Submitted:
04 April 2023
Posted:
04 April 2023
You are already at the latest version
Abstract
Illegal removal of road barricades without the notice of road emergency officials and road users has resulted in fatalities, injuries, and property damages. It is only after an incident has occurred or someone noticed the removal and alerted the authorities for the barricade to be placed back at its intended location. There is a need for traditional barricades to be equipped with mechanisms that would alert officials on illegal road barricade removal and warn road users of a road/lane(s) closure to prevent fatalities, injuries, and property damages to the traveling public. This research has used the Global Positioning System (GPS) module to implement the detection of barricade displacement and an alerting system for emergency officials and road users. The barricade displacement was estimated from the haversine distance formula, corrected for errors, and interfaced with the displacement threshold value for the road users within a geofenced area to be alerted. The geofenced area radius was estimated to be 1.04 miles from the barricade location using AASHTO, NSC, and TransGuide ITS manuals. The non-parametric bootstrapping method estimated the GPS position error to 10.5 feet and corrected the measured distances. Data from a clear sunny day shows the best response to barricade movements compared to a cloudy day where movements can’t be explained easily. The proposed monitoring and warning systems would warn road users and alert emergency officials of the danger when the physical barricades have been removed illegally hence saving lives and reducing property damages.
Keywords:
road barricades
; illegal removal
; ITS
; GPS tracking
; road assets
; connected infrastructure
1. Introduction
During emergencies, emergency management officials use barricades to protect the traveling public from impending danger. The barricade(s) may be set up to stop traffic from a washed-out or flooded roadway or bridges. In early October 2015, South Carolina experienced devastating flooding as heavy rain hammered the region. Eighteen people were killed because of weather-related incidents as reported by emergency officials [1]. Seven were killed in traffic incidents and twelve were killed in drowning incidents after driving through high water. Interstate 95 was one of the hundreds of roads that were closed due to flooding with some roads being completely washed away [1].
Cases of barricades marking washed-out roadways being illegally removed are not unfamiliar during emergency conditions [2]. In June 2011, barricades marking a washed-out municipal road were illegally removed in Brandon, Manitoba and no suspects were identified, and no one was charged. Similarly, during the historic floods in South Carolina, the barricade meant to keep people from driving on Congaree Road in Lower Richland County was moved by somebody else before a truck of five railroad repair employees went off the road into the water resulting in two fatalities [3].
Barricades have been used for decades to improve safety and not every barricade can be used at any incident or any place without satisfying the minimum standard requirements [4,5]. They can be classified into three classes based on the Manual on Uniform Traffic Control Devices (MUTCD). Type I barricades are used on conventional roads or urban streets and Type II or Type III barricades are used on freeways and expressways. Based on the traffic volume, Type I or Type II barricades can be used to direct traffic flow when traffic is minimum while Type III barricades can be used to close or partially close a road on higher volume highways.
In many of these reported cases where the barricade was removed, the duration at which the barricade was moved is unknown. A modified traffic barrier system with tracking could help remedy future cases of the duration when a barricade has been removed. During the last few decades of technological developments, different asset tracking technologies have been used to track and monitor objects. The employment of current technology such as Radio-Frequency Identification (RFID) technology combined with Global Positioning System (GPS) technology that can track the location of barricades may minimize or alleviate fatalities [6]. With the current artificial intelligence technology, a better way to detect misplaced barricades without physical presence such as computer vision approaches utilizing machine learning models can be useful [7]. Other technologies such as cloud-enabled Building Information Modeling (BIM) and Bluetooth Low-Energy (BLE) mobile tracking sensors can also be used to continuously detect unsafe conditions [8]. Nowadays, many devices are being equipped with GPS such as phones and vehicles [9].
Illegal barricade removal alerts using the micro-controller and the GPS module can be generated to assure the safety of road users and transportation agencies at a low cost [10]. It can be achieved with the GPS that locates the barricades and sends their location coordinates through Global System for Mobile Communications (GSM) or General Radio Packet Service (GPRS) modules [10,11,12,13,14]. As an example, the detection of road conditions such as potholes is capable of being marked by coordinates and uploaded to google maps to alert road users [15]. During real-time information sharing to the servers, the servers may be embedded with a GPRS module that is capable to locate periodically the transmitted information and converting them into a format that can be displayed using the Google Earth software [16,17].
In this study, a low-cost barricade monitoring system using a GPS module was proposed. The contributions can be listed as:
The motion detection and alert algorithms were developed to assist in the continuous monitoring of barricades when any illegal movements are detected.
The GPS positional error was estimated and corrected using the non-parametric data bootstrapping method.
The effects of cloudy and sunny weather conditions on the low-cost GPS modules response were noted.
The coverage distance of alerting was estimated using the American Association of State Highway and Transportation Officials (AASHTO), National Safety Council (NSC), and TransGuide Intelligent Transportation Systems manuals.
Alerts were sent to the authorizing agent through emails and once approved, alerts were sent to road users in a geofenced area on highways to alert them of impending dangers due to barricade displacement.
The paper is subdivided into five sections whereby the following section shows related studies on road assets monitoring. Section 3 shows the methodology employed and section 4 discusses the findings and conclusions. The final section discusses the limitations and recommendations of the study.
2. Literature Review
Barricades are key road assets for delineating a safe drivable area [18] but their use has not been developed to incorporate means to automatically track and monitor them [4]. It is expected that the future development of autonomous vehicles will require barricades' geographical location to be ascertained during their movements to improve the safety of road users.
According to the Texas Transportation Code, Title 6, Chapter 472.022, a person commits an offense if he disobeys the instructions, signals, warnings, or markings of a warning sign and/or drives around a barricade [19]. Due to this tendency especially when the road is closed, Aucxis (2022) has discussed how transportation agencies have looked for solutions that would enable their staff to efficiently identify and geolocate their barricades. European companies such as Qeos and Safetybloc have managed to have real-time, accurate monitoring of their concrete blocks and ascertain their location using RFID sensors [20]. Apart from RFID sensors, GPS sensors are capable to track and monitor movements since RFID sensors are constrained to the easiness of manipulation of their output data. GPS receivers support different formats such as Receiver Independent Exchange (RINEX) and National Marine Electronics Association (NMEA) that contain information such as latitude, longitude, time, speed, elevation, and Position Dilution of Precision (PDOP) that can be customized to many uses [21].
From the collected sensor data, Ranacher, et al.(2015) showed that these data are usually subject to noise errors that interfere with the accuracy, but they came up with how these data can be spatially and temporally autocorrelated to provide a quality estimate [22]. Apart from the sensor accuracy problem, Raghunath et al.(2011) suggested how the performance of the GPS is affected by ionospheric errors such as poor spacecraft ephemeris caused by right ascension, altitude, and declination [23] . Different scholars have tried to study statistical methods of GPS error distribution that seem to be adequate in applications and Abbous & Samanta (2017) managed to use the Mean Least Square Estimation (MLSE) statistical method to correct positional errors during data processing in real-time. They established a cost parameter that can be optimized in both real-time and post-processing [24]. The model was validated in different environments to study the positional error distribution and a higher correlation was observed in geolocating the same places.
Apart from sensor accuracy problems, the safety of the system needs to be reliable. Olokun (2021) proposed a vehicle accident detection and alert system using GSM and GPS modules that are capable to sense accidents using vibrational sensors and micro-controllers that had a decent accuracy at a low cost [25]. Also, Nanda et al. (2019) presented a system that can help to detect and locate accidents using GPS and GSM modules and inform authorities through text messages [26]. The system developed was capable to check the driver in drowsy and verifying if they have a valid driving license through already embedded RFID on license plates. These systems lack one thing in common which is alerting the road users within the geofenced area and lack communication with the roadside infrastructures.
The proposed barricades monitoring system will enhance the performance and reliability of driving assistance technology in Intelligent Transportation Systems (ITS) such as Driver Assistance Systems (DAS) and alert individuals on highways of the illegal removal of barricades. It can be used together with systems like Adaptive Cruise Control (ACC), forward collision warning, and lane departure warning systems that require accurate positioning data of roadside infrastructures to improve the safety of road users [18]. By seamlessly integrating this system in vehicles and roadside sensing devices, the sensing and communication capabilities of road infrastructures with individuals and authorities can be leveraged to achieve smart movements [27].
From the literature review, it has been observed that the GPS module has monitoring capabilities but is subject to different errors such as positional errors that need to be corrected. Also, the barricades monitoring system can be embedded in driver’s assistance technologies to improve safety since their lightweight property makes them easily compromised without notice. Furthermore, the literature review shows there are inadequate studies on alert systems for road users within a geofenced area. This study will propose efficient ways to track the illegal movement of the barricades in real-time and alert individuals and authorities hence improving safety and reducing property damages.
3. Methodology
This section briefly explains how the GPS module was integrated with a motion detection algorithm, and alert algorithm to generate google maps of an area where the barricade has been displaced. The system shows how alerts were sent to authorized agents and approved before being sent to the road users in a geofenced area.
