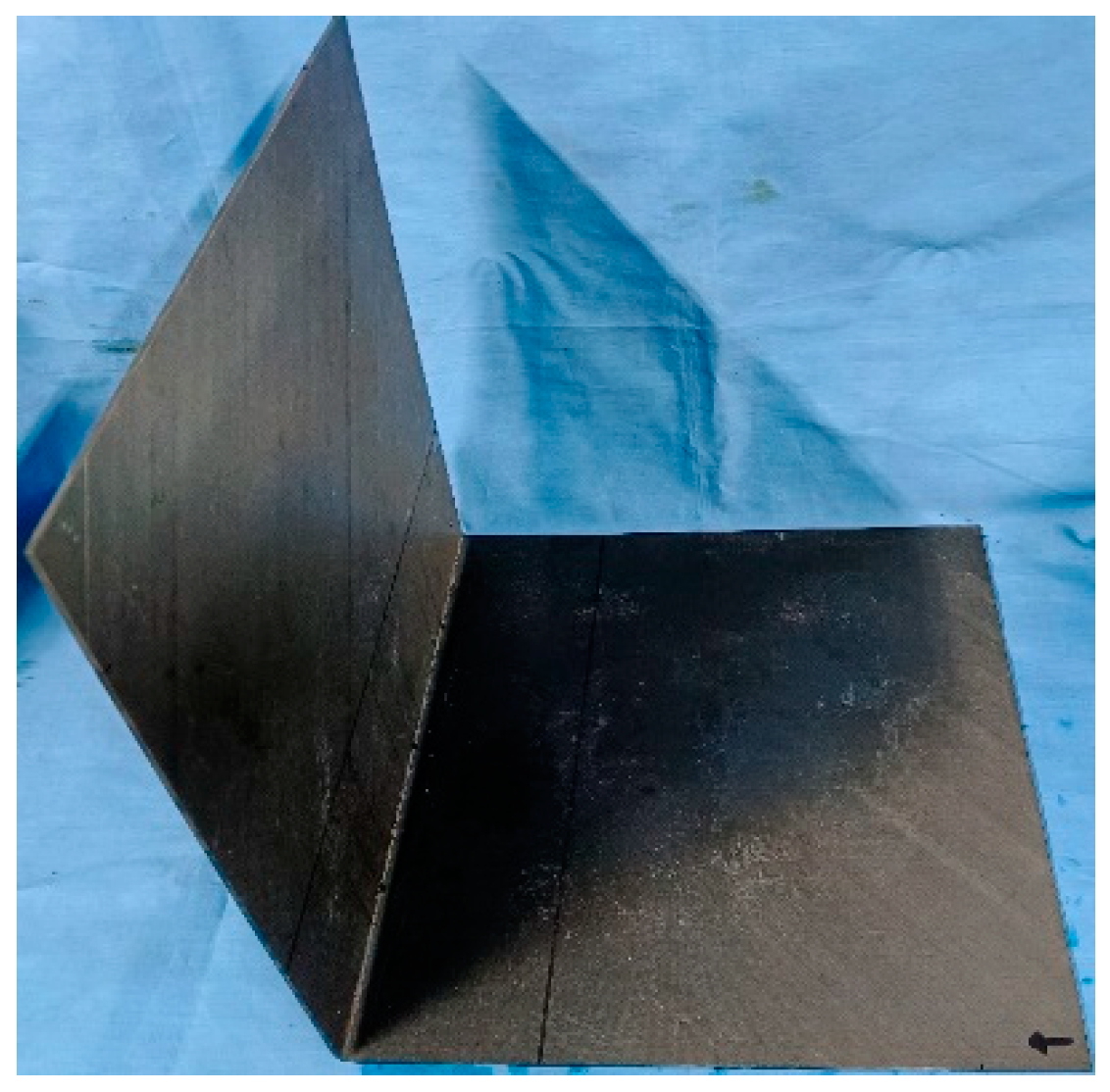
Figure 25.