3.1. The radius of the Geofenced Area
The radius of the geofenced area was defined as the total of three distances, the Critical Safety Distance (CSD), the Stopping Sight Distance (SSD), and the Extra Buffer Distance (EBD). The first distance from the traffic barricade location is the CSD which has been defined by the National Safety Council (NSC) such that the final warning sign should be placed 25 feet from the end-point of operation or traffic incident. NSC also has suggested the “Men Working” sign to be placed at 500 feet, the “Road closed” sign at 1000 feet, and the “Road Construction Ahead,” or “Barricade Ahead,” sign at 1500 feet from the incident [28]. The CSD was considered as 25 feet due to the critical nature of the event of barricade illegal removal.
The next distance considered from the traffic barricade location is the SSD which is estimated after drivers have noticed the incident and it is defined as the minimum sight distance required for drivers to stop the vehicle after seeing the incident on their paths without hitting it [29,30]. This is the sum of the perception-reaction time distance and braking distance given by the equation below.
where SSD is a stopping sight distance in feet, u is the design speed of the road section(mph), t is the braking reaction time that is estimated to be 2.5 seconds and a is the deceleration rate in ft/s2. Also, g is the acceleration due to gravity (32.17 ft/s2) and G is the grade of the road section (decimal).
The farthest distance is the EBD that has not been defined in manuals but was estimated using knowledge from the system level performance requirements for TransGuide Intelligent Transportation System. In the guide, the Dynamic Message System (DMS) update has been recommended to be accomplished within 15 seconds. This time and vehicle speed generate a distance corresponding to the AASHTO braking distance whose estimation can be done by considering the posted speed limit of the highway section. Figure 1 below shows a section with a posted speed limit of 70 mph (for freeways) to compute the corresponding three distances discussed above.
EBD= Design speed x time
But for the effectiveness of the computations, immediate response by Traffic Management Center (TMC) and drivers need to be assumed and at least one exit or intersection needs to be nearby for the driver to choose an alternative route. Hence to consider the risk to the traffic, our total distance is the summation of CSD, SSD, and EBD which leads to the radius of the geofenced area. Figure 2 below shows the radii of the geofenced area spatially.
3.2. GPS setting, Motion Detection, and Alerting
During the project execution, a raspberry pi 3 model B Vi.2 was configured, and a GPS module was attached to collect the real-time NMEA data. The GPS module generates timestamps, latitudes, and longitudes which were necessary for our use. These data were temporarily stored in the excel database and once any movement was detected by using the motion algorithm, it was checked if a threshold value was exceeded. The threshold value used was from the smallest dimension of the vehicle in the market called Renault Twizy, an electric ultra-compact vehicle with a 1.19m (3.9 feet) width [31]. This assumption was made to ensure any displacement of a barricade that can allow passage of the smallest assumed vehicle width can trigger alerting to the authorities as it will make vehicles and drivers unsafe. Figure 3 below shows the Renault Twizy model that has the smallest width within the current generation of car models.
Figure 4 below shows the flow chart that was developed in this study to illustrate the flow of information. Input from the GPS real-time NMEA data was used with latitudes, longitudes, and timestamps whereby threshold motion will need to be achieved for the alert system to be triggered. From the Smart Barricades Monitoring (SBMo) algorithm developed, the output expected is google maps and alerts to authorized agencies and road users.
3.3. Distance measurement
Before any detection to trigger alerting, location need was ascertained using latitudes and longitudes, then the distance is computed using the Haversine formula in real-time between two consecutive geolocations. The haversine formula used to determine the great-circle distance between two points on an Earth’s sphere is not accurate because it assumes the Earth to be a perfect sphere through its oblate spheroid, but it is among the best possible ways to measure distance on the Earth’s surface. Distance is computed using the formula (3) below.
where:
r = Earth’s radius ~ 6471km
φ1, φ2 are the latitude of point 1 and latitude of point 2,
λ1 and λ2 are the longitude of point 1 and the longitude of point 2.
Distance between two consecutive geolocations was measured to keep track of the distance every second and data were generated with a large error reported due to sensor noise and satellite positioning errors. The main sources of GPS errors can be caused by satellite position, GPS receiver features, and surrounding effects on the incoming signals. It is expected that the more the Global Navigation Satellite System (GNSS) frequency bands a GPS receiver can support, the better the accuracy. Figure 5 below shows how the signal transmission can be affected.
3.4. Data Bootstrapping to Determine GPS Positional Error during Localization
To correctly measure the GPS positional accuracy, the data bootstrapping method was used. The GPS module was left to run for 11 hours continuously, and the latitudes, longitudes, and distance were recorded while the GPS was stationary. To correct the GPS positioning error, the non-parametric bootstrapping method was used. Bootstrapping of data can be defined as the sampling with replacement from real data to estimate the variation in the statistic of interest which may be the mean, median, or standard deviation. One of the applications of the bootstrap is in assessing the accuracy of an estimate based on a sample of data from the population. The variation in the calculated distance using the Haversine formula indicated high positional errors. To filter the error, the mean of the bootstrapped data was calculated using the non-parametric data bootstrapping. The following were the procedures used in the process.
Data were resampled by sampling with replacements from the original distance data such that each bootstrap sample has M observations where hence the matrices for the n sample bootstrap will appear as.
From each bootstrap sample, estimates were calculated and denoted by hence a total of values of were obtained: . The mean and standard deviation statistics were computed using data.
Figure 6 and Figure 7 below shows the mean distances before bootstrapping data and after bootstrapping data with combinations, respectively. After bootstrapping the data from varied movements presented in Table 2, the GPS measurement positional error was determined. The value is approximately 3.2 meters (10.5 feet).
3.4.1. Experiment with varying barricade movements
Positional errors due to the GPS module used can be easily corrected and computed from the measured distance. After determining the GPS positional error, an experiment was carried out to determine the response/instance of the GPS sensor to the varied distance movements and different weather conditions. The recording was carried at the instants of 1m, 2m, and 3m movements with the return of the device to the reference point after every instant recorded. Below were the procedures.
- The device was left for one hour at the reference point before starting the stopwatch to stabilize and lock enough satellites.
- The stopwatch was started when the device is at the reference point and left for extra 5 minutes.
- The device was moved 1m and left for 5 minutes and then returned to the starting point and left there for 10 minutes.
- This was repeated for three more trials in a movement of 1 meter, five trials for a movement of 2 meters, and 3 trials for a movement of 3 meters.
Figure 8 below shows the response of the distance movements with the GPS positional error already corrected and noise data filtered out during a cloudy day.
After GPS positional error correction, the SBMo directly interfaces with the threshold value. Once the motion does not exceed the threshold value, nothing happens but once it exceeds the threshold value, the alert algorithm is activated.
3.5. Alert Algorithm
The alert system consists of two parts whereby the first is for alerting the authorities in charge of the barricades' safety and once the situation has been verified with the authorities, a signal is sent to alert all drivers within a geofenced area. These drivers will be on highways and a layer of highways from google maps was extracted to be geofenced. Authorities will be alerted through the email address and once the approval to alert users have been granted, the messaging will be triggered. The triggering of this email involves the verification of the distance exceeding the threshold distance set within the system and once the incident has been verified, alerts are sent to mobile phone users within the geofenced area. This geofenced area was approximately 1.04 miles.
3.5.1. Experiment on Alerting
During alerting, another experiment was done to determine how the pulse is generated and communicated to the authorizing agents through emails. Figure 9 below shows the distance movements in the instants of one meter and two meters and Figure 10 shows the corresponding alerting pulses during the experiment on a clear sunny day. The instants recorded were only two for one meter and another two for two meters hence two pulses per movement were expected after filtering the noise. Furthermore, Figure 8 and Figure 9 both show the response of a device to different barricade movements and in different weather conditions where Figure 8 was during a cloudy windy day and Figure 9 was during a clear sunny day. The response to barricade movements on a clear sunny day is easily differentiated from the response during a cloudy day.
3.6. Real-time data publishing and google maps setting
PubNub is a real-time communication platform for data streaming that is used to publish and subscribe to messaging API built on a global data stream network. With its extensive data network centers, it is widely used, and the streamer enables real-time geolocations to be published directly to the webpage hence improving communication safety. PubNub was used to generate publish and subscription keys which were locked to our application. Figure 11 below shows how PubNub works and how it streams data and verification of the data to be published was done by generating publish time tokens.
After publishing geolocations on the map, a real-time GPS tracker web was established, and hence any movement can be shown directly from the map. The generation of the map was enabled by using the Google APIs that were also locked in our system.
4. Findings and Conclusions
This research has studied how monitoring can be done on barricades and provided the potential for future studies. It was aimed at solving the illegal removal of barricades' risky behavior that happens without notice of road emergency officials and road users. Road users are usually prone to fatalities, and injuries while assets are prone to damage. The introduction and literature discussed how this is essential and how different scholars have used different technologies in monitoring to achieve safety. The research fills the gap in the road assets monitoring technologies for easy communication between road infrastructures, authorities, and road users. It has a detailed explanation of the GPS setting and error correction, generation of detection after a threshold distance equivalent to the smallest dimension of the car in the market, and alert algorithms to GPS position broadcasting within a road geofenced area. The following are the findings from the study.
Using a non-parametric data bootstrapping method, the GPS sensor's mean positional error of 3.2 meters (10.5 feet) was filtered.
The estimation of geofenced radius for alerting the public was estimated using the summation of three distances, the Critical Safety Distance (CSD), the Stopping Sight Distance (SSD), and the Extra Buffer Distance (EBD). The CSD was defined by the NSC such that the final warning sign should be placed 25 feet from the end-point of operation or traffic incident. The SSD is defined as the sum of the perception-reaction time distance and braking distance from AASHTO. The EBD was defined as the system-level performance requirements for TransGuide Intelligent Transportation System where the DMS updates. This geofenced radius was approximately 1.04 miles estimated when the posted speed limit is at 70mph and provision of extra distance for the driver to decide on the alternative route.
Data from a clear sunny day shows the best response since the difference in barricade movements can be seen for 1m and 2m movements compared to the cloudy day where movements can’t be easily explained. This might be caused by ionospheric effects where refraction and diffraction in the atmosphere change the apparent speed of satellite signals.
For the illegal barricade movements, detection of the illegal movements, alerting the authorizing agencies and road users, and updating the system for easy tracking are essential for the system to reduce fatalities and property damages. It is from these systems that safety can be assured.
5. Limitations and Recommendations of the Study
The study has a higher potential to be extended in areas where there is little network coverage and cover large distances using suitable sensors. Also, it can be applied in the ITS industry and driver assistance systems development that aims to ensure the safety of road users. Moreover, alerting on large scale requires authorization by the federal government, and a proper chain of commands needs to be laid.
Also in this study, the relationship of GPS positions on a barricade to GPS accuracy was not studied such as on top, at the edge, and the middle. Similarly, the nature of enclosing material to the GPS accuracy was not studied. It is expected further studies on these positioning will have a significant influence on GPS accuracy. With the expected monitoring system, contractors and the Department of Transportation are resting assured when working on highways as any illegal movements can be traced, or accidents that displace the barricades can be noticed at any time in a remote area.
Author Contributions
Conceptualization, Frank Ngeni, Judith Mwakalonge, Gurcan Comert and Saidi Siuhi; Data curation, Frank Ngeni, Gurcan Comert and Cuthbert Ruseruka; Formal analysis, Frank Ngeni, Judith Mwakalonge, Gurcan Comert, Saidi Siuhi and Cuthbert Ruseruka; Funding acquisition, Judith Mwakalonge, Gurcan Comert and Saidi Siuhi; Investigation, Frank Ngeni, Judith Mwakalonge and Cuthbert Ruseruka; Methodology, Frank Ngeni, Judith Mwakalonge, Gurcan Comert and Saidi Siuhi; Project administration, Judith Mwakalonge, Gurcan Comert and Saidi Siuhi; Resources, Judith Mwakalonge and Saidi Siuhi; Supervision, Judith Mwakalonge, Gurcan Comert and Saidi Siuhi; Validation, Gurcan Comert; Visualization, Frank Ngeni; Writing – original draft, Frank Ngeni; Writing – review & editing, Judith Mwakalonge, Gurcan Comert and Saidi Siuhi.
Data Availability Statement
The study used data collected from the sensors configured according to the proposed environment and can be found through the Center for Connected Multimodal Mobility (C²M²) website.
Acknowledgment
The study is funded by the Center for Connected Multimodal Mobility (C²M²) (Tier 1 University Transportation Center) Grant, from the U.S. Department of Transportation's University Transportation Centers Program and administered by the Transportation Program of the South Carolina State University (SCSU).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- H. Yan and R. Sanchez, "South Carolina flooding: Dams breached, more trouble ahead," 2015. [Online]. Available: https://www.cnn.com/2015/10/06/us/south-carolina-flooding/. [Accessed 29 July 2022].
- E. Rae, P. Campbell, K. Haynes, A. Gissing and L. Coates, "Preventing flood related fatalities–a focus on people driving through floodwater," in Research Forum 2016: Proceedings from the Research Forum at the Bushfire and Natural Hazards CRC & AFAC Conference (Vol. 30), Brisbane, Australia, 2016 .
- WIS-Staff, "Sheriff: Somebody else moved barricade before truck drove off," 2015. [Online]. [Accessed 7 October 2015].
- FHWA, "Figure 6F-7. Channelizing Devices," in Manual on Uniform Traffic Control Devices for Streets and Highways, Washington, DC USA, USDOT FHWA, 2009, pp. 604-606.
- J. Shi, Z. Li and M. Snyder, "Highway Work Zone Safety Audits at the Construction Stage," in 88th Annual Transportation Research Board Meeting, Washington D.C, 2009.
- S. Paul and E. A. Wan, "Wi-Fi based indoor localization and tracking using sigma-point Kalman filtering methods," in 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 2008.
- E. Chian, W. Fang, Y. M. Goh and J. Tian, "Computer vision approaches for detecting missing barricades," Automation in Construction Volume 131, p. 103862, 2021. [CrossRef]
- J. Park, K. Kim and Y. K. Cho, "Framework of Automated Construction-Safety Monitoring using Cloud-enabled," ASCE Journal of Construction Engineering and Management, pp. 10.1061/(ASCE)CO.1943-7862.0001223 , 05016019, 2017. [CrossRef]
- S. Tandon, S. Singhal, S. Khan and P. Kumar, "GPS System based Tracking model for Mobile phone," in Proceedings of the 6th International Conference on Communication and Electronics Systems (ICCES-2021), Coimbatre, India, 2021.
- C. L. Indukuri and K. Kottursamy, "Advanced Accident Avoiding, Tracking and SOS Alert System Using GPS Module and Raspberry Pi," Artificial Intelligence Techniques for Advanced Computing Applications, p. 167–178, 2020. [CrossRef]
- K. Maurya, M. Singh and N. Jain, "Real Time Vehicle Tracking System using GSM and GPS Technology-An Anti-theft Tracking System," nternational Journal of Electronics and Computer Science Engineering, 2012.
- D. Sunehra, V. S. Sreshta, V. Shashank and B. U. K. Goud, "Raspberry Pi Based Smart Wearable Device for Women Safety using GPS and GSM Technology," in 2020 IEEE International Conference for Innovation in Technology (INOCON), Bangluru, India, 2021.
- P. A. Shinde and Y. Mane, "Advanced vehicle monitoring and tracking system based on Raspberry Pi," in 2015 IEEE 9th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 2015.
- M. Jalayer, H. Zhou and B. Zhang, "Evaluation of navigation performances of GPS devices near interchange area pertaining to wrong-way driving," Journal of Traffic and Transportation Engineering (English Edition), pp. 593-601, 2016. [CrossRef]
- R. Sulistyowati, A. Suryowinoto, H. A. Sujono and I. Iswahyudi, "Monitoring of road damage detection systems using image processing methods and Google Map," IOP Conference Series: Materials Science and Engineering, pp. https://doi.org/10.1088/1757-899X/1010/1/012017, 2020. [CrossRef]
- K. S. Hasan, M. Rahman, A. L. Haque, M. A. Rahman, T. Rahman and M. Rasheed, "Cost Effective GPS-GPRS Based Object Tracking System," in Proceedings of the International MultiConference of Engineers and Computer Scientists 2009 Vol , Hong Kong, China, 2009.
- N. Chadil, A. Russameesawang and P. Keeratiwintakorn, "Real-time tracking management system using GPS, GPRS and Google earth," in 2008 5th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Krabi, Thailand, 2008.
- T. Kim and B. Song, "Detection and Tracking of Road Barrier Based on Radar and Vision Sensor Fusion," Journal of Sensors, p. https://doi.org/10.1155/2016/1963450, 2016. [CrossRef]
- J. USLaw, "2019 Texas Statutes Transportation Code Title 6 - Roadways Subtitle Z - Miscellaneous Roadway Provisions Chapter 472 - Miscellaneous Provisions," 26 March 2022. [Online]. Available: https://law.justia.com/codes/texas/2019/transportation-code/title-6/subtitle-z/chapter-472/subchapter-c/section-472-022/.
- Aucxis, "Safetybloc: tracing of safety barriers," 26 March 2022. [Online]. Available: https://www.aucxis.com/en/e-trade/cases/safetybloc-tracing-of-safety-barriers/e-trade.
- M. Shoab, K. Jain, M. A. Haq and M. Shashi, "Development and implementation of NMEA interpreter for real time GPS data logging," in Conference: Advance Computing Conference (IACC), Ghaziabad, India, 2013.
- P. Ranacher, R. Brunauer, S. v. d. SPEK and S. Reich, "GPS error and its effects on movement analysis," Instrumentation and Detectors, 2015.