The Lamb wave phased array detection system.
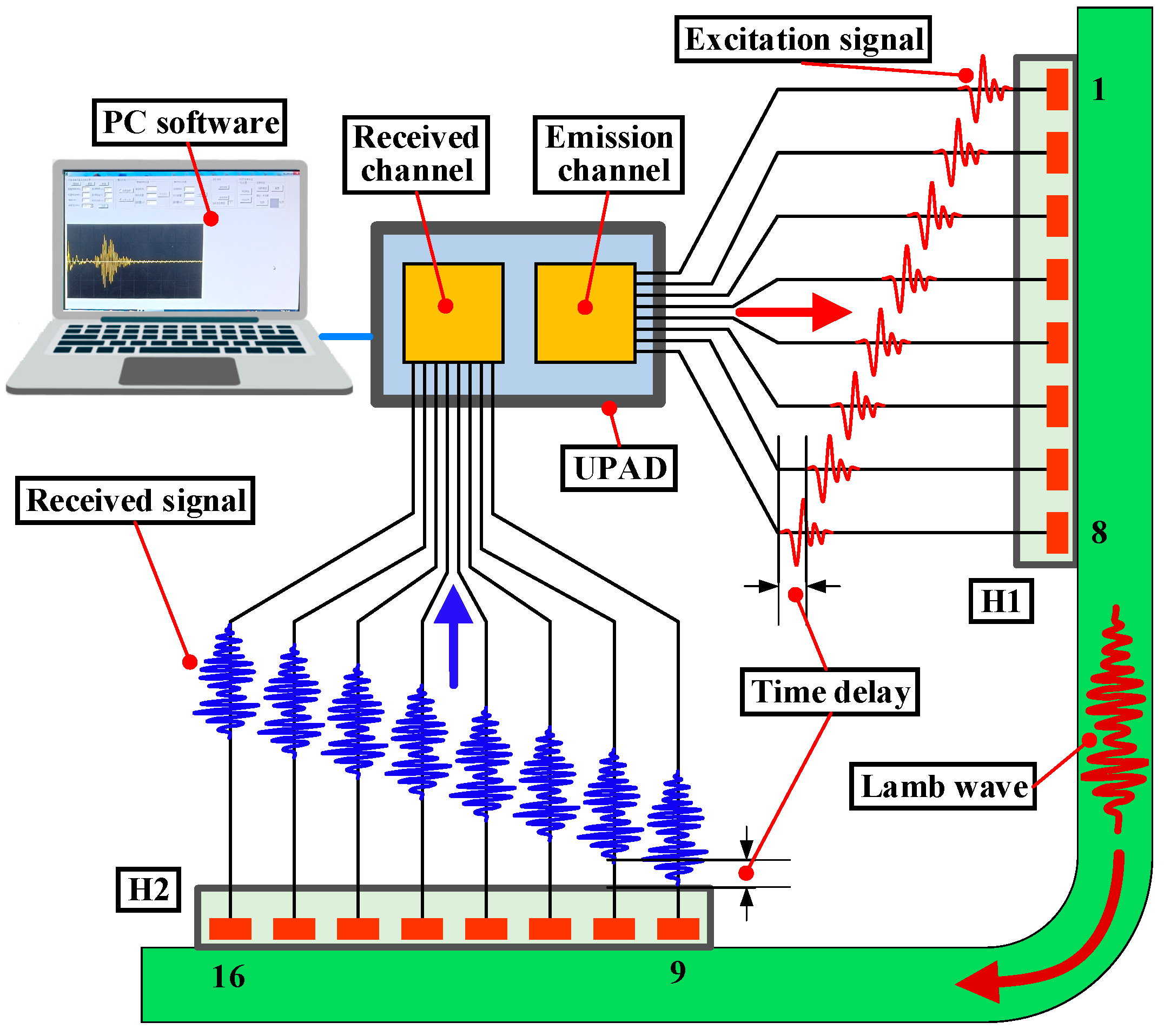
Figure 26.