- S. Raghunath, B.L.Malleswari and K. Sridhar, "Analysis of GPS errors during different times of the day," International Journal of Research in Computer Science, pp. 45-48, 2011. [CrossRef]
- E. Abbous and N. Samanta, "A modeling of GPS error distributions," in 2017 European Navigation Conference (ENC), Lausanne, Switzerland, 2017.
- Olokun, "Design and Construction of Microcontroller based Vehicle Accident detection and reporting System," International Journal of Engineering and Information Systems (IJEAIS), pp. 13-24, 2021.
- S. Nanda, H. Joshi and S. Khairnar, "An IOT Based Smart System for Accident Prevention and Detection," in 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 2019.
- J. Guerrero-Ibáñez, S. Zeadally and J. Contreras-Castillo, "Sensor Technologies for Intelligent Transportation Systems," Sensors (Basel), pp. 1-24, 2018. [CrossRef]
- NSC, "Barricades and warning devices for highway construction work," April 2016. [Online]. Available: https://www.nsc.org/getmedia/0d06a78e-983f-4ca0-a980-3e0b1acebb44/barricades-and-warnin-devices-for-highway-construction-work.pdf.aspx#:~:text=Final%20warning%20signs%20and%20barricades,feet%20beyond%20the%20repair%20zone..
- N. J. Garber and L. A. Hoel, Traffic and Highway Engineering Fourth Edition, Virginia, USA: Thomson West, 2009.
- AASHTO, A policy on Geometric Design of Highways and Streets 6th Edition, Washington, DC: American Association of State Highway and Transportation Officials, 2011.
- S. N. SRL, "RENAULT Twizy 2012 - Present," 27 October 2020. [Online]. Available: https://www.autoevolution.com/cars/renault-twizy-2012.html#aeng_renault-twizy-2012-urban-45-5-hp.
- crowdcontrolwarehouse, "Which Type of Barricade Do I Need? A User’s Guide," 30 Jul 2018. [Online]. Available: https://www.crowdcontrolwarehouse.com/blogs/blog/which-type-of-barricade-do-i-need-a-user-s-guide?msclkid=72012a72aa3111ecb43a6089493cd771.
Figure 1.
Radius of Geofenced Area Estimations.
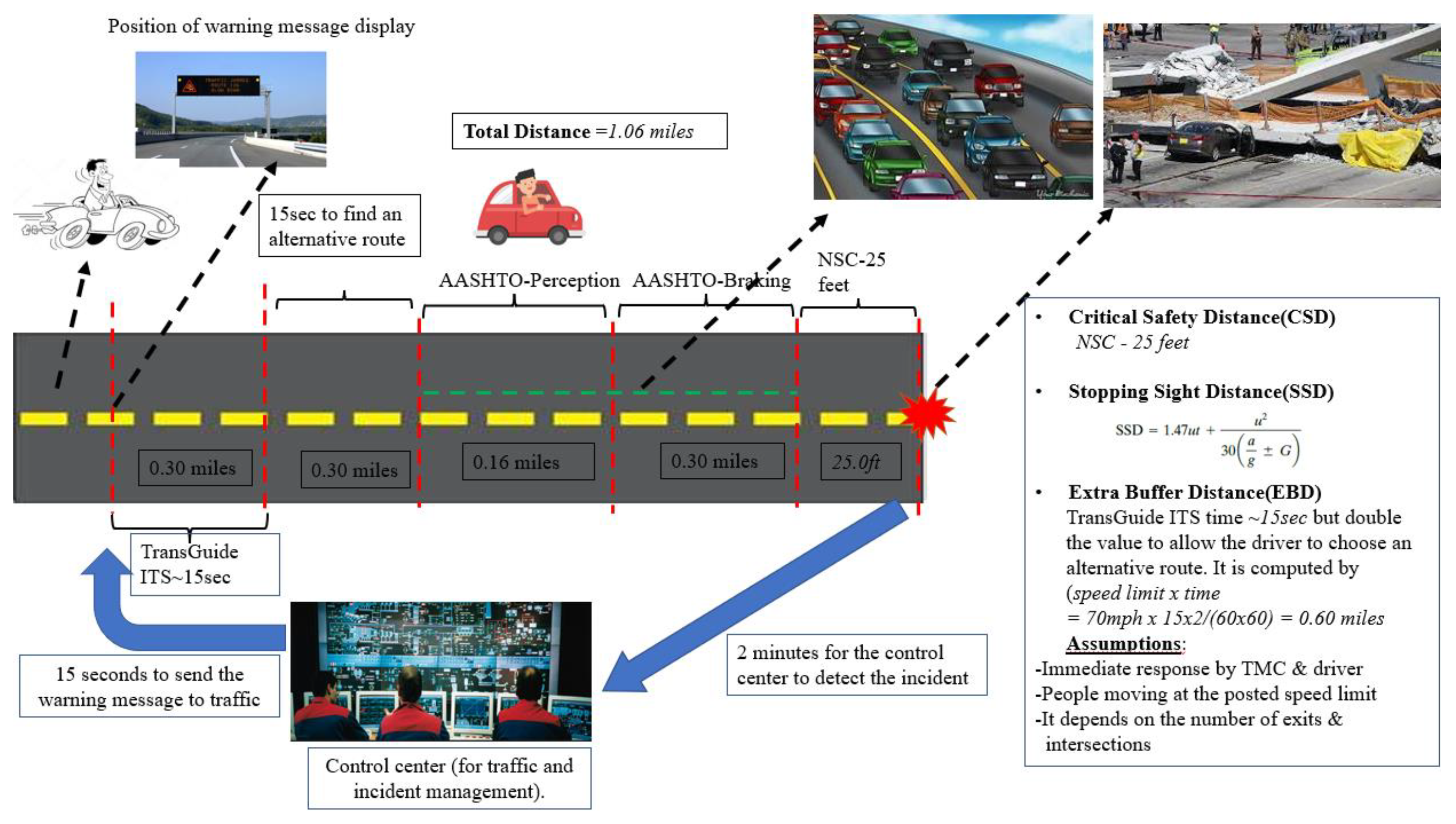
Figure 2.
Coverage of Geofenced Area.
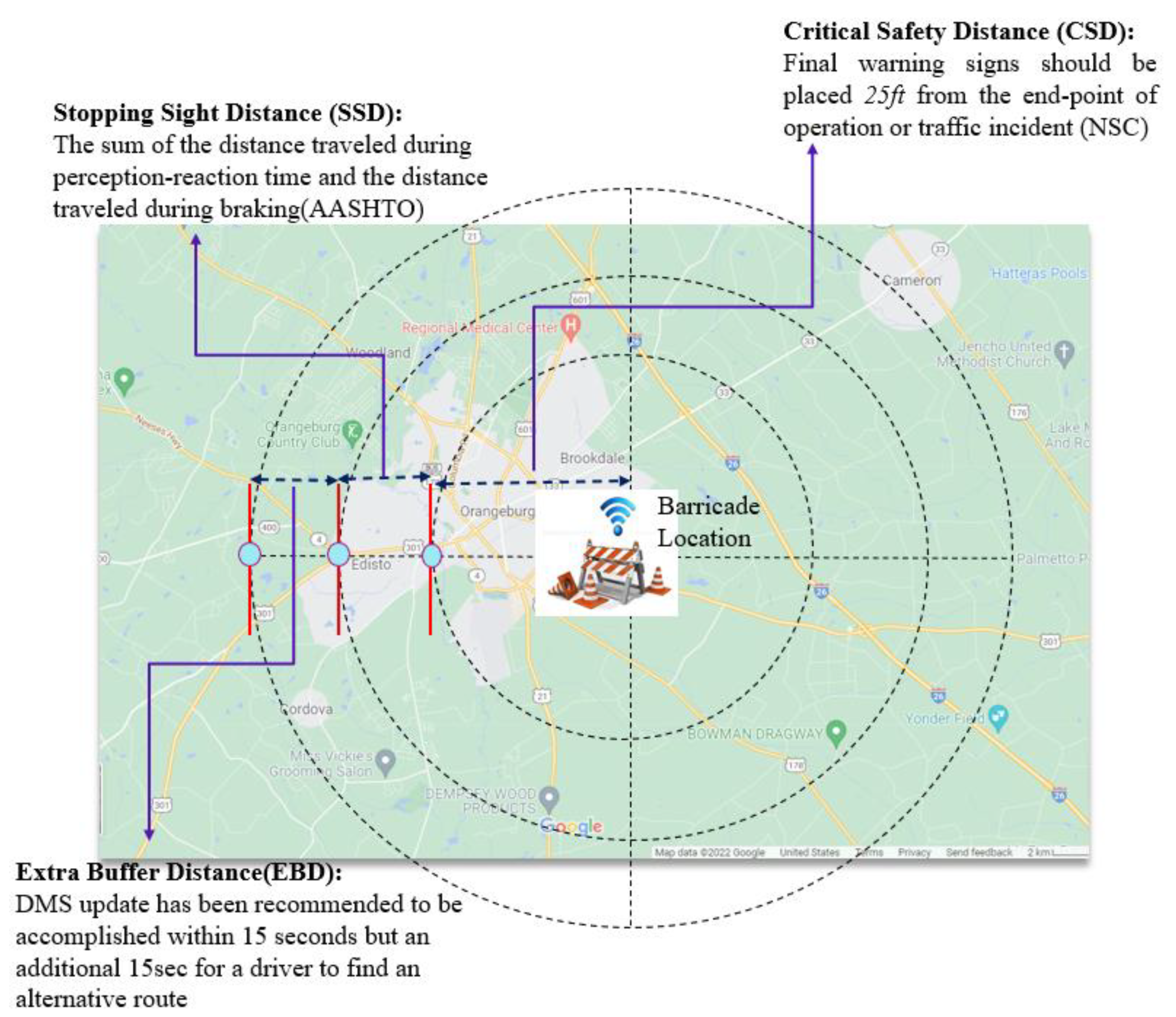
Figure 3.
The Renault Twizy Model.
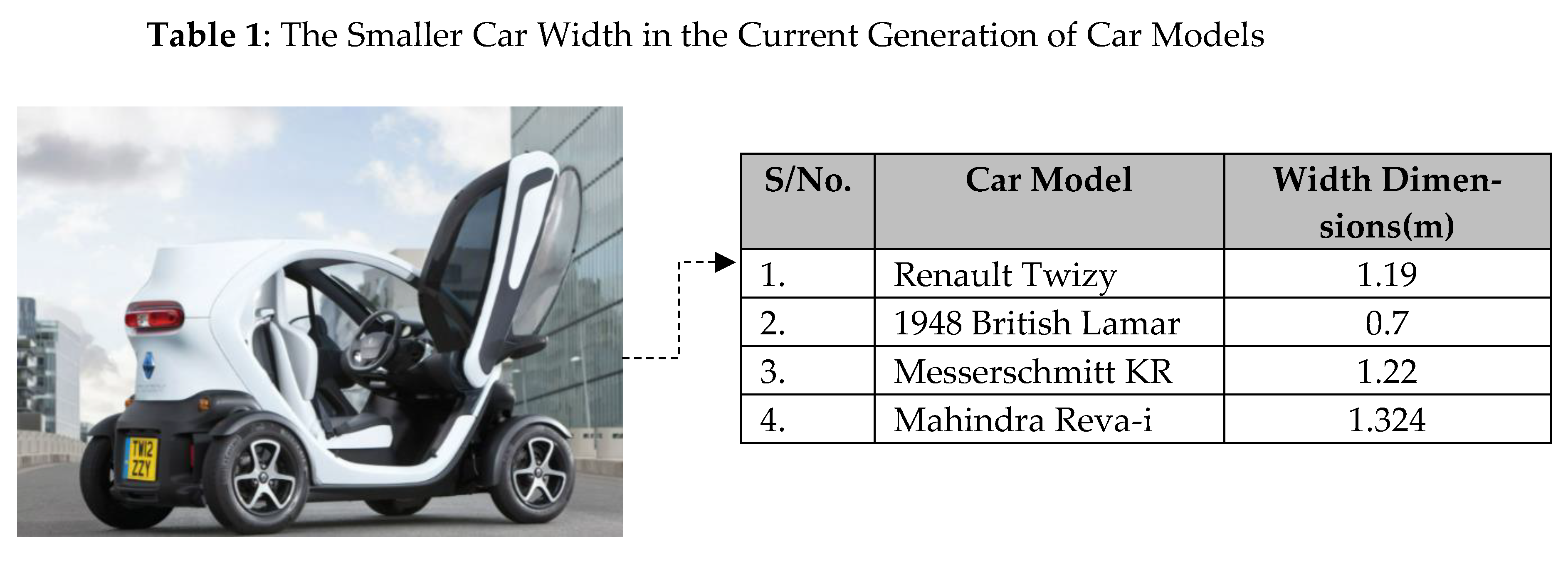
Figure 4.
The Flow Chart of the Proposed Smart Barricades Monitoring (SBMo) System.
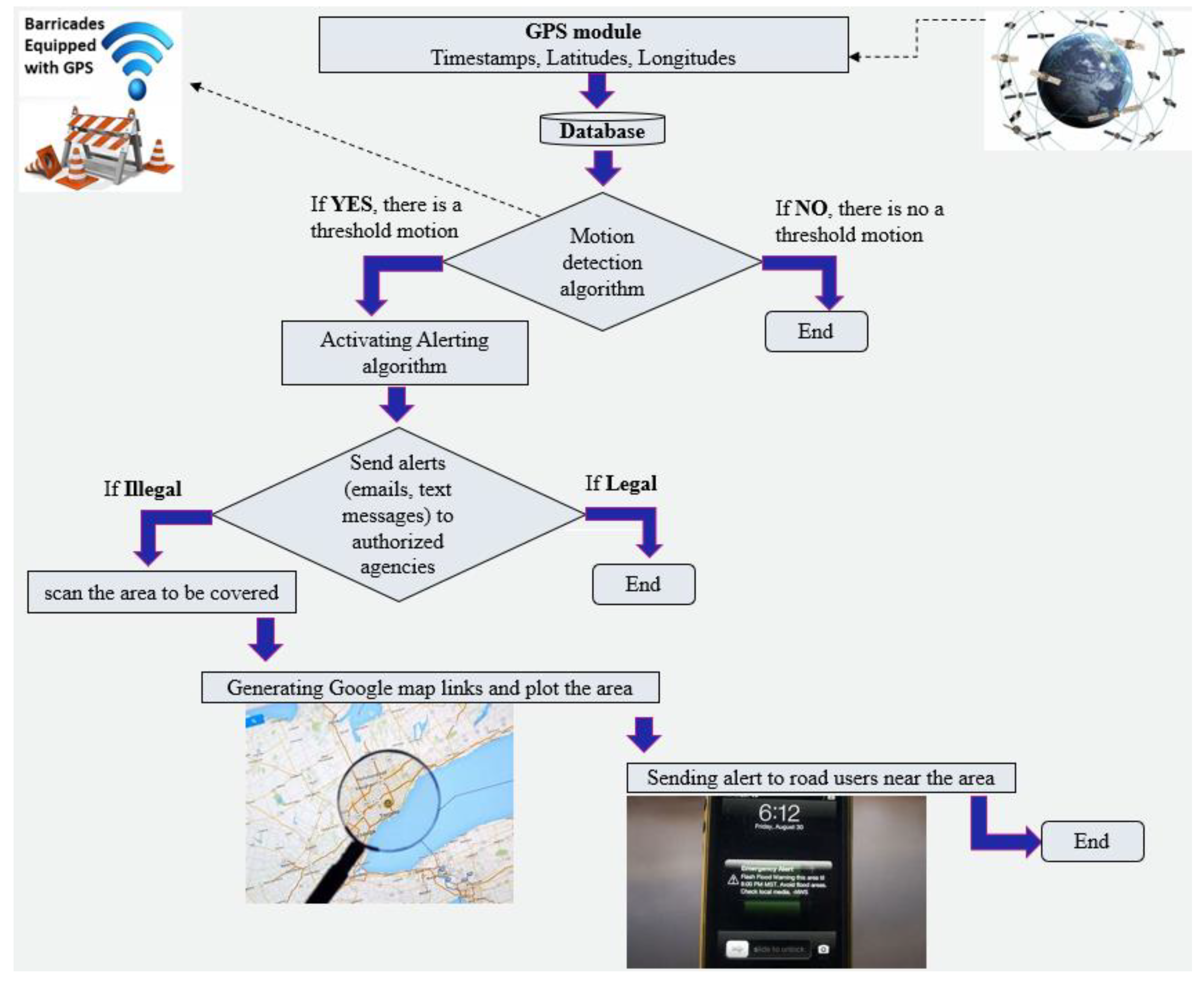
Figure 5.
The Effects of the Surrounding Environment on the Signal Transmission.