Experimental system.
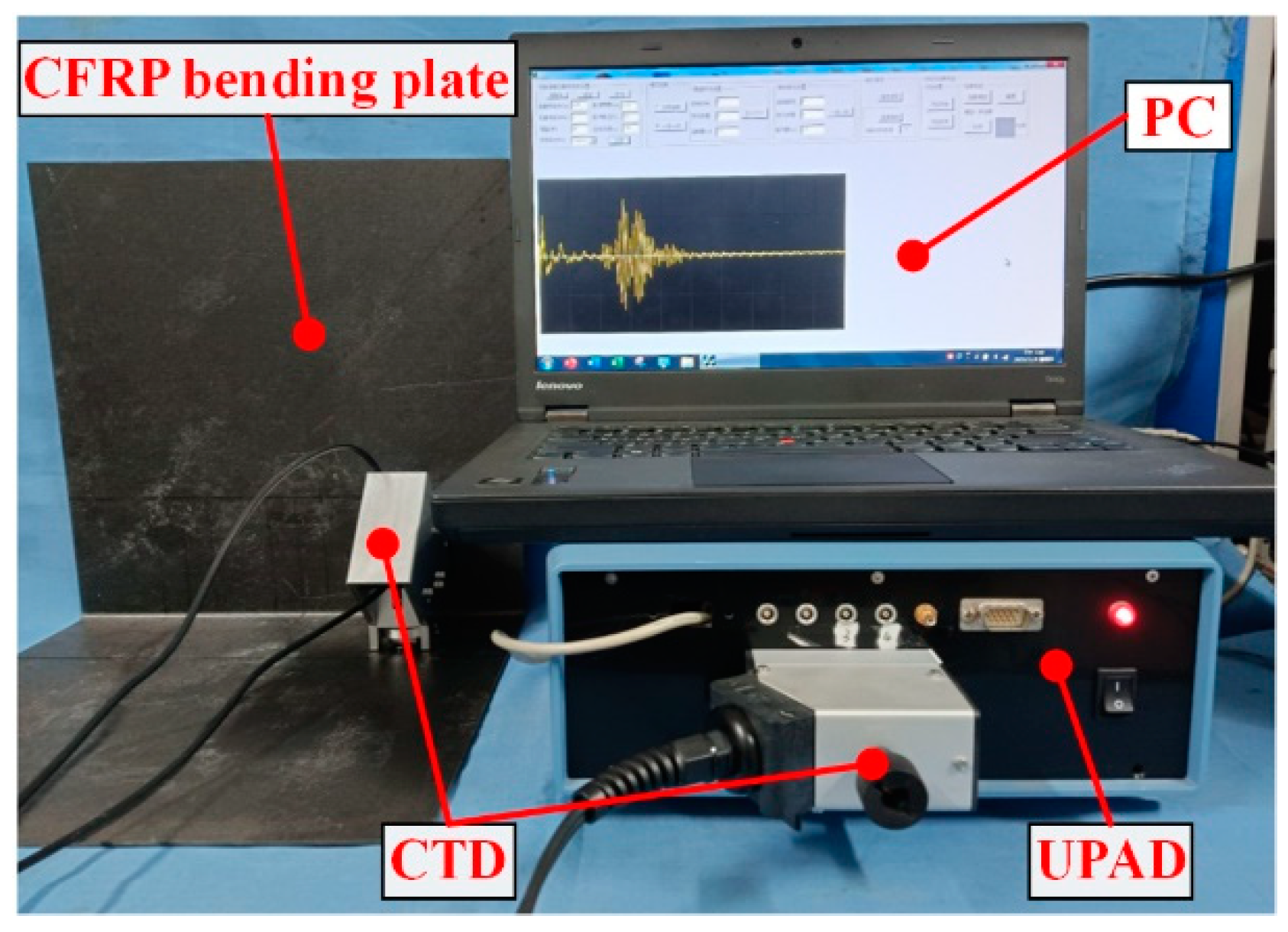
Figure 27.