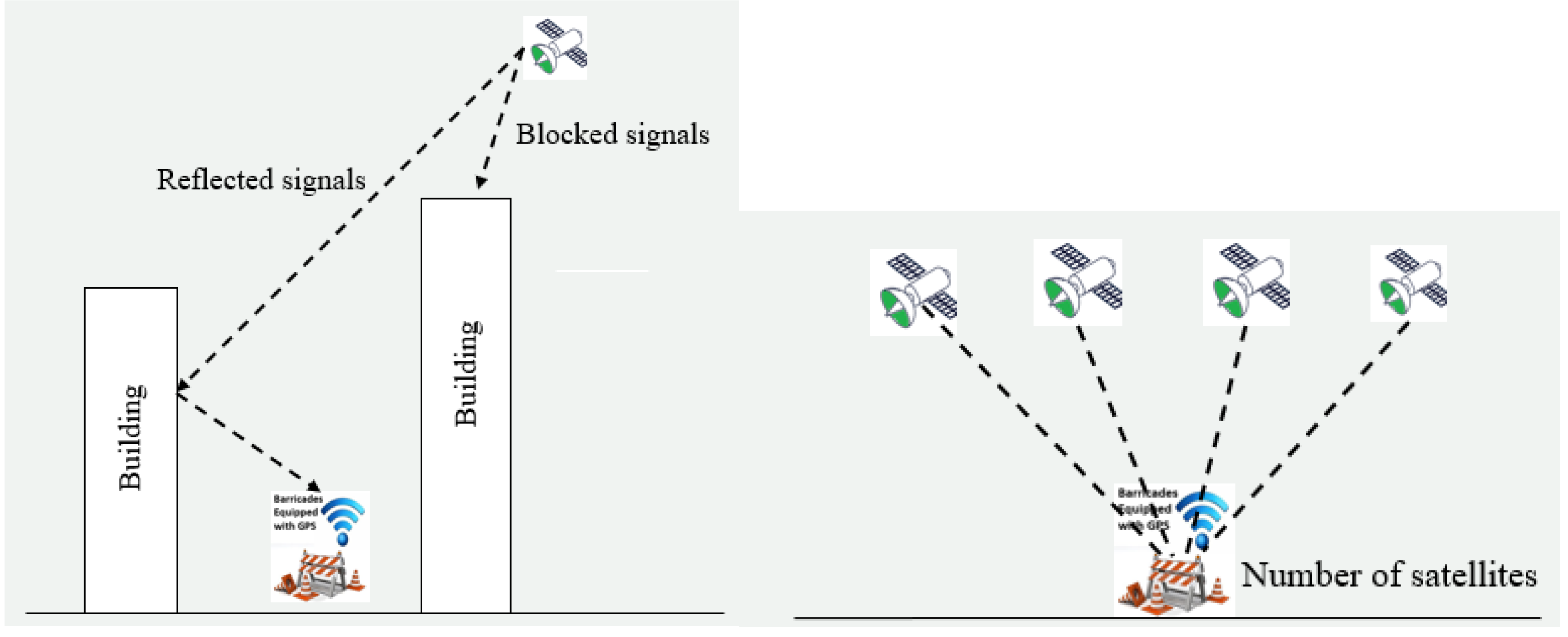
Figure 6.
Mean Distance(meters) before Bootstrapping the Data.
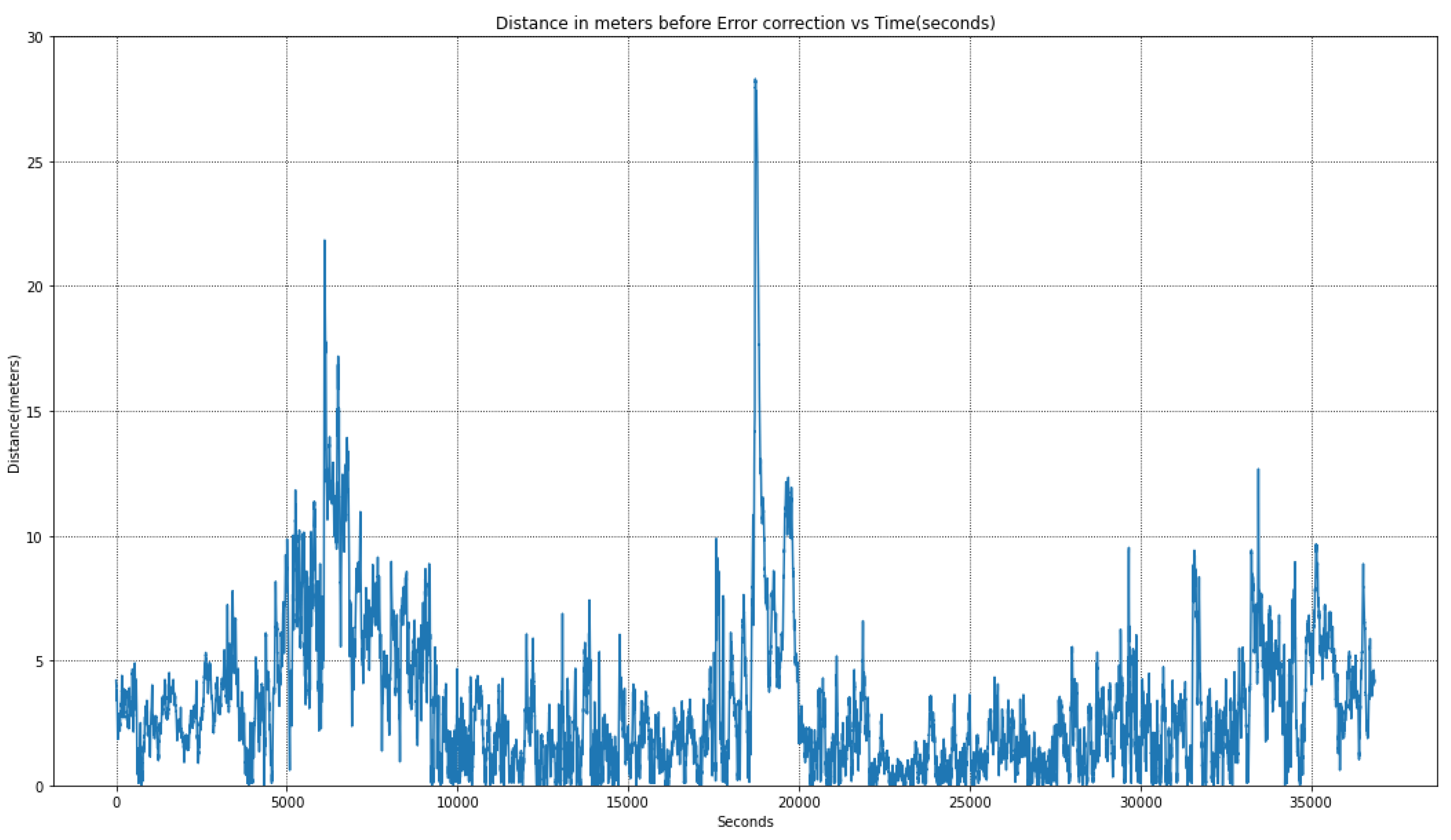
Figure 7.
Mean Distance(meters) after Bootstrapping the Data.
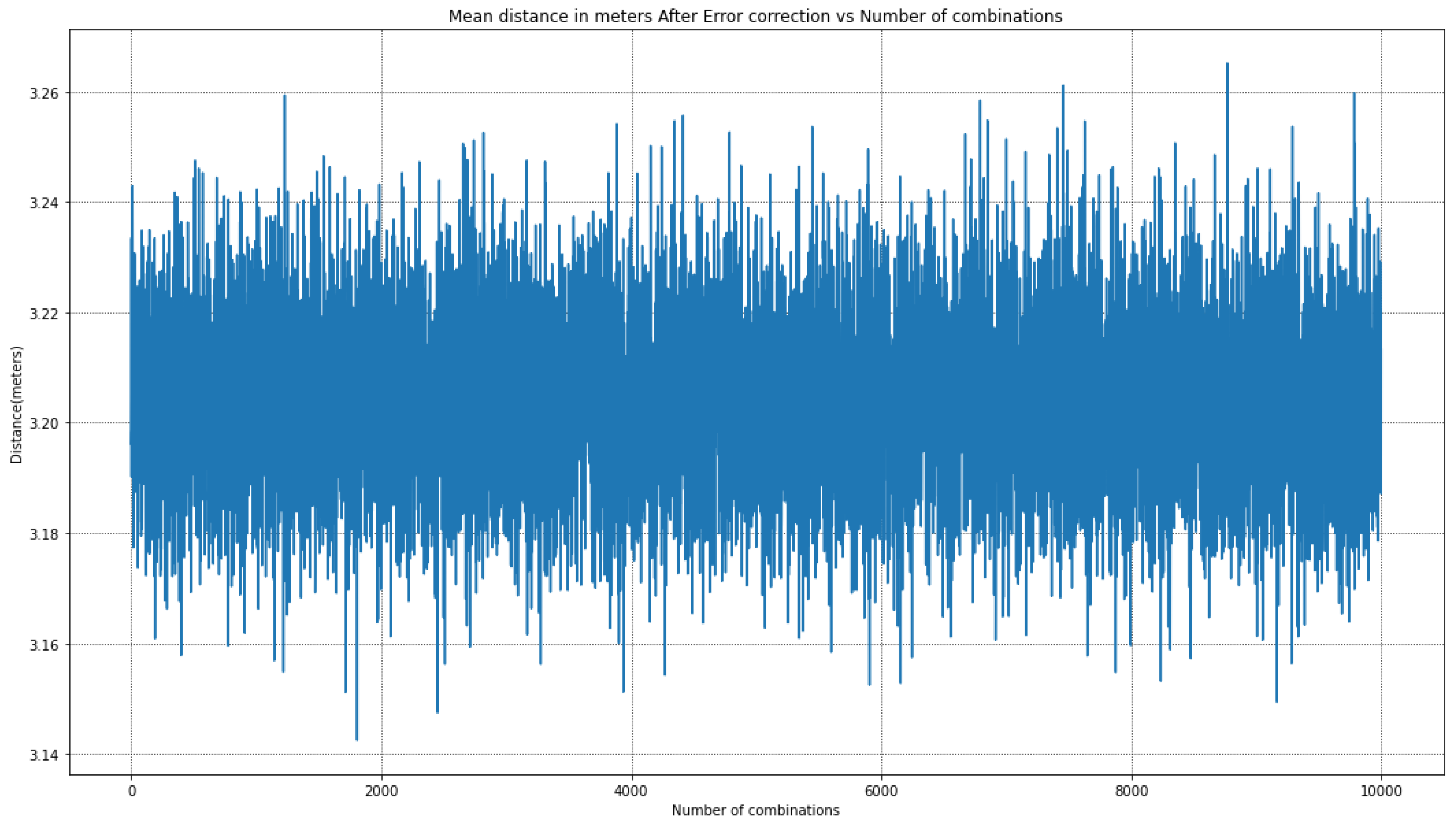
Figure 8.
GPS Distance Signature after GPS Positional Error Correction and Noise Data Filtered.
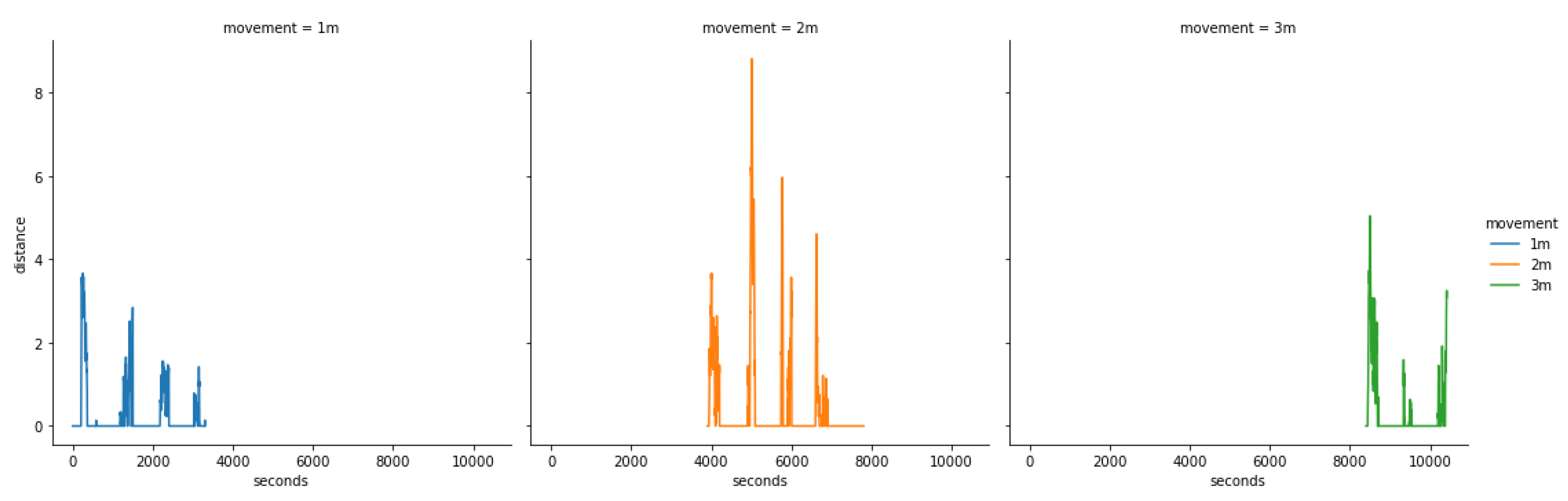
Figure 9.
GPS Distance Signature during Alerting.
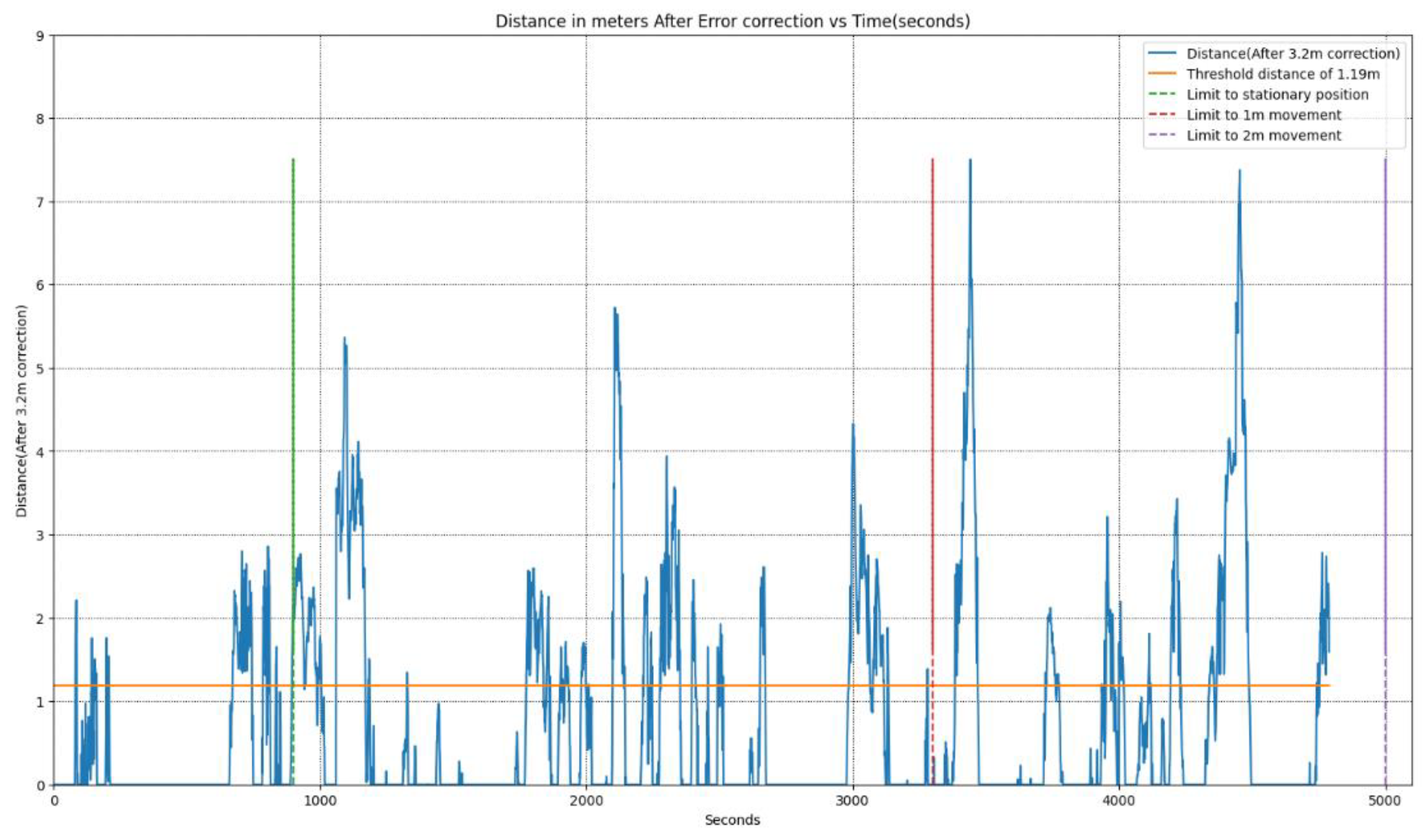
Figure 10.
Alerting Pulses after the Threshold Values have been Exceeded.
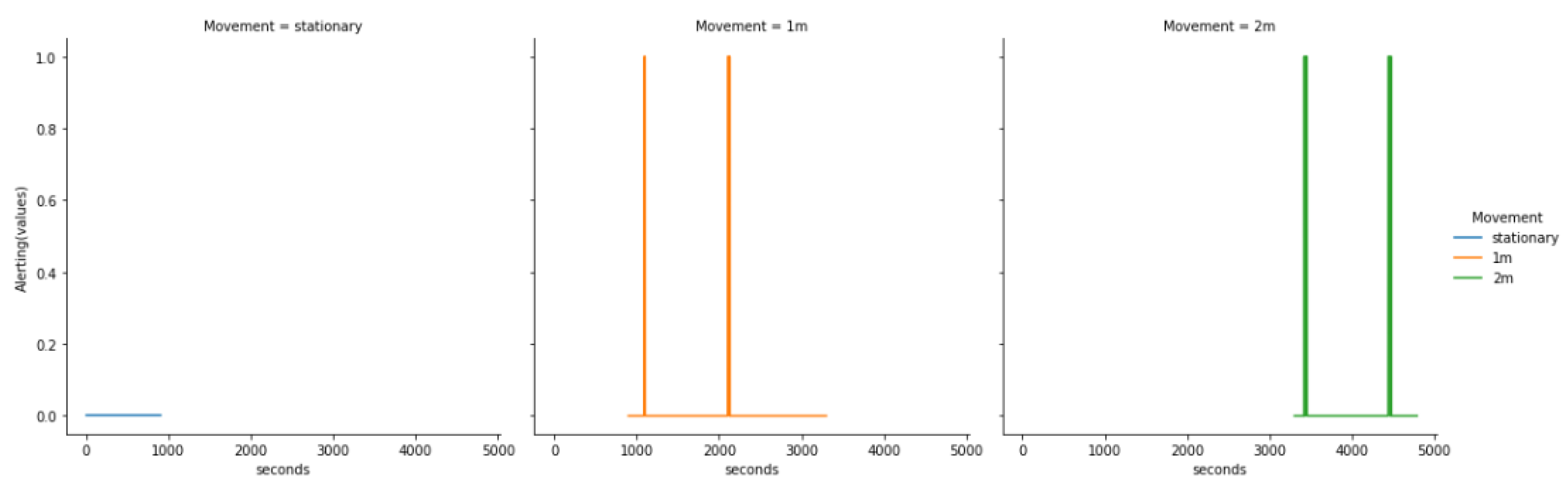
Figure 11.