Signals with and without time delay.
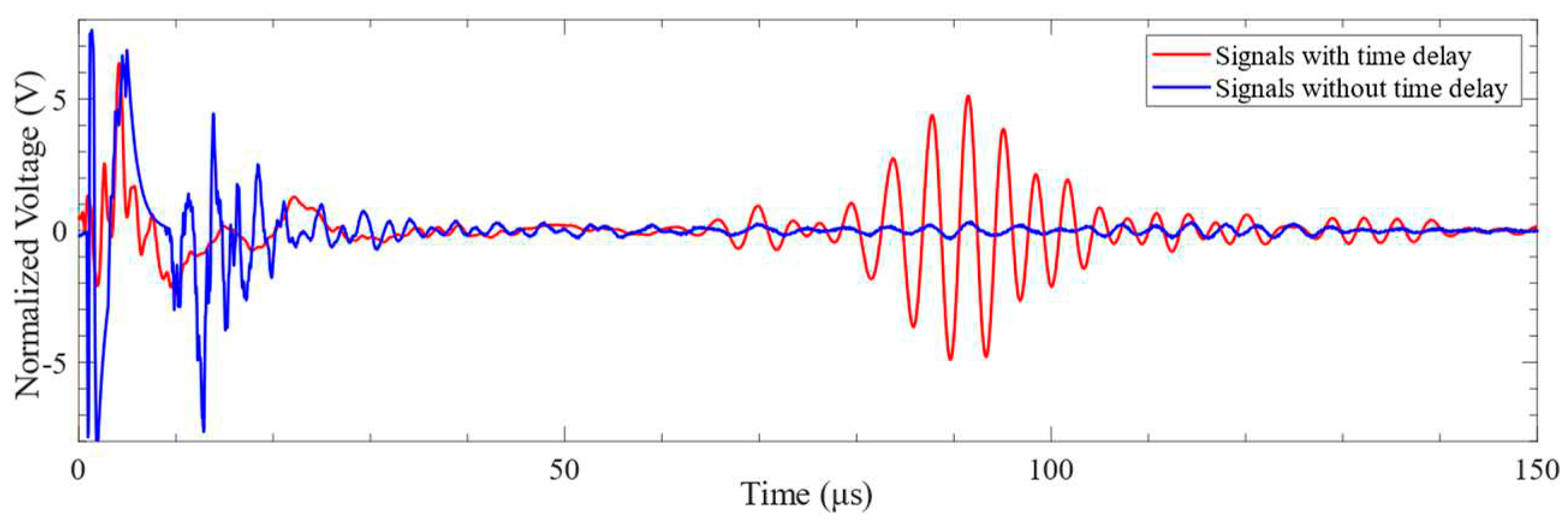
Figure 28.
Time domain signals of A0 mode Lamb waves with different delamination damage sizes.