PubNub Communication Protocol.
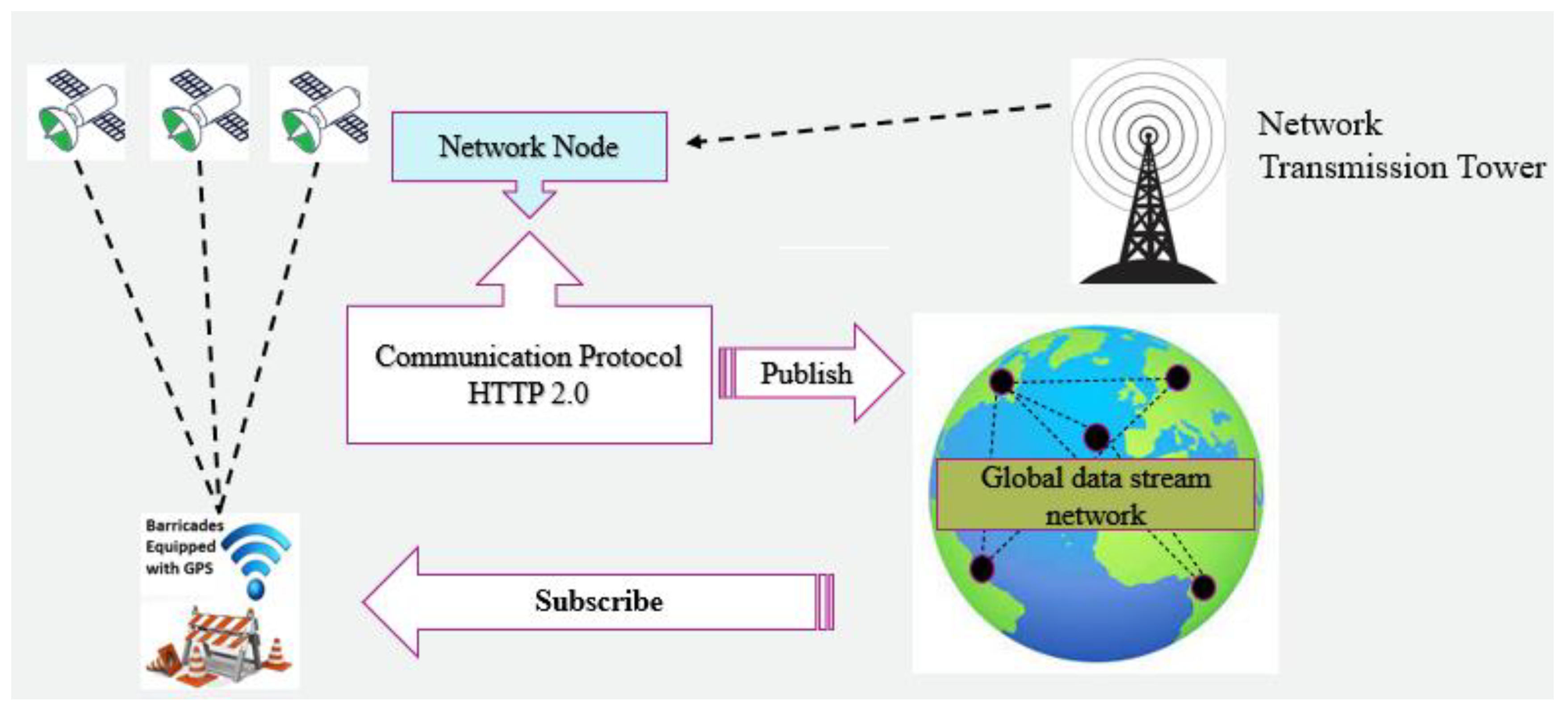
Figure 12.
Data Publication Summary.
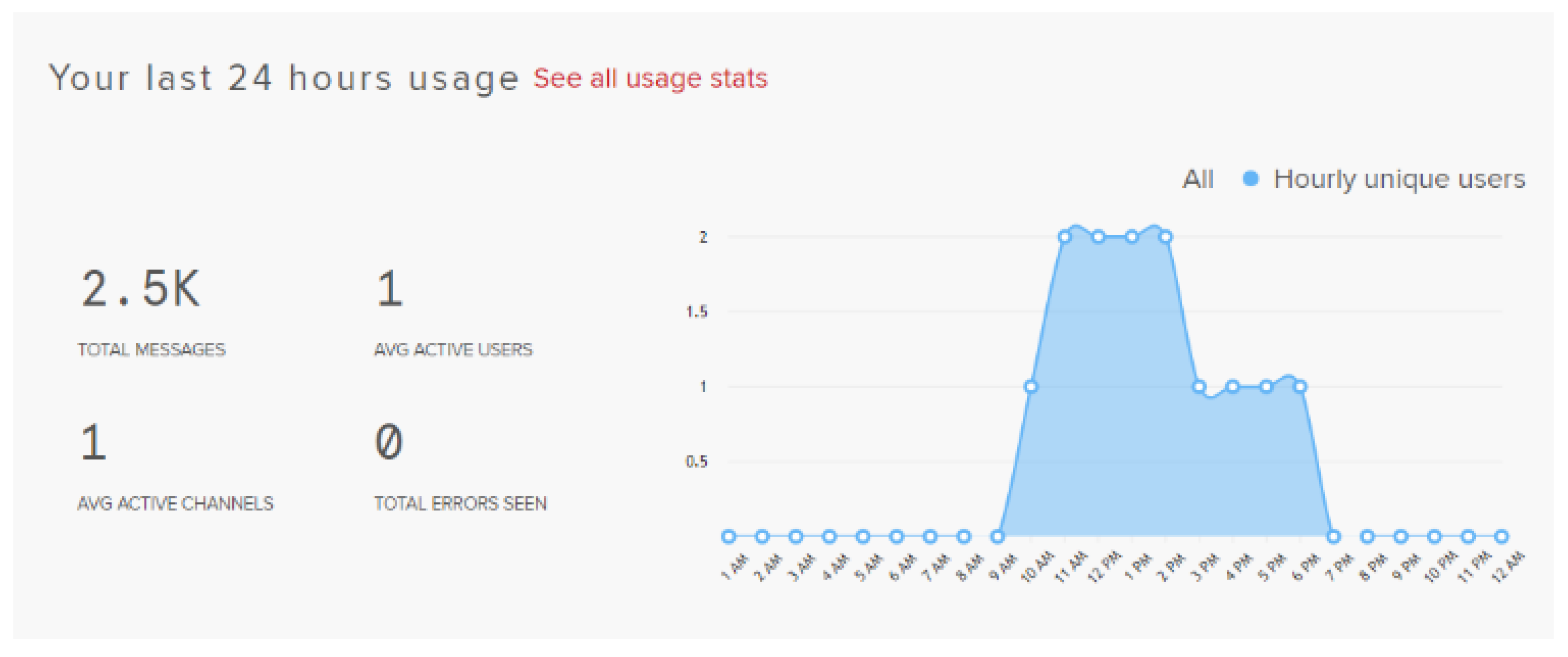

Table 2.
GPS Error during Localization.
| Distances | Latitudes | Longitudes | Distance(meters) |
|---|---|---|---|
| Point +0.00 | **.49957306119927 | ***.856297181292 | 3.204471520291802 |
| Std Dev. | 1.93786058152934x10-7 | 2.03430276002898x10-7 | 0.0154570551489699 |
| Movements | |||
| Point +1.00 | **.49954945615861 | ***.85627567619393 | 3.205542711411834 |
| Point +2.00 | **.499549451939835 | ***.85627568267905 | 3.204673121251192 |
| Point +3.00 | **.499532325901654 | ***.85626621422949 | 3.208452550474691 |
| Point +4.00 | **.499581174901614 | ***.85629939177933 | 3.206421531233605 |
| ** and *** have been used for the privacy of my location | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