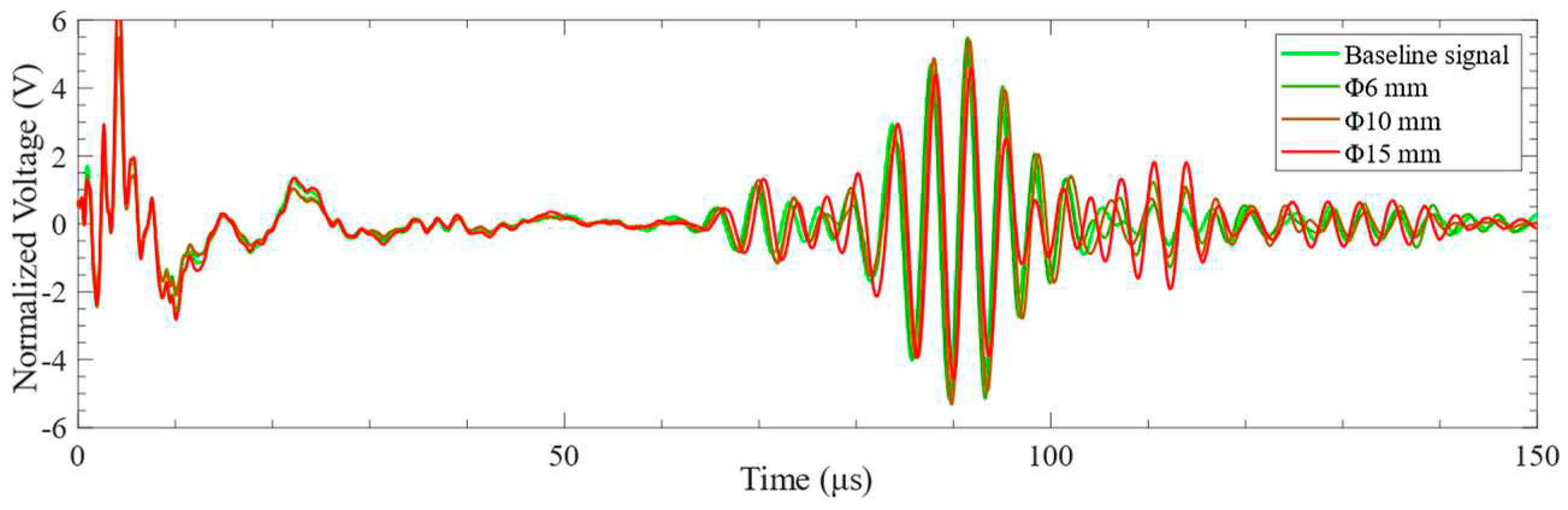
Figure 29.
The SDC values of different delamination damage sizes.
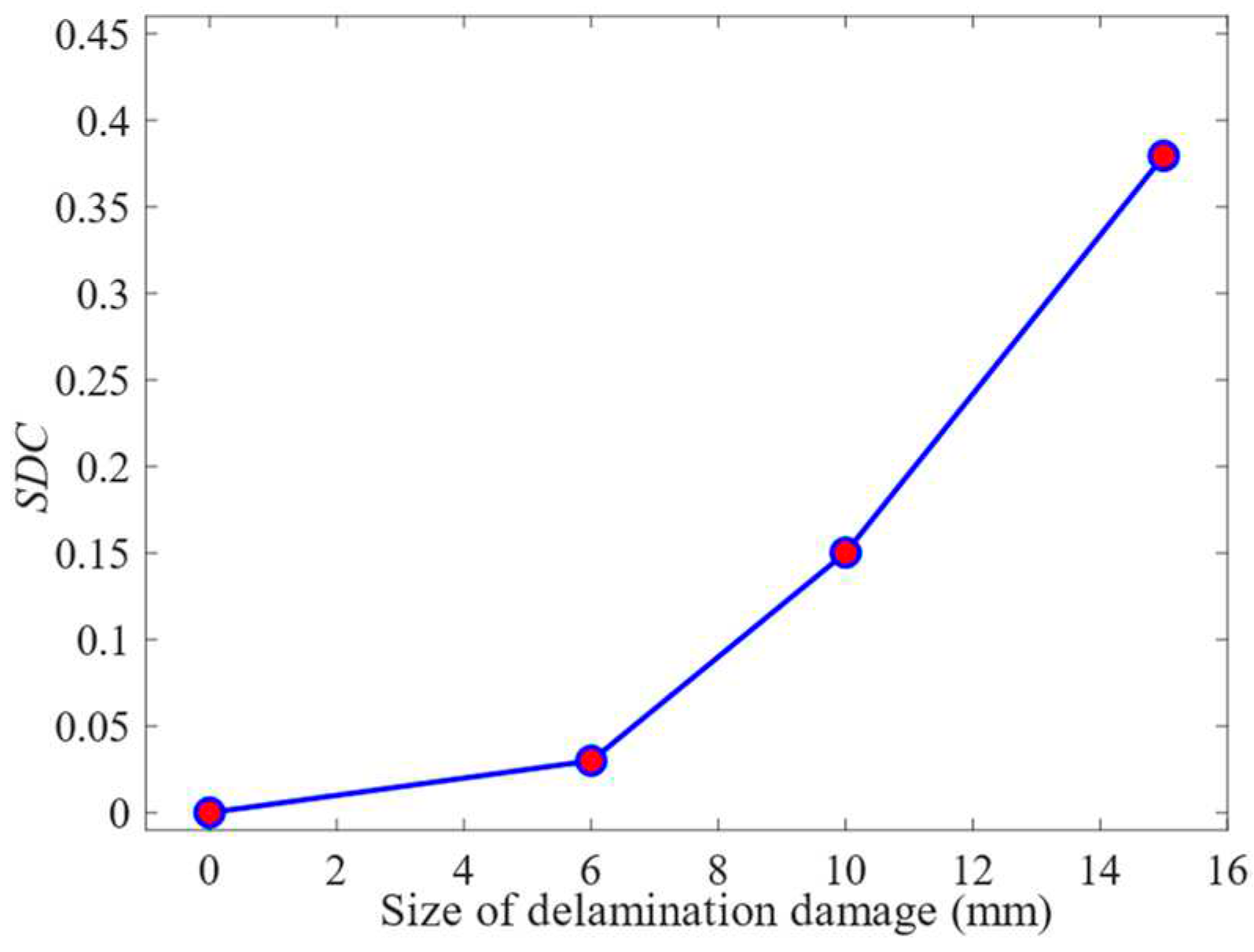

Table 1.
The properties of CFRP materials in the numerical simulation study.
| E1(GPa) | E2 = E3(GPa) | G12 = G13(GPa) | G23(GPa) | ν12 = ν13 | ν23 | ρ(kg/m3) |
|---|---|---|---|---|---|---|
| 280.0 | 10.0 | 4.0 | 2.0 | 0.28 | 0.45 | 1639.0 |
Table 2.
The stiffness coefficient of PZT-5H.
| D1111 = D2222(MPa) | D3333(MPa) | D1122(MPa) | D1133 = D2233(MPa) | D1212 = D1313(MPa) | D2323(MPa) |
|---|---|---|---|---|---|
| 127205.0 | 117436.0 | 80212.2 | 84670.2 | 22988.5 | 23474.2 |
Table 3.
The piezoelectric coefficient of PZT-5H.
| d3 11 = d3 22(10−12C/N) | d3 33(10−12C/N) | d2 12 = d1 13(10−12C/N) |
|---|---|---|
| -274.0 | 593.0 | 741.0 |
Table 4.
The relative dielectric constant of PZT-5H.
| D11 | D22 | D33 |
|---|---|---|
| 1704.4 | 1704.4 | 1433.6 |
Table 5.
The simulation results and theoretical calculation results of group velocity.
| A0 | S0 | |
|---|---|---|
| simulate group velocity (m/s) | 1235.7 | 4369.2 |
| theoretical group velocity (m/s) | 1302.1 | 4359.4 |
| absolute error (m/s) | 66.4 | 9.8 |
| percentage error (%) | 5.1 | 0.2 |
Table 6.
The error of the fitting expression to the delamination damage quantification.
| Delamination Damage Size (mm) |
Measured Value (mm) |
Absolute Error (mm) |
Percentage Error (%) |
|---|---|---|---|
| 6.0 | 6.3 | 0.3 | 5.0 |
| 10.0 | 10.8 | 0.8 | 8.0 |
| 15.0 | 14.3 | 0.7 | 4.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



